Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Discovering New Ways To Apply AI - ML in Communication Networks - Meet The Winning Teams in The ITU AI - ML in 5G Challenge - AI For GoodDokument3 SeitenDiscovering New Ways To Apply AI - ML in Communication Networks - Meet The Winning Teams in The ITU AI - ML in 5G Challenge - AI For Goodanuj1166Noch keine Bewertungen
- VerifAI UCBDokument7 SeitenVerifAI UCBanuj1166Noch keine Bewertungen
- MEMVT006Dokument1 SeiteMEMVT006anuj1166Noch keine Bewertungen
- Addressing The IEEE AV Test Challenge With Scenic and VerifAIDokument7 SeitenAddressing The IEEE AV Test Challenge With Scenic and VerifAIanuj1166Noch keine Bewertungen
- Swinburne - An Empirical Testing of Autonomous VehicleDokument7 SeitenSwinburne - An Empirical Testing of Autonomous Vehicleanuj1166Noch keine Bewertungen
- 1 " (T: : 2 3 4 5 6 P... Il ? """."." 8 9 10 Yt"t 11 12 13 14 19:9:T 79 2A If 1)Dokument3 Seiten1 " (T: : 2 3 4 5 6 P... Il ? """."." 8 9 10 Yt"t 11 12 13 14 19:9:T 79 2A If 1)anuj1166Noch keine Bewertungen
- Hybrid Model Predictive Control of Public Trans-Port OperationsDokument20 SeitenHybrid Model Predictive Control of Public Trans-Port Operationsanuj1166Noch keine Bewertungen
- Ip Lab ManualDokument52 SeitenIp Lab Manualanuj1166Noch keine Bewertungen
- List of Tables: NO Particulars Page NoDokument4 SeitenList of Tables: NO Particulars Page Noanuj1166Noch keine Bewertungen
- Electro Dynamometer TypeDokument5 SeitenElectro Dynamometer Typeanuj1166Noch keine Bewertungen
- T tn003Dokument8 SeitenT tn003anuj1166Noch keine Bewertungen
- 5three PDFDokument5 Seiten5three PDFanuj1166Noch keine Bewertungen
- ISO Forms - For Various Activities: Department AdministrationDokument1 SeiteISO Forms - For Various Activities: Department Administrationanuj1166Noch keine Bewertungen
- PX7301-Power Electronics For Renewable Energy SystemsDokument11 SeitenPX7301-Power Electronics For Renewable Energy Systemsanuj1166Noch keine Bewertungen
- Jansons Institute of Technology: Jit0141 Power Plant EngineeringDokument45 SeitenJansons Institute of Technology: Jit0141 Power Plant Engineeringanuj1166Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Ovation E-Amp: A 180 W High-Fidelity Audio Power AmplifierDokument61 SeitenThe Ovation E-Amp: A 180 W High-Fidelity Audio Power AmplifierNini Farribas100% (1)
- Nikos MIDI Pack - Chord Progression GuideDokument5 SeitenNikos MIDI Pack - Chord Progression GuideSamuel ThompsonNoch keine Bewertungen
- The Mooring Pattern Study For Q-Flex Type LNG Carriers Scheduled For Berthing at Ege Gaz Aliaga LNG TerminalDokument6 SeitenThe Mooring Pattern Study For Q-Flex Type LNG Carriers Scheduled For Berthing at Ege Gaz Aliaga LNG TerminalMahad Abdi100% (1)
- De Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020Dokument11 SeitenDe Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020HiềnNoch keine Bewertungen
- Sale Counter List JuneDokument9 SeitenSale Counter List Junep6a4nduNoch keine Bewertungen
- Registration ListDokument5 SeitenRegistration ListGnanesh Shetty BharathipuraNoch keine Bewertungen
- 3D Printing & Embedded ElectronicsDokument7 Seiten3D Printing & Embedded ElectronicsSantiago PatitucciNoch keine Bewertungen
- The Turning Circle of VehiclesDokument2 SeitenThe Turning Circle of Vehiclesanon_170098985Noch keine Bewertungen
- Assessment of Embodied Carbon Emissions For Building Construc - 2016 - Energy AnDokument11 SeitenAssessment of Embodied Carbon Emissions For Building Construc - 2016 - Energy Any4smaniNoch keine Bewertungen
- Praise and Worship Songs Volume 2 PDFDokument92 SeitenPraise and Worship Songs Volume 2 PDFDaniel AnayaNoch keine Bewertungen
- D25KS Sanvick PDFDokument4 SeitenD25KS Sanvick PDFJiménez Manuel100% (1)
- Modular Q1 WK3-4Dokument3 SeitenModular Q1 WK3-4JENIFFER DE LEONNoch keine Bewertungen
- VRPIN 01843 PsychiatricReportDrivers 1112 WEBDokument2 SeitenVRPIN 01843 PsychiatricReportDrivers 1112 WEBeverlord123Noch keine Bewertungen
- PlateNo 1Dokument7 SeitenPlateNo 1Franz Anfernee Felipe GenerosoNoch keine Bewertungen
- PDFDokument3 SeitenPDFAhmedraza123 NagdaNoch keine Bewertungen
- Kissoft 15,69,0.4Dokument10 SeitenKissoft 15,69,0.4Daggupati PraveenNoch keine Bewertungen
- 18-MCE-49 Lab Session 01Dokument5 Seiten18-MCE-49 Lab Session 01Waqar IbrahimNoch keine Bewertungen
- Create A Visual DopplerDokument1 SeiteCreate A Visual DopplerRahul GandhiNoch keine Bewertungen
- Coaxial Cable Attenuation ChartDokument6 SeitenCoaxial Cable Attenuation ChartNam PhamNoch keine Bewertungen
- DJ Crypto ResumeDokument1 SeiteDJ Crypto ResumeNitin MahawarNoch keine Bewertungen
- SafetyRelay CR30Dokument3 SeitenSafetyRelay CR30Luis GuardiaNoch keine Bewertungen
- Hele Grade4Dokument56 SeitenHele Grade4Chard Gonzales100% (3)
- Lightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationDokument2 SeitenLightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationAnas BasarahNoch keine Bewertungen
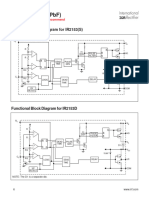
- IR2153 Parte6Dokument1 SeiteIR2153 Parte6FRANK NIELE DE OLIVEIRANoch keine Bewertungen
- Diogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFDokument54 SeitenDiogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFAndres Felipe Pineda JaimesNoch keine Bewertungen
- Active Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023Dokument119 SeitenActive Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023jagdeepchkNoch keine Bewertungen
- 2 Design of DOSAGE DESIGNDokument16 Seiten2 Design of DOSAGE DESIGNMarjo100% (1)
- Mathmatcs Joint Form TwoDokument11 SeitenMathmatcs Joint Form TwoNurudi jumaNoch keine Bewertungen
- Carnegie Mellon Thesis RepositoryDokument4 SeitenCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- SDSSSSDDokument1 SeiteSDSSSSDmirfanjpcgmailcomNoch keine Bewertungen