Das könnte Ihnen auch gefallen
- Lab 2 BFSK and QAM Matlab SimulationDokument3 SeitenLab 2 BFSK and QAM Matlab SimulationMichael HsiaoNoch keine Bewertungen
- Simulation of Data Communication Techniques in MatlabDokument8 SeitenSimulation of Data Communication Techniques in MatlabJavier Ruiz ThorrensNoch keine Bewertungen
- 2D Arrays Mini-AssignmentDokument2 Seiten2D Arrays Mini-AssignmentMichael HsiaoNoch keine Bewertungen
- 2.1 Random Variables 2.1.1 Definition: PX PX XDokument13 Seiten2.1 Random Variables 2.1.1 Definition: PX PX XMichael Hsiao100% (1)
- DSP1 - DSP820S PDFDokument53 SeitenDSP1 - DSP820S PDFMichael HsiaoNoch keine Bewertungen
- ICN210S Assignment 1Dokument11 SeitenICN210S Assignment 1Michael HsiaoNoch keine Bewertungen
- Block Diagrams - Lecture NotesDokument8 SeitenBlock Diagrams - Lecture NotesMichael HsiaoNoch keine Bewertungen
- Slope (Integrating) Adc - Digital-Analog ConversionDokument3 SeitenSlope (Integrating) Adc - Digital-Analog ConversionMichael HsiaoNoch keine Bewertungen
- Programme Timetable - Bachelor of Engineering: Electronics & Telecommunications s1Dokument7 SeitenProgramme Timetable - Bachelor of Engineering: Electronics & Telecommunications s1Michael HsiaoNoch keine Bewertungen
- Developing A Networking LexiconDokument2 SeitenDeveloping A Networking LexiconMichael HsiaoNoch keine Bewertungen
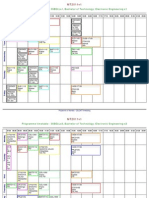
- Programme Timetable - 35bells1, Bachelor of Technology: Electronic Engineering S1Dokument6 SeitenProgramme Timetable - 35bells1, Bachelor of Technology: Electronic Engineering S1Michael HsiaoNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- ProTrack I ManualDokument203 SeitenProTrack I ManualhishamuddinohariNoch keine Bewertungen
- Optimized 250kW PV array parametersDokument2 SeitenOptimized 250kW PV array parametersMarwa EltouhamyNoch keine Bewertungen
- CH10 CFLDokument11 SeitenCH10 CFLNoman KhanNoch keine Bewertungen
- RS485 - MODBUS Communication Protocol - EPM - 125KDokument14 SeitenRS485 - MODBUS Communication Protocol - EPM - 125KSuray MittalNoch keine Bewertungen
- Power in AC Circuit Lab ReportDokument8 SeitenPower in AC Circuit Lab ReportJEJUNG67% (3)
- Evaluating MPPT Converter Topologies Using A Matlab PV ModelDokument6 SeitenEvaluating MPPT Converter Topologies Using A Matlab PV Modelmohammadjm2008Noch keine Bewertungen
- Midcom 671-8422 Transformer 600 OhmDokument1 SeiteMidcom 671-8422 Transformer 600 OhmBenjamin DoverNoch keine Bewertungen
- PMC-670 English Datasheet (20151026)Dokument8 SeitenPMC-670 English Datasheet (20151026)Ronald H SantosNoch keine Bewertungen
- Thermoelectric Renewable Energy PerformanceDokument19 SeitenThermoelectric Renewable Energy Performancekamy_8524Noch keine Bewertungen
- BSS BrochureDokument36 SeitenBSS BrochureSoltani AliNoch keine Bewertungen
- Waste Segregator ReportDokument33 SeitenWaste Segregator ReportVinodNKumar25% (4)
- ProposalDokument10 SeitenProposalSujanNoch keine Bewertungen
- Littelfuse TVS Diode 20KPA Datasheet - pdf-369791Dokument7 SeitenLittelfuse TVS Diode 20KPA Datasheet - pdf-369791K.S. BalasubramaniamNoch keine Bewertungen
- (Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Dokument35 Seiten(Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Leo AudeNoch keine Bewertungen
- Flowcon Ft.0.2, Ft.0.3 and Ft.0.4 Actuators: Installation and Operation InstructionDokument2 SeitenFlowcon Ft.0.2, Ft.0.3 and Ft.0.4 Actuators: Installation and Operation Instructionimron hilmanNoch keine Bewertungen
- Difference Between Squirrel Cage and Wound Rotor - Google Search PDFDokument81 SeitenDifference Between Squirrel Cage and Wound Rotor - Google Search PDFasadNoch keine Bewertungen
- ZrO2 Effects on NTC Thermistor CharacteristicsDokument8 SeitenZrO2 Effects on NTC Thermistor Characteristicsdaniel putraNoch keine Bewertungen
- Kemppi Mastertig Mls Acdc PDFDokument3 SeitenKemppi Mastertig Mls Acdc PDFikhyaul ibadNoch keine Bewertungen
- Simulation of Phase Controlled Rectifiers UsingDokument10 SeitenSimulation of Phase Controlled Rectifiers UsinggubiliNoch keine Bewertungen
- Design of A Non-Overlapping Clock Generator For RFID Transponder EEPROMDokument4 SeitenDesign of A Non-Overlapping Clock Generator For RFID Transponder EEPROM翁偉倫Noch keine Bewertungen
- 2CDC112192D0201Dokument9 Seiten2CDC112192D0201Slobodan SavicNoch keine Bewertungen
- Grade 10 Eim Module 4Dokument6 SeitenGrade 10 Eim Module 4Nina MillaNoch keine Bewertungen
- Chapter (1-5) ExDokument38 SeitenChapter (1-5) ExRichard Simon KisituNoch keine Bewertungen
- V3435SP - SP Programming ManualDokument20 SeitenV3435SP - SP Programming ManualFaba FacturaNoch keine Bewertungen
- TPG Relays ABB REF615 UPT PadangDokument6 SeitenTPG Relays ABB REF615 UPT PadangYudi PratamaNoch keine Bewertungen
- Design of A Tri-Band Wearable Antenna For Millimeter-Wave 5G ApplicationsDokument14 SeitenDesign of A Tri-Band Wearable Antenna For Millimeter-Wave 5G ApplicationsBilal MalikNoch keine Bewertungen
- Electronic Ballast With Automatic Luminous Variation and Presence Detection Using Microcontroller and Self-Oscillating Command PDFDokument7 SeitenElectronic Ballast With Automatic Luminous Variation and Presence Detection Using Microcontroller and Self-Oscillating Command PDFBhavani NamrataNoch keine Bewertungen
- VersaLight: An Eco-Friendly Emergency LightDokument28 SeitenVersaLight: An Eco-Friendly Emergency LightCHELSIE KAITLYN DE GUZMANNoch keine Bewertungen
- LCD Television Service Manual: Chassis MT5380 Product TypeDokument50 SeitenLCD Television Service Manual: Chassis MT5380 Product Typekachappilly2012100% (1)
- Pages From CAPSTONE Community-PROJECT-PAPER-FINAL-Part 1Dokument14 SeitenPages From CAPSTONE Community-PROJECT-PAPER-FINAL-Part 1Jason PeñaNoch keine Bewertungen