Das könnte Ihnen auch gefallen
- RCD2Dokument59 SeitenRCD2Bobby AguilarNoch keine Bewertungen
- Nonlinear Ordinary Differential Equations in Transport ProcessesVon EverandNonlinear Ordinary Differential Equations in Transport ProcessesNoch keine Bewertungen
- Bone BiomechanicsDokument36 SeitenBone BiomechanicsAliNoch keine Bewertungen
- Methods of Functional Analysis for Application in Solid MechanicsVon EverandMethods of Functional Analysis for Application in Solid MechanicsNoch keine Bewertungen
- 4 Infinitesimal StrainsDokument58 Seiten4 Infinitesimal StrainsRabindraSubediNoch keine Bewertungen
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsVon EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNoch keine Bewertungen
- SEMM Comp Dynamics Sp20Dokument5 SeitenSEMM Comp Dynamics Sp20RAFAELNoch keine Bewertungen
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989Von EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNoch keine Bewertungen
- Chapter 11 of Rock Mass PropertiesDokument43 SeitenChapter 11 of Rock Mass PropertiesJosé Luis Illanes100% (1)
- Engineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionVon EverandEngineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNoch keine Bewertungen
- Term Exam 1 - QuestionsDokument8 SeitenTerm Exam 1 - Questionsamadeus135Noch keine Bewertungen
- Stability of Discrete Non-conservative SystemsVon EverandStability of Discrete Non-conservative SystemsBewertung: 1 von 5 Sternen1/5 (1)
- Sampleproblems FEDokument6 SeitenSampleproblems FEnial69100% (1)
- Stability Analysis Procedures - Theory and LimitationsDokument41 SeitenStability Analysis Procedures - Theory and LimitationsAndyra Jaiz BadduNoch keine Bewertungen
- FrictionDokument62 SeitenFrictionchellamvNoch keine Bewertungen
- 06 A Continuum Theory of Elastic Material SurfaceDokument10 Seiten06 A Continuum Theory of Elastic Material SurfaceBoonme ChinnaboonNoch keine Bewertungen
- CH 2. Strain Energy FunctionsDokument11 SeitenCH 2. Strain Energy FunctionsMaurice Lopez RavelNoch keine Bewertungen
- Immediate Deflection in Concrete BeamsDokument11 SeitenImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukNoch keine Bewertungen
- Example 3Dokument8 SeitenExample 3AlexanderNCNoch keine Bewertungen
- Example: Axial Load vs. Moment Interaction DiagramDokument44 SeitenExample: Axial Load vs. Moment Interaction DiagramAdnanNoch keine Bewertungen
- Fortran Code For Numerical Integration: Part-4Dokument6 SeitenFortran Code For Numerical Integration: Part-4N. T. DadlaniNoch keine Bewertungen
- Cyclic Triaxial Test: Cyclic Data Step 4 of 4Dokument5 SeitenCyclic Triaxial Test: Cyclic Data Step 4 of 4Rene KurniadiNoch keine Bewertungen
- Sidesway Web Buckling of Steel BeamsDokument12 SeitenSidesway Web Buckling of Steel BeamsYuth Yuthdanai100% (1)
- 1 Logarthmic - DecrementDokument5 Seiten1 Logarthmic - DecrementAnup PatilNoch keine Bewertungen
- Study Report On Implications of UnbondednessDokument19 SeitenStudy Report On Implications of UnbondednessFatima tuz ZohraNoch keine Bewertungen
- Strain Chap 04Dokument37 SeitenStrain Chap 04Ricardo ColosimoNoch keine Bewertungen
- Engineering Mechanics NotesDokument111 SeitenEngineering Mechanics NotesAtul GaurNoch keine Bewertungen
- Homework2 PDFDokument2 SeitenHomework2 PDFRobin Robertson100% (1)
- Analysis of Statically Indeterminate Indeterminate Structures by The Displacement MethodDokument30 SeitenAnalysis of Statically Indeterminate Indeterminate Structures by The Displacement MethoddomintoNoch keine Bewertungen
- 3 - Kinetics of Particle - Work & EnergyDokument33 Seiten3 - Kinetics of Particle - Work & EnergyIndroNoch keine Bewertungen
- Equilibrium: Summing All Forces in The X Direction Where FX The Body Force Per Unit VolumeDokument6 SeitenEquilibrium: Summing All Forces in The X Direction Where FX The Body Force Per Unit Volumebadr amNoch keine Bewertungen
- Non-Linear Seismic Response of Base-Isolated Liquid Storage Tanks To Bi-Directional ExcitationDokument20 SeitenNon-Linear Seismic Response of Base-Isolated Liquid Storage Tanks To Bi-Directional ExcitationAdolfo Valenzuela BustosNoch keine Bewertungen
- Rev Topic04 StructuralDynamicsofMDOFSystemsDokument125 SeitenRev Topic04 StructuralDynamicsofMDOFSystemsHAIDERFLOREZRAMOSNoch keine Bewertungen
- Rotating PendulumDokument12 SeitenRotating Pendulumjerome meccaNoch keine Bewertungen
- 6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesDokument14 Seiten6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesFrans Alen SarmientoNoch keine Bewertungen
- CH 5 Tutorial 2014Dokument4 SeitenCH 5 Tutorial 2014Luke LdhNoch keine Bewertungen
- Finite Element MethodsDokument14 SeitenFinite Element MethodspriyaankNoch keine Bewertungen
- Free Vibration of ParticlesDokument19 SeitenFree Vibration of ParticlesDavid AmachreeNoch keine Bewertungen
- Finite Element Method-Elements of Elasticity: BY ANJALI A (1211108) JEYAGOMATHI (1211136)Dokument23 SeitenFinite Element Method-Elements of Elasticity: BY ANJALI A (1211108) JEYAGOMATHI (1211136)Makesh Kumar100% (1)
- Structural Dynamics - SDOF - PpsDokument13 SeitenStructural Dynamics - SDOF - PpsSai KumarNoch keine Bewertungen
- From Structural Analysis To Finite Element MethodDokument25 SeitenFrom Structural Analysis To Finite Element MethodB S Praveen BspNoch keine Bewertungen
- Strain Energy Density FunctionDokument35 SeitenStrain Energy Density Functionsamir_ssh7151Noch keine Bewertungen
- Westergaard FormulaDokument7 SeitenWestergaard FormulashenNoch keine Bewertungen
- Homework4 PDFDokument2 SeitenHomework4 PDFRodolfo Angel Carrillo VelasquezNoch keine Bewertungen
- Finit Element Analysis MatlabDokument3 SeitenFinit Element Analysis MatlabAntehun MekonnenNoch keine Bewertungen
- Cyclic Threshold Strains in Clays Versus Sands and The Change of Secant Shear Modulus and Pore Water Pressure at Small Cyclic StrainsDokument243 SeitenCyclic Threshold Strains in Clays Versus Sands and The Change of Secant Shear Modulus and Pore Water Pressure at Small Cyclic Strainsjorge.jimenezNoch keine Bewertungen
- Review PDFDokument200 SeitenReview PDFbenicilloNoch keine Bewertungen
- 1974 - Matsuoka NakaiDokument12 Seiten1974 - Matsuoka NakaiMohdHilmyNaimNoch keine Bewertungen
- 10 Viscoelasticity 04 Hereditaory PDFDokument12 Seiten10 Viscoelasticity 04 Hereditaory PDFletter_ashish4444Noch keine Bewertungen
- Lecture Notes Math 4377/6308 - Advanced Linear Algebra I: Vaughn Climenhaga December 3, 2013Dokument145 SeitenLecture Notes Math 4377/6308 - Advanced Linear Algebra I: Vaughn Climenhaga December 3, 2013Irving JoséNoch keine Bewertungen
- 2 Wave EquationDokument34 Seiten2 Wave EquationSandeep Chaudhary100% (1)
- Theory of Elasticity Supplementary Notes: J. N. ReddyDokument52 SeitenTheory of Elasticity Supplementary Notes: J. N. ReddykkhemmoNoch keine Bewertungen
- Wilson 1990Dokument13 SeitenWilson 1990Sebastiao SilvaNoch keine Bewertungen
- 2 D ElementsDokument160 Seiten2 D Elementseafz111Noch keine Bewertungen
- CE 809 - Lecture 1 - Formulation of Mathematical Model of SDF SystemsDokument29 SeitenCE 809 - Lecture 1 - Formulation of Mathematical Model of SDF SystemsArslan UmarNoch keine Bewertungen
- Problem 1 1Dokument21 SeitenProblem 1 1Jingwei ZhongNoch keine Bewertungen
- Presentation # 1 CE 527 - Earthquake EngineeringDokument61 SeitenPresentation # 1 CE 527 - Earthquake EngineeringLawrence A. DyNoch keine Bewertungen
- 3-d ElasticityDokument40 Seiten3-d Elasticityp_sahoo8686Noch keine Bewertungen
- Mae (256F) - HW2 PDFDokument6 SeitenMae (256F) - HW2 PDFClaireNoch keine Bewertungen
- GROHE Pricelist-2020 en GB PDFDokument1.020 SeitenGROHE Pricelist-2020 en GB PDFNikhil AggarwalNoch keine Bewertungen
- Yamaha Outboard Carburetor KitsDokument4 SeitenYamaha Outboard Carburetor KitsMarine Parts ChinaNoch keine Bewertungen
- KennedyDokument4 SeitenKennedyMichael SalvahanNoch keine Bewertungen
- ASME Sec. VIII - Multiple Openings - Boiler and Pressure Vessel Engineering - Eng-TipsDokument4 SeitenASME Sec. VIII - Multiple Openings - Boiler and Pressure Vessel Engineering - Eng-TipsarjunNoch keine Bewertungen
- Low-Voltage Halogen Lamps Without Reflector: Product Family DatasheetDokument13 SeitenLow-Voltage Halogen Lamps Without Reflector: Product Family DatasheetparasprrmNoch keine Bewertungen
- OIDA Improved CarbonizerDokument14 SeitenOIDA Improved CarbonizerRicardo F. OrgeNoch keine Bewertungen
- Selected Bibliography On Brickmaking in Developing CountriesDokument4 SeitenSelected Bibliography On Brickmaking in Developing CountriesRobert PetrutNoch keine Bewertungen
- Data Sheet P30-2Dokument4 SeitenData Sheet P30-2Vlade NaumovskiNoch keine Bewertungen
- 33-50-14 (Epu301)Dokument30 Seiten33-50-14 (Epu301)BehroozNoch keine Bewertungen
- Physics: OxfordDokument224 SeitenPhysics: OxfordMusic Life100% (1)
- Regulateurs Europa Product GuideDokument13 SeitenRegulateurs Europa Product GuideJavierNoch keine Bewertungen
- MV Electrical TechnicianDokument1 SeiteMV Electrical TechnicianSundar ThangapandianNoch keine Bewertungen
- ATC E Bulletin 153E Final LR PDFDokument44 SeitenATC E Bulletin 153E Final LR PDFMax JunghannsNoch keine Bewertungen
- Radial Turbine Design ProcessDokument15 SeitenRadial Turbine Design ProcessKamaldeep GuptaNoch keine Bewertungen
- ME454Dokument3 SeitenME454jondhaleprashantmansubraoNoch keine Bewertungen
- Locomotive BoilerDokument32 SeitenLocomotive BoilerDr. BIBIN CHIDAMBARANATHANNoch keine Bewertungen
- Essentials of Economics, 10th Edition (2016)Dokument468 SeitenEssentials of Economics, 10th Edition (2016)Luis EstradaNoch keine Bewertungen
- Design and Fabrication of Stair Climber TrolleyDokument21 SeitenDesign and Fabrication of Stair Climber TrolleyAnonymous 1mMOyt9zNoch keine Bewertungen
- 0-2103471 Introduction To Engine DesignDokument85 Seiten0-2103471 Introduction To Engine DesignJulian DavidNoch keine Bewertungen
- Towards 100%: ISC Osaka, 2018 JAN 23Dokument62 SeitenTowards 100%: ISC Osaka, 2018 JAN 23taufanptrNoch keine Bewertungen
- Powerwall 2 AC Owners ManualDokument60 SeitenPowerwall 2 AC Owners ManualteslavanaNoch keine Bewertungen
- Seepex BT Range InstructionsDokument40 SeitenSeepex BT Range InstructionsАндрей СубботинNoch keine Bewertungen
- Diagnostic Study For Cement Mill OptimizationDokument9 SeitenDiagnostic Study For Cement Mill OptimizationHilmy MuhammadNoch keine Bewertungen
- VCA Evaporative Condenser Parts MapDokument2 SeitenVCA Evaporative Condenser Parts MapJunior Montalvo cruzNoch keine Bewertungen
- Brochure Ball Mills enDokument16 SeitenBrochure Ball Mills enmarviNoch keine Bewertungen
- AlphaESS M48112-SDokument2 SeitenAlphaESS M48112-SEben TeyeNoch keine Bewertungen
- 1735 KVA (1388 KW) Mitsubishi PDFDokument1 Seite1735 KVA (1388 KW) Mitsubishi PDFMd. Harunor RashidNoch keine Bewertungen
- Topic 1 Stoichiometric RelationshipsDokument56 SeitenTopic 1 Stoichiometric Relationshipsapi-546066323Noch keine Bewertungen
- IAEA Fukushima Remediation Final - Report151111Dokument81 SeitenIAEA Fukushima Remediation Final - Report151111EnformableNoch keine Bewertungen
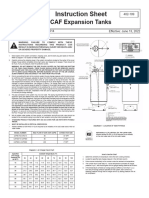
- Taco CAF Expansion Tank Install ManualDokument3 SeitenTaco CAF Expansion Tank Install ManualTEMPNoch keine Bewertungen
- ICH Quality Guidelines: An Implementation GuideVon EverandICH Quality Guidelines: An Implementation GuideAndrew TeasdaleNoch keine Bewertungen
- The Nature of Drugs Vol. 1: History, Pharmacology, and Social ImpactVon EverandThe Nature of Drugs Vol. 1: History, Pharmacology, and Social ImpactBewertung: 5 von 5 Sternen5/5 (5)
- Periodic Tales: A Cultural History of the Elements, from Arsenic to ZincVon EverandPeriodic Tales: A Cultural History of the Elements, from Arsenic to ZincBewertung: 3.5 von 5 Sternen3.5/5 (137)
- The Regenerative Grower's Guide to Garden Amendments: Using Locally Sourced Materials to Make Mineral and Biological Extracts and FermentsVon EverandThe Regenerative Grower's Guide to Garden Amendments: Using Locally Sourced Materials to Make Mineral and Biological Extracts and FermentsBewertung: 5 von 5 Sternen5/5 (3)
- Handbook of Formulating Dermal Applications: A Definitive Practical GuideVon EverandHandbook of Formulating Dermal Applications: A Definitive Practical GuideNoch keine Bewertungen
- Chemistry for Breakfast: The Amazing Science of Everyday LifeVon EverandChemistry for Breakfast: The Amazing Science of Everyday LifeBewertung: 4.5 von 5 Sternen4.5/5 (14)
- It's Elemental: The Hidden Chemistry in EverythingVon EverandIt's Elemental: The Hidden Chemistry in EverythingBewertung: 4 von 5 Sternen4/5 (10)
- Monkeys, Myths, and Molecules: Separating Fact from Fiction, and the Science of Everyday LifeVon EverandMonkeys, Myths, and Molecules: Separating Fact from Fiction, and the Science of Everyday LifeBewertung: 4 von 5 Sternen4/5 (1)
- AP® Chemistry Crash Course, For the 2020 Exam, Book + Online: Get a Higher Score in Less TimeVon EverandAP® Chemistry Crash Course, For the 2020 Exam, Book + Online: Get a Higher Score in Less TimeBewertung: 5 von 5 Sternen5/5 (1)
- Guidelines for Defining Process Safety Competency RequirementsVon EverandGuidelines for Defining Process Safety Competency RequirementsBewertung: 3 von 5 Sternen3/5 (1)
- The Production of Volatile Oils and Perfumery Plants in the United StatesVon EverandThe Production of Volatile Oils and Perfumery Plants in the United StatesNoch keine Bewertungen
- AP Chemistry Flashcards, Fourth Edition: Up-to-Date Review and PracticeVon EverandAP Chemistry Flashcards, Fourth Edition: Up-to-Date Review and PracticeNoch keine Bewertungen
- Chemistry for Breakfast: The Amazing Science of Everyday LifeVon EverandChemistry for Breakfast: The Amazing Science of Everyday LifeBewertung: 4.5 von 5 Sternen4.5/5 (90)
- Taste: Surprising Stories and Science About Why Food Tastes GoodVon EverandTaste: Surprising Stories and Science About Why Food Tastes GoodBewertung: 3 von 5 Sternen3/5 (20)
- The Nature of Drugs Vol. 1: History, Pharmacology, and Social ImpactVon EverandThe Nature of Drugs Vol. 1: History, Pharmacology, and Social ImpactBewertung: 5 von 5 Sternen5/5 (1)
- The Periodic Table: A Very Short IntroductionVon EverandThe Periodic Table: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The Billion-Dollar Molecule: The Quest for the Perfect DrugVon EverandThe Billion-Dollar Molecule: The Quest for the Perfect DrugBewertung: 5 von 5 Sternen5/5 (2)
- Is That a Fact?: Frauds, Quacks, and the Real Science of Everyday LifeVon EverandIs That a Fact?: Frauds, Quacks, and the Real Science of Everyday LifeBewertung: 5 von 5 Sternen5/5 (4)
- Essential Chemistry for Formulators of Semisolid and Liquid DosagesVon EverandEssential Chemistry for Formulators of Semisolid and Liquid DosagesBewertung: 5 von 5 Sternen5/5 (2)