Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- D&T Department Handbook 2014 05112014Dokument83 SeitenD&T Department Handbook 2014 05112014designmra100% (1)
- Furse Earthing CatalogueDokument28 SeitenFurse Earthing CatalogueJef N-Swing100% (2)
- DELF B1 Exam Preparation Course Online PDFDokument2 SeitenDELF B1 Exam Preparation Course Online PDFYuli Sentana50% (2)
- Outdooreducationcourseoutline2016 17 WeberDokument5 SeitenOutdooreducationcourseoutline2016 17 Weberapi-193750204Noch keine Bewertungen
- FC5 - : Name Data Type Address CommentDokument2 SeitenFC5 - : Name Data Type Address Commentcontact_egypt2Noch keine Bewertungen
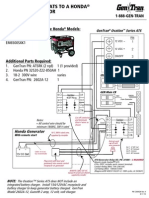
- Ovation HondaPortable5300028A 5300017FDokument2 SeitenOvation HondaPortable5300028A 5300017Fcontact_egypt2Noch keine Bewertungen
- FB2 - : Name Data Type Address Initial Value CommentDokument11 SeitenFB2 - : Name Data Type Address Initial Value Commentcontact_egypt2Noch keine Bewertungen
- FC1 - : Name Data Type Address CommentDokument10 SeitenFC1 - : Name Data Type Address Commentcontact_egypt2Noch keine Bewertungen
- At S Generator Wiring DiagramsDokument4 SeitenAt S Generator Wiring Diagramscontact_egypt2Noch keine Bewertungen
- Blades Power Engine Control PanelDokument2 SeitenBlades Power Engine Control Panelcontact_egypt2Noch keine Bewertungen
- Ettg 08Dokument3 SeitenEttg 08contact_egypt2Noch keine Bewertungen
- UCPDokument0 SeitenUCPcontact_egypt2Noch keine Bewertungen
- Item Reference Description Qty.: PCB Design Module Ref: 0299Dokument1 SeiteItem Reference Description Qty.: PCB Design Module Ref: 0299contact_egypt2Noch keine Bewertungen
- Objectives: - Terminology - Definitions: System Elements and Block Diagrams - Automatic ControlDokument9 SeitenObjectives: - Terminology - Definitions: System Elements and Block Diagrams - Automatic Controlcontact_egypt2Noch keine Bewertungen
- Electronics Training Course 1Dokument32 SeitenElectronics Training Course 1contact_egypt2Noch keine Bewertungen
- Matlab GaDokument15 SeitenMatlab Gagreenday3Noch keine Bewertungen
- In-Diya PV LED LampsDokument2 SeitenIn-Diya PV LED Lampscontact_egypt2Noch keine Bewertungen
- Controlling CM Sized Autonomous Micro Robots Operating in The Micro and Nano WorldDokument8 SeitenControlling CM Sized Autonomous Micro Robots Operating in The Micro and Nano Worldcontact_egypt2Noch keine Bewertungen
- 5 Zone Alarm System1Dokument1 Seite5 Zone Alarm System1contact_egypt2Noch keine Bewertungen
- Abb Technical Guide Us102 Motor Cable LengthsDokument32 SeitenAbb Technical Guide Us102 Motor Cable LengthsCristhJuliangNoch keine Bewertungen
- Adult Learner Autonomy ChecklistDokument7 SeitenAdult Learner Autonomy ChecklistCharles Rei100% (1)
- Ricky Eka SDokument6 SeitenRicky Eka SShafiq AzliNoch keine Bewertungen
- Tor UndergradDokument1 SeiteTor UndergradCardoNoch keine Bewertungen
- STR-683 Course Description 2016Dokument2 SeitenSTR-683 Course Description 2016Hossam KamalNoch keine Bewertungen
- Dotmocracy HandbookDokument54 SeitenDotmocracy Handbookorestisv100% (1)
- High School Unit PlanDokument5 SeitenHigh School Unit Planapi-254413107Noch keine Bewertungen
- Group Facilitation Project Processing and Individual ReflectionDokument2 SeitenGroup Facilitation Project Processing and Individual Reflectionapi-393918948Noch keine Bewertungen
- 01 - Course Outline - Drama 11Dokument2 Seiten01 - Course Outline - Drama 11api-266142012Noch keine Bewertungen
- Nick Hoss Reading ListDokument19 SeitenNick Hoss Reading ListKaps RamburnNoch keine Bewertungen
- Ezy Math Tutoring - Year 3 AnswersDokument95 SeitenEzy Math Tutoring - Year 3 AnswersVincents Genesius EvansNoch keine Bewertungen
- Review Job ApplicationDokument4 SeitenReview Job Applicationaghel avensiNoch keine Bewertungen
- Venkat CVDokument3 SeitenVenkat CVvizay237_430788222Noch keine Bewertungen
- AdprevDokument11 SeitenAdprevreixNoch keine Bewertungen
- Cost Accounting Vol II PDFDokument464 SeitenCost Accounting Vol II PDFAnonymous qAegy6G100% (2)
- Chad Lesson Plan Curt Radford Observation 3Dokument4 SeitenChad Lesson Plan Curt Radford Observation 3api-364666265Noch keine Bewertungen
- Writing Lesson Plan For A KSSR ClassDokument5 SeitenWriting Lesson Plan For A KSSR ClassZul4Noch keine Bewertungen
- English Proficiency Level of Grade 12 StudentsDokument2 SeitenEnglish Proficiency Level of Grade 12 StudentsJay Mark Cada ArreNoch keine Bewertungen
- Law Exams - Question Paper - Uttarakhand HJS (Pre) 2011 - Uttarakhand Higher Judicial Service (Pre) Exam 2011Dokument5 SeitenLaw Exams - Question Paper - Uttarakhand HJS (Pre) 2011 - Uttarakhand Higher Judicial Service (Pre) Exam 2011Fayaz Alam100% (2)
- RA 10157 Kindergarten Education ActDokument27 SeitenRA 10157 Kindergarten Education Actche Cab100% (1)
- Reading Between The LinesDokument250 SeitenReading Between The LinesVijay Anand100% (1)
- Antwerp Management SchoolDokument12 SeitenAntwerp Management SchoolvinodNoch keine Bewertungen
- Job Options For Returnees and DeporteesDokument9 SeitenJob Options For Returnees and DeporteesDream MexicoNoch keine Bewertungen
- Platt CV March13Dokument6 SeitenPlatt CV March13Julie AlexanderNoch keine Bewertungen
- The Ielts Academic Speaking Test TutorialDokument5 SeitenThe Ielts Academic Speaking Test TutorialNadeemShahNoch keine Bewertungen
- Letter H Lesson PlanDokument4 SeitenLetter H Lesson Planapi-317358702100% (1)
- Nota Chapter 4 Perception Attribution and Management of DiversityDokument17 SeitenNota Chapter 4 Perception Attribution and Management of DiversitySue AhmadNoch keine Bewertungen
- Vision Vancouver Platform 2011Dokument30 SeitenVision Vancouver Platform 2011The Georgia StraightNoch keine Bewertungen