Das könnte Ihnen auch gefallen
- How To Write FSM Is VerilogDokument8 SeitenHow To Write FSM Is VerilogAyaz MohammedNoch keine Bewertungen
- SystemVerilog Scheduling Semantics - Verification GuideDokument4 SeitenSystemVerilog Scheduling Semantics - Verification Guidearchana pandeyNoch keine Bewertungen
- FSM in SV-classDokument13 SeitenFSM in SV-classkunaraj75% (4)
- Adv Verif Topics Book Final-ACCELERATIONDokument25 SeitenAdv Verif Topics Book Final-ACCELERATIONcoolkad81Noch keine Bewertungen
- Course Uvm-Framework Session17 Code-Generation-Guidelines BodenDokument36 SeitenCourse Uvm-Framework Session17 Code-Generation-Guidelines BodenQuý Trương QuangNoch keine Bewertungen
- Sva FV Tutorial HVC2013Dokument118 SeitenSva FV Tutorial HVC2013passep08Noch keine Bewertungen
- Ethernet Testbench SVDokument31 SeitenEthernet Testbench SVsansm20083184Noch keine Bewertungen
- Unveil The Mystery of Code Coverage in Low-Power Designs: Achieving Power AwareDokument13 SeitenUnveil The Mystery of Code Coverage in Low-Power Designs: Achieving Power AwareNishit GuptaNoch keine Bewertungen
- SystemVerilog - 07 (Verification) Threads and Interprocess Communication (v05!01!2013)Dokument48 SeitenSystemVerilog - 07 (Verification) Threads and Interprocess Communication (v05!01!2013)abh_z100% (1)
- DVClub Advanced Scoreboarding Techniques-FrancoisDokument23 SeitenDVClub Advanced Scoreboarding Techniques-Francoiscoolkad81Noch keine Bewertungen
- UVM Interview Questions VLSI Encyclopedia PDFDokument7 SeitenUVM Interview Questions VLSI Encyclopedia PDFQuastnNoch keine Bewertungen
- System Verilog Overview-IbmDokument56 SeitenSystem Verilog Overview-IbmABHAYNoch keine Bewertungen
- Snug Boston2013 Paper56 SlidesDokument31 SeitenSnug Boston2013 Paper56 Slidesjupiter8053Noch keine Bewertungen
- Soc Verification StrategyDokument2 SeitenSoc Verification StrategyDebashis100% (2)
- 1442 - Reusable and Scalable Verification Solutions For Designing AIML SoCsDokument34 Seiten1442 - Reusable and Scalable Verification Solutions For Designing AIML SoCsAnh Dung LeNoch keine Bewertungen
- Uvm Systemc Language Reference ManualDokument253 SeitenUvm Systemc Language Reference Manualsuman kumar reddyNoch keine Bewertungen
- Block Diagram of Intel Atom ProcessorDokument23 SeitenBlock Diagram of Intel Atom Processorfestio94Noch keine Bewertungen
- UVM Verification of An I2C Master Core PDFDokument144 SeitenUVM Verification of An I2C Master Core PDFAtul100% (1)
- Universal Serial Bus System ArchitectureDokument285 SeitenUniversal Serial Bus System ArchitecturepriyajeejoNoch keine Bewertungen
- 1 - Testbench Guide For OVMDokument42 Seiten1 - Testbench Guide For OVMabhipankajNoch keine Bewertungen
- Verification Approach For ASIC Generic IP Functional VerificationDokument3 SeitenVerification Approach For ASIC Generic IP Functional VerificationMohammad Seemab AslamNoch keine Bewertungen
- 15 SVAssertionsLecture1Dokument20 Seiten15 SVAssertionsLecture1Mihaela ScanteianuNoch keine Bewertungen
- Verilab Dvcon Tutorial ADokument138 SeitenVerilab Dvcon Tutorial Ahimabindu2305Noch keine Bewertungen
- Systemverilog For Design and Verification: Engineer Explorer SeriesDokument486 SeitenSystemverilog For Design and Verification: Engineer Explorer Seriesvinay100% (1)
- 2016-DVClub-PDX Adopting Uvm SeminarDokument18 Seiten2016-DVClub-PDX Adopting Uvm SeminarspaulsNoch keine Bewertungen
- MGC DVCon 13 Sequence Sequence On The Wall Who's The Fairest of Them AllDokument24 SeitenMGC DVCon 13 Sequence Sequence On The Wall Who's The Fairest of Them AllNivaz ChockkalingamNoch keine Bewertungen
- Assertion AxiDokument42 SeitenAssertion AxiSuvendra Sahoo0% (1)
- Dma ControllerDokument166 SeitenDma ControllerpraveenbhongiriNoch keine Bewertungen
- 07 AceVerification SystemVerilog Nov2005Dokument17 Seiten07 AceVerification SystemVerilog Nov2005prabhuasbNoch keine Bewertungen
- What Is Setup and Hold Time?Dokument12 SeitenWhat Is Setup and Hold Time?Minu MathewNoch keine Bewertungen
- Gaisler Research IP LibraryDokument1.055 SeitenGaisler Research IP LibraryrazvanvgNoch keine Bewertungen
- SVDokument420 SeitenSVGnanaSai DattatreyaNoch keine Bewertungen
- AVMSVI-04 - Automating Testbench Tasks With TCLDokument26 SeitenAVMSVI-04 - Automating Testbench Tasks With TCLGurinder Pal SinghNoch keine Bewertungen
- Efficient Methods For Analog Mixed Signal Verification - Interface Handling Methods, Trade-Offs and Guidelines PDFDokument38 SeitenEfficient Methods For Analog Mixed Signal Verification - Interface Handling Methods, Trade-Offs and Guidelines PDFTitan FredNoch keine Bewertungen
- SV-UVM of AXI - WBDokument4 SeitenSV-UVM of AXI - WBRahul HanaNoch keine Bewertungen
- SystemVerilog 3.0d.VCS7.1 Beta PDFDokument314 SeitenSystemVerilog 3.0d.VCS7.1 Beta PDFlaurent_pubsNoch keine Bewertungen
- Introduction in Uvm: Daian Stein Junior Verification and Design Engineer at Ethergate Polytehnic University of TimisoaraDokument34 SeitenIntroduction in Uvm: Daian Stein Junior Verification and Design Engineer at Ethergate Polytehnic University of TimisoaraStein Daian100% (1)
- Design Verification Engineer RTL in Austin TX Resume Sumaira KhowajaDokument3 SeitenDesign Verification Engineer RTL in Austin TX Resume Sumaira KhowajaSumairaKhowaja4Noch keine Bewertungen
- Amba 3 Axi Protocol Checker: User GuideDokument58 SeitenAmba 3 Axi Protocol Checker: User GuidepriyajeejoNoch keine Bewertungen
- VerilogDokument226 SeitenVerilogNadeem AkramNoch keine Bewertungen
- AHBDokument59 SeitenAHBGautham Lukkur Venugopal50% (2)
- UVM-ML Quick Start Guide: 31 July, 2014Dokument21 SeitenUVM-ML Quick Start Guide: 31 July, 2014mithungnNoch keine Bewertungen
- Cadence Uv M Debug SlidesDokument34 SeitenCadence Uv M Debug SlidesBharathwajan ParthasarathyNoch keine Bewertungen
- 2015 DVClub Austin - SVA Tutorial - and - SVA Planning PDFDokument39 Seiten2015 DVClub Austin - SVA Tutorial - and - SVA Planning PDFgideontargrave7Noch keine Bewertungen
- SystemVerilog Verification Sanjay MunjalDokument35 SeitenSystemVerilog Verification Sanjay MunjalSanjay MunjalNoch keine Bewertungen
- Axi BFMDokument85 SeitenAxi BFMIgor AmosovNoch keine Bewertungen
- Verification of Driver Logic Using Ambaaxi UvmDokument10 SeitenVerification of Driver Logic Using Ambaaxi UvmAnonymous e4UpOQEPNoch keine Bewertungen
- Uvm EventsDokument10 SeitenUvm Eventsnaresh_sambhnani5702Noch keine Bewertungen
- RTL Coding Styles That Yield Simulation and Synthesis MismatchesDokument15 SeitenRTL Coding Styles That Yield Simulation and Synthesis Mismatchesajaysimha_vlsiNoch keine Bewertungen
- Application-Specific Integrated Circuit ASIC A Complete GuideVon EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNoch keine Bewertungen
- ASIC and FPGA Verification: A Guide to Component ModelingVon EverandASIC and FPGA Verification: A Guide to Component ModelingBewertung: 5 von 5 Sternen5/5 (1)
- What Is Callback?: Systemverilog&Uvm Interview QuestionsDokument53 SeitenWhat Is Callback?: Systemverilog&Uvm Interview QuestionsAshwini Patil100% (1)
- Systemverilog Interview QuestionsDokument31 SeitenSystemverilog Interview QuestionsDivya Dm100% (1)
- System Ver I LogDokument8 SeitenSystem Ver I LogElisha KirklandNoch keine Bewertungen
- Chapter10 VerilogDokument62 SeitenChapter10 VerilogdilipbagadiNoch keine Bewertungen
- Test BenchDokument17 SeitenTest BenchkunarajNoch keine Bewertungen
- Synthesizable Finite State Machine Design Techniques Using The New Systemverilog 3.0 EnhancementsDokument53 SeitenSynthesizable Finite State Machine Design Techniques Using The New Systemverilog 3.0 EnhancementsammankumarNoch keine Bewertungen
- System VerilogDokument44 SeitenSystem VerilogSonu AgarwalNoch keine Bewertungen
- SV InterfaceDokument13 SeitenSV InterfacekunarajNoch keine Bewertungen
- System Verilog Quick RefDokument133 SeitenSystem Verilog Quick Refraghavendra100% (5)
- SV VMM TBDokument31 SeitenSV VMM TBkunarajNoch keine Bewertungen
- Assertions in Systemverilog: A Unified Language For More Efficient VerificationDokument15 SeitenAssertions in Systemverilog: A Unified Language For More Efficient VerificationkunarajNoch keine Bewertungen
- Cs2202 ANNA UNIV Question Paper 1Dokument3 SeitenCs2202 ANNA UNIV Question Paper 1kunarajNoch keine Bewertungen
- Vlsi Design U2 - Part2 - 1Dokument13 SeitenVlsi Design U2 - Part2 - 1kunarajNoch keine Bewertungen
- Question Paper Code:: Reg. No.Dokument3 SeitenQuestion Paper Code:: Reg. No.kunarajNoch keine Bewertungen
- SystemVerilog TutorialDokument21 SeitenSystemVerilog Tutorialvaibhav_pandey_34Noch keine Bewertungen
- B.E./B.Tech. DEGREE EXAMINATION, November-2009: Ma2211 - Transforms and Partial Differential Equations M Q P - IDokument45 SeitenB.E./B.Tech. DEGREE EXAMINATION, November-2009: Ma2211 - Transforms and Partial Differential Equations M Q P - IkunarajNoch keine Bewertungen
- Question Paper Code:: Reg. No.Dokument2 SeitenQuestion Paper Code:: Reg. No.kunarajNoch keine Bewertungen
- Digital Principles and System DesignDokument31 SeitenDigital Principles and System DesignManoj KumarNoch keine Bewertungen
- Cs2202 ANNA UNIV Question Paper 2Dokument3 SeitenCs2202 ANNA UNIV Question Paper 2kunarajNoch keine Bewertungen
- QBank DPSD cs2202Dokument6 SeitenQBank DPSD cs2202kunarajNoch keine Bewertungen
- Digital Electronics Ec 1201Dokument34 SeitenDigital Electronics Ec 1201ainugiri100% (1)
- Ec 1312 Digital Logic CircuitsDokument12 SeitenEc 1312 Digital Logic CircuitskunarajNoch keine Bewertungen
- Cs2202 ANNA UNIV Question Paper 1Dokument3 SeitenCs2202 ANNA UNIV Question Paper 1kunarajNoch keine Bewertungen
- LIC Lab ManualDokument102 SeitenLIC Lab Manualkunaraj100% (2)
- DPSD Internal 1 SolutionDokument9 SeitenDPSD Internal 1 SolutionkunarajNoch keine Bewertungen
- EDC 2 Marks Q ADokument16 SeitenEDC 2 Marks Q Akunaraj100% (3)
- Engineering Practices Lab ManualDokument70 SeitenEngineering Practices Lab Manualkunaraj86% (7)
- Digital Electronics Lab ManualDokument108 SeitenDigital Electronics Lab Manualkunaraj88% (17)
- Electronic Circuits I Lab ManualDokument44 SeitenElectronic Circuits I Lab Manualkunaraj100% (7)
- Learning Spring Application Development - Sample ChapterDokument35 SeitenLearning Spring Application Development - Sample ChapterPackt Publishing100% (1)
- AOP in RubyDokument39 SeitenAOP in RubyLuis Enrique Alvarez BareaNoch keine Bewertungen
- Spring Mock Test IIDokument11 SeitenSpring Mock Test IIdiegoNoch keine Bewertungen
- Aspectj TutorialDokument101 SeitenAspectj TutorialvidyaNoch keine Bewertungen
- Spring ReferenceDokument833 SeitenSpring ReferenceIstván TóthNoch keine Bewertungen
- AOP 101: Intro To Aspect Oriented Programming: Ernest HillDokument47 SeitenAOP 101: Intro To Aspect Oriented Programming: Ernest HillSaiprasadBejgamNoch keine Bewertungen
- Pressman CH 3 Prescriptive Process ModelsDokument36 SeitenPressman CH 3 Prescriptive Process ModelsPriyadarshini NNoch keine Bewertungen
- Developer Guide: Alfresco Content Services 6.2Dokument69 SeitenDeveloper Guide: Alfresco Content Services 6.2Habu UsmanNoch keine Bewertungen
- Milton Cash Advanced Software Engineering Learning Press 2012Dokument83 SeitenMilton Cash Advanced Software Engineering Learning Press 2012Ara Jane RoxasNoch keine Bewertungen
- 1.3 Perspective and Specialized ProcessDokument49 Seiten1.3 Perspective and Specialized ProcessMohamed BilalNoch keine Bewertungen
- Contracts For Java: A Practical Framework For Contract ProgrammingDokument16 SeitenContracts For Java: A Practical Framework For Contract Programmingsagarv48Noch keine Bewertungen
- Event Management System Design and ImplementationDokument11 SeitenEvent Management System Design and ImplementationRatan DeepNoch keine Bewertungen
- Engineering Practices For Building Quality SoftwareDokument127 SeitenEngineering Practices For Building Quality Softwaresurathu naveenNoch keine Bewertungen
- Cucumber With Spring BootDokument97 SeitenCucumber With Spring BootsoltztezeNoch keine Bewertungen
- Lec#2 Software EngineeringDokument67 SeitenLec#2 Software EngineeringHamza AbbasiNoch keine Bewertungen
- Spring AOP ExampleDokument7 SeitenSpring AOP ExampleGhanendra PiplaniNoch keine Bewertungen
- SCID (Source Code in Database)Dokument15 SeitenSCID (Source Code in Database)Charles AlstonNoch keine Bewertungen
- Ejercicios (001 100)Dokument100 SeitenEjercicios (001 100)josedaappNoch keine Bewertungen
- Spring Framework Questions Part 1 What Is Spring Framework?Dokument12 SeitenSpring Framework Questions Part 1 What Is Spring Framework?Satish BabuNoch keine Bewertungen
- Domain Driven Design and Development in PracticeDokument26 SeitenDomain Driven Design and Development in PracticeBehzad KeyghobadiNoch keine Bewertungen
- Hands High Performance Spring 5Dokument620 SeitenHands High Performance Spring 5sefsdfdfNoch keine Bewertungen
- Spring Framework 3.0: - Prakash BadheDokument154 SeitenSpring Framework 3.0: - Prakash BadheAmarjeet SinghNoch keine Bewertungen
- Asynchronous Programming in Java - BaeldungDokument6 SeitenAsynchronous Programming in Java - BaeldungFernando Aramis ColqueNoch keine Bewertungen
- Chapter 8 - Aspect-Oriented Software Engineering (Lecture 11)Dokument20 SeitenChapter 8 - Aspect-Oriented Software Engineering (Lecture 11)abreham ashebir100% (1)
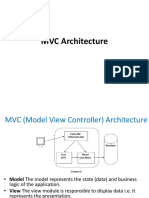
- MVC ArchitectureDokument62 SeitenMVC ArchitectureDinesh CNoch keine Bewertungen
- Introduction To Spring Framework and Dependency Injection: Aaron ZeckoskiDokument31 SeitenIntroduction To Spring Framework and Dependency Injection: Aaron ZeckoskiAbhijitNoch keine Bewertungen
- Spring Interview QuestionsDokument17 SeitenSpring Interview QuestionsPRABHU SORTURNoch keine Bewertungen
- Client Transparent Proxy Message Sink LogbookDokument45 SeitenClient Transparent Proxy Message Sink LogbooklamkakakaNoch keine Bewertungen
- There Are 4 Types of Specialized Process ModelDokument3 SeitenThere Are 4 Types of Specialized Process ModelConselvien Juno Limson Asoy100% (1)
- Core Spring and MVCDokument771 SeitenCore Spring and MVCRuphachowdury Kandyal67% (3)