Das könnte Ihnen auch gefallen
- FormationSW2007 09-10Dokument53 SeitenFormationSW2007 09-10فدوى غانيNoch keine Bewertungen
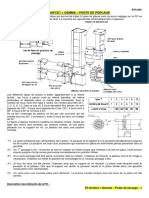
- TD2 Gemma PDFDokument3 SeitenTD2 Gemma PDFyousef ouasfia100% (1)
- Robotics Course DynamicsDokument30 SeitenRobotics Course Dynamicshocine benmaizaNoch keine Bewertungen
- Sujet1 Robotique AitlahcenDokument4 SeitenSujet1 Robotique AitlahcenCaptain Teddy BearNoch keine Bewertungen
- 2GSM TP Robotique 20 21Dokument8 Seiten2GSM TP Robotique 20 21LOUTFI BELLANoch keine Bewertungen
- Bras ManipulateurDokument34 SeitenBras ManipulateurOussama AhakkarNoch keine Bewertungen
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Dokument5 SeitenRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDONoch keine Bewertungen
- TP Delmia Esstin V5Dokument40 SeitenTP Delmia Esstin V5Sergio Angarita SNoch keine Bewertungen
- 01 Programmmation CNCDokument113 Seiten01 Programmmation CNCAmeni KhaledNoch keine Bewertungen
- Exam Robotique AITLAHCENDokument5 SeitenExam Robotique AITLAHCENCaptain Teddy BearNoch keine Bewertungen
- TP4-Vibration Mécanique-AM Sous Catia V5Dokument11 SeitenTP4-Vibration Mécanique-AM Sous Catia V5Omar BenadirNoch keine Bewertungen
- TP Modele GeometriqueDokument8 SeitenTP Modele GeometriqueAmine EL FERHANINoch keine Bewertungen
- Support de Cours Robotique IndustrielleDokument57 SeitenSupport de Cours Robotique IndustrielleJeremie gbogboNoch keine Bewertungen
- Cours de Robotique-V3-18-12-2018Dokument51 SeitenCours de Robotique-V3-18-12-2018Omar 95Noch keine Bewertungen
- MGD ScaraDokument7 SeitenMGD ScaraKara RedaNoch keine Bewertungen
- Robotique TD1 PDFDokument1 SeiteRobotique TD1 PDFbobzoo100% (1)
- TP TournageDokument3 SeitenTP TournageHajar Oumnas100% (1)
- TD 2 - 2021Dokument2 SeitenTD 2 - 2021hiba gribaNoch keine Bewertungen
- Chap 4 TOURNAGE FRAISAGE PDFDokument3 SeitenChap 4 TOURNAGE FRAISAGE PDFAmer ChaffaiNoch keine Bewertungen
- Chapitre-Introduction Aux Systèmes MécatroniquesDokument8 SeitenChapitre-Introduction Aux Systèmes Mécatroniquesoussama jouiniNoch keine Bewertungen
- Chapitre3 Robotique 2017Dokument45 SeitenChapitre3 Robotique 2017imene titaNoch keine Bewertungen
- Ci3 TDDokument5 SeitenCi3 TDNibrasse Saidani100% (2)
- Exposé1Dokument21 SeitenExposé1Youcef IslemNoch keine Bewertungen
- Chapitre 2Dokument17 SeitenChapitre 2Oussama AbirNoch keine Bewertungen
- Sma Rma Ch08-V01 ModcindirDokument22 SeitenSma Rma Ch08-V01 Modcindiragrebi mohamedNoch keine Bewertungen
- TD1 ContinuDokument4 SeitenTD1 Continudhaouadi hazemNoch keine Bewertungen
- 2799 22 Optimisation Des Parametres de CoupeDokument6 Seiten2799 22 Optimisation Des Parametres de CoupeSLIMANE BENCHIHEUB50% (2)
- TP Robotique SALEH ShawkiDokument20 SeitenTP Robotique SALEH ShawkiIlyas khadrouniNoch keine Bewertungen
- SimulationDokument11 SeitenSimulationmoulaye cherifNoch keine Bewertungen
- Exam Robotique 07Dokument2 SeitenExam Robotique 07khadija lamrabetNoch keine Bewertungen
- Slides Cinématique Robots SériesDokument31 SeitenSlides Cinématique Robots SériesMbaira LeilaNoch keine Bewertungen
- Cours RobotiqueDokument85 SeitenCours RobotiqueHassan Hallaoua43% (7)
- Seance 4 2016 2017 V2Dokument15 SeitenSeance 4 2016 2017 V2YounessElkarkouriNoch keine Bewertungen
- 08 - TD TPM TRSDokument5 Seiten08 - TD TPM TRSsor_68mNoch keine Bewertungen
- Analyse Fonctionnelle ExercicescorDokument5 SeitenAnalyse Fonctionnelle ExercicescorIteb Essaraj50% (2)
- Sujet ScaraDokument2 SeitenSujet ScarasdfgjbNoch keine Bewertungen
- Rapport Fin D'etudeDokument75 SeitenRapport Fin D'etudehamza gaceurNoch keine Bewertungen
- Bras ManipulateurDokument12 SeitenBras ManipulateurLiebherrNoch keine Bewertungen
- TD N°2 Maintenance - CNDDokument2 SeitenTD N°2 Maintenance - CNDHB RIMNoch keine Bewertungen
- TD Robotique Aiac 2020 2021Dokument8 SeitenTD Robotique Aiac 2020 2021Captain Teddy BearNoch keine Bewertungen
- TD Robotique MCDDokument1 SeiteTD Robotique MCDhocine benmaizaNoch keine Bewertungen
- TP 03Dokument4 SeitenTP 03bobzoo100% (1)
- Robotique IndusDokument103 SeitenRobotique IndusHichem Hamdi100% (2)
- Les Douille À Billes PDFDokument50 SeitenLes Douille À Billes PDFNadia DridiNoch keine Bewertungen
- Bond GraphsDokument77 SeitenBond Graphszaid oumaimaNoch keine Bewertungen
- Cours RobotiqueDokument82 SeitenCours RobotiqueWided Maghraoui100% (1)
- Présentation de Stage Technicien Chez Amec ExportDokument14 SeitenPrésentation de Stage Technicien Chez Amec ExportMaher Garfa100% (1)
- Corrigé Examen 2022Dokument4 SeitenCorrigé Examen 2022Hamame Mohamed AmineNoch keine Bewertungen
- Rapport CNCDokument10 SeitenRapport CNChajarisoNoch keine Bewertungen
- Corrigé Examen Terminal CFAO M1 CM 2017Dokument1 SeiteCorrigé Examen Terminal CFAO M1 CM 2017Salim RezkiNoch keine Bewertungen
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Von EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Noch keine Bewertungen
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesVon EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesNoch keine Bewertungen
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsVon EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsNoch keine Bewertungen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- Table ZDokument4 SeitenTable ZRad GhrNoch keine Bewertungen
- Projet Robotique PDFDokument16 SeitenProjet Robotique PDFAichaELJafoufi100% (3)
- Lois de Probabilites Et Tables QueDokument8 SeitenLois de Probabilites Et Tables QueViviane EyeaNoch keine Bewertungen
- 12 SINTEZA - Formule TrigonometrieDokument13 Seiten12 SINTEZA - Formule TrigonometrieRebecca DuncaNoch keine Bewertungen
- Derivate Ed Integrali (Tabella Riassuntiva Regole)Dokument8 SeitenDerivate Ed Integrali (Tabella Riassuntiva Regole)lucad86Noch keine Bewertungen
- Adc - Ps Annexes - MathsDokument11 SeitenAdc - Ps Annexes - MathsMonCf MerrNoch keine Bewertungen
- IntegrationDokument2 SeitenIntegrationYacine BoulbotNoch keine Bewertungen
- Applique LED Sten Dimmable Par Commande Gestuelle Luminaire - FR 2Dokument1 SeiteApplique LED Sten Dimmable Par Commande Gestuelle Luminaire - FR 2fredy.numero1Noch keine Bewertungen
- Dsi Pieux Battus Dywidag en Fonte Ductile FR 1Dokument16 SeitenDsi Pieux Battus Dywidag en Fonte Ductile FR 1Mohamed KanzoutNoch keine Bewertungen
- 5 - Essais de tirantsTA2020 - PMercierHScheryDokument16 Seiten5 - Essais de tirantsTA2020 - PMercierHScherybouraadahakimNoch keine Bewertungen
- Calcul Vitesse de FraisageDokument3 SeitenCalcul Vitesse de FraisageMxScribdNoch keine Bewertungen
- GHEGHISSI NaymeDokument106 SeitenGHEGHISSI NaymemimijuniorNoch keine Bewertungen
- TP SprintDokument9 SeitenTP Sprintyvanlionel71Noch keine Bewertungen
- Evaluation Des Parts Sociales de Sci Par PH Favre Reguillon Ajdi 02 20171Dokument4 SeitenEvaluation Des Parts Sociales de Sci Par PH Favre Reguillon Ajdi 02 20171mlachenal5237Noch keine Bewertungen
- Clasification Des Section Transversale PDFDokument31 SeitenClasification Des Section Transversale PDFMehallaine BrahimNoch keine Bewertungen
- ListeCommandesShellWindows PDFDokument4 SeitenListeCommandesShellWindows PDFamissproNoch keine Bewertungen
- BallumageDokument10 SeitenBallumagesylvaliveNoch keine Bewertungen
- Rapport Myrtel QualiprimDokument27 SeitenRapport Myrtel Qualiprimkramhassan969Noch keine Bewertungen
- Rapport Geotechnique - Stations de PompageDokument14 SeitenRapport Geotechnique - Stations de Pompagefouad.zehouani1987Noch keine Bewertungen
- Urbanisme OperationnelDokument10 SeitenUrbanisme OperationnelIva IzdalekaNoch keine Bewertungen
- Presentation On Colgate 3Dokument15 SeitenPresentation On Colgate 3Ngosa MusengeNoch keine Bewertungen
- Dictionnairede Gestion en CHRDokument374 SeitenDictionnairede Gestion en CHROaj YassineNoch keine Bewertungen
- Poly Anum Optim 14Dokument150 SeitenPoly Anum Optim 14Jose ToliviaNoch keine Bewertungen
- InPower Rév4Dokument161 SeitenInPower Rév4denysNoch keine Bewertungen
- Projet Master 1Dokument11 SeitenProjet Master 1nadjib sallatNoch keine Bewertungen
- 806 RCM 2018 11Dokument84 Seiten806 RCM 2018 11Helmi TouelNoch keine Bewertungen
- Exposé Mediation M. MaatoukDokument33 SeitenExposé Mediation M. MaatoukAtae Mstfa100% (1)
- General Catalogue Friulsider 2013Dokument370 SeitenGeneral Catalogue Friulsider 2013Eric PerezNoch keine Bewertungen
- Introduction Droit Des ContratsDokument5 SeitenIntroduction Droit Des ContratsCorinne BrugiereNoch keine Bewertungen
- TD Comptabilite Analytique 1-2022-2023Dokument13 SeitenTD Comptabilite Analytique 1-2022-2023Soma Ben CherifNoch keine Bewertungen
- Banques Participatives Maroc PDFDokument2 SeitenBanques Participatives Maroc PDFjuanNoch keine Bewertungen
- Description Et Etat D'exploitation de Quelques Espèces À Haute Valeur Dans Le Sud CamerounDokument29 SeitenDescription Et Etat D'exploitation de Quelques Espèces À Haute Valeur Dans Le Sud CamerounUziel CHIMINoch keine Bewertungen
- Comptabilite Par ActicvitesDokument109 SeitenComptabilite Par ActicvitesHajar TissoudaliNoch keine Bewertungen
- Demande de - Remboursement Des - Cotisations - SalarialesDokument1 SeiteDemande de - Remboursement Des - Cotisations - SalarialesRlam Raeshid67% (6)
- Cours 1 Seance 1 Introduction MISDokument32 SeitenCours 1 Seance 1 Introduction MISibrahima yte colyNoch keine Bewertungen
- Cinq Bienfaits Fondamentaux de L'autoformationDokument4 SeitenCinq Bienfaits Fondamentaux de L'autoformationJeremie IFORENoch keine Bewertungen