Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Software Engineering Tools and MethodsDokument19 SeitenSoftware Engineering Tools and MethodsSapfo89Noch keine Bewertungen
- Sat - 15.Pdf - Online Subjective Answer CheckerDokument11 SeitenSat - 15.Pdf - Online Subjective Answer CheckerVj KumarNoch keine Bewertungen
- Artificial IntelligenceDokument7 SeitenArtificial IntelligencePrarthi BhoirNoch keine Bewertungen
- Agile Overview: Iterative Software DevelopmentDokument9 SeitenAgile Overview: Iterative Software DevelopmentAdnan KapadiaNoch keine Bewertungen
- CH14 Market PlanningDokument34 SeitenCH14 Market PlanningChristian John Linalcoso AranteNoch keine Bewertungen
- RPA in Business FunctionsDokument16 SeitenRPA in Business FunctionsPeter HertensteinNoch keine Bewertungen
- Outline: Software Engineering For Software-Intensive Systems: IV RequirementsDokument11 SeitenOutline: Software Engineering For Software-Intensive Systems: IV Requirementsvar6212Noch keine Bewertungen
- Welcome To:: Introduction To Classification & Classification AlgorithmsDokument42 SeitenWelcome To:: Introduction To Classification & Classification AlgorithmsAasmiNoch keine Bewertungen
- Applications of AI in manufacturing, healthcare, and oil and gasDokument2 SeitenApplications of AI in manufacturing, healthcare, and oil and gasJesse MacDonald PhiriNoch keine Bewertungen
- BRD Customer Client Sign Off Mahadev AnDokument7 SeitenBRD Customer Client Sign Off Mahadev AnbtbowmanNoch keine Bewertungen
- 1B8 RCM Maintenance Strategy Selection Exercizes Day1 2nd HaDokument7 Seiten1B8 RCM Maintenance Strategy Selection Exercizes Day1 2nd HaKalpeshkumar PatelNoch keine Bewertungen
- Nonlinear Identification of UAV DynamicsDokument3 SeitenNonlinear Identification of UAV DynamicsbrunocsouzaNoch keine Bewertungen
- Requirements Specification With The IEEE 830 and IEEE 29148 StandardsDokument20 SeitenRequirements Specification With The IEEE 830 and IEEE 29148 StandardsSalah ZaamoutNoch keine Bewertungen
- Linear Classifiers in Python: Chapter1Dokument16 SeitenLinear Classifiers in Python: Chapter1NishantNoch keine Bewertungen
- Phases of SDLC, SDLC Models, Design Project InitiationDokument14 SeitenPhases of SDLC, SDLC Models, Design Project InitiationBukola BukkyNoch keine Bewertungen
- Time Impact Analysis For BeginnersDokument2 SeitenTime Impact Analysis For Beginnerssohail2006Noch keine Bewertungen
- World Quality Report 2019 20Dokument68 SeitenWorld Quality Report 2019 20MichellNoch keine Bewertungen
- Conventional Software Management ProblemsDokument101 SeitenConventional Software Management Problemshina rani100% (2)
- Mis Information Systems PlanningDokument5 SeitenMis Information Systems PlanningKaren RotichNoch keine Bewertungen
- Unit 4 Sample Problems and SolutionsDokument34 SeitenUnit 4 Sample Problems and Solutionssureshnagarajan1971Noch keine Bewertungen
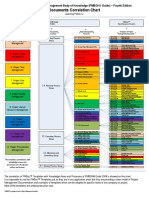
- PM Pmbok 4Th Edition DocumentsDokument1 SeitePM Pmbok 4Th Edition DocumentsXozanNoch keine Bewertungen
- Interview Humberto MaturanaDokument2 SeitenInterview Humberto MaturanaNicolás SálocinNoch keine Bewertungen
- (08 Marks) (08 Marks)Dokument2 Seiten(08 Marks) (08 Marks)SamyNoch keine Bewertungen
- Bilingualism's Effect on Third Language LearningDokument5 SeitenBilingualism's Effect on Third Language LearningALFONSO HERNANDEZ HERNANDEZNoch keine Bewertungen
- ITC Notes 2Dokument36 SeitenITC Notes 2Shanu NizarNoch keine Bewertungen
- Rapid Prototyping: Lessons Learned: ScollDokument11 SeitenRapid Prototyping: Lessons Learned: Scollsannan azizNoch keine Bewertungen
- STudyScheme TownhallDokument12 SeitenSTudyScheme TownhallNicoleNoch keine Bewertungen
- 2023 Top 10 Field Service Software Systems Report Panorama ConsultingDokument26 Seiten2023 Top 10 Field Service Software Systems Report Panorama Consultingnhiphan.31221023658Noch keine Bewertungen
- Questions With Answers - Project Scope ManagementDokument5 SeitenQuestions With Answers - Project Scope ManagementAmit Singh33% (3)
- Ai PPTDokument24 SeitenAi PPTAbhishek KoushikNoch keine Bewertungen