Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Conducting Effective Meetings WorkBookDokument36 SeitenConducting Effective Meetings WorkBookCheri HoNoch keine Bewertungen
- Enron Case StudyDokument23 SeitenEnron Case StudyJayesh Dubey100% (1)
- Antheil - Piano Sonata No 4Dokument29 SeitenAntheil - Piano Sonata No 4TateCarson100% (1)
- SQF Edition 8 Quick Start GuideDokument27 SeitenSQF Edition 8 Quick Start Guidefourat.zarkounaNoch keine Bewertungen
- Listado de Vehiculos para ChatarrizaciónDokument658 SeitenListado de Vehiculos para ChatarrizacióntaycotcNoch keine Bewertungen
- Military-Grade Counter-Drone System: Protect Your Airspace From Drone AttacksDokument8 SeitenMilitary-Grade Counter-Drone System: Protect Your Airspace From Drone Attackscroffle.inNoch keine Bewertungen
- Method Statement Riyadh School Project Fire Fighting SystemDokument3 SeitenMethod Statement Riyadh School Project Fire Fighting Systemkhantoseef84Noch keine Bewertungen
- The Relationship Between International Innovation Collaboration, Intramural R&D and Smes' Innovation Performance: A Quantile Regression ApproachDokument6 SeitenThe Relationship Between International Innovation Collaboration, Intramural R&D and Smes' Innovation Performance: A Quantile Regression ApproachSurya DhNoch keine Bewertungen
- Hyperbolic FunctionsDokument11 SeitenHyperbolic FunctionsShiraz NajatNoch keine Bewertungen
- Research Paper On Employee BenefitsDokument7 SeitenResearch Paper On Employee Benefitskrqovxbnd100% (1)
- Adp w2 2019 TemplateDokument1 SeiteAdp w2 2019 Templatetokahontas85Noch keine Bewertungen
- The Rise of Robot Friendship: Ethical Dilemmas in Science and TechnologyDokument10 SeitenThe Rise of Robot Friendship: Ethical Dilemmas in Science and TechnologyStephen VillegasNoch keine Bewertungen
- Measure Surface Texture and Lead Angle of ShaftsDokument7 SeitenMeasure Surface Texture and Lead Angle of Shaftsshivam daveNoch keine Bewertungen
- Synapse: I. Anatomical TypesDokument5 SeitenSynapse: I. Anatomical TypesAswin AjayNoch keine Bewertungen
- Combat Patrol - GREY KNIGHTSDokument6 SeitenCombat Patrol - GREY KNIGHTSJan PolisiakNoch keine Bewertungen
- VPSC7c ManualDokument114 SeitenVPSC7c ManualChandra ClarkNoch keine Bewertungen
- Ethnography Discussion QuestionsDokument2 SeitenEthnography Discussion Questionsapi-235718856100% (1)
- Two Square TEAM 82 - LondonCRUDokument53 SeitenTwo Square TEAM 82 - LondonCRUAsankanathNoch keine Bewertungen
- Night Journey Approval Form Rev 0Dokument2 SeitenNight Journey Approval Form Rev 0Tagubilin DailyNoch keine Bewertungen
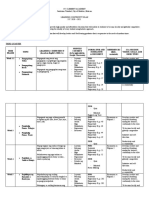
- FILIPINO 2 LEARNING PLAN 3rd QuarterDokument4 SeitenFILIPINO 2 LEARNING PLAN 3rd QuarterMary Kryss DG SangleNoch keine Bewertungen
- Methods of Determining Thermal Efficiency in Spray Drying ProcessDokument3 SeitenMethods of Determining Thermal Efficiency in Spray Drying ProcessDfunz WilphenNoch keine Bewertungen
- 100kva DG Set - 100kva Koel GensetDokument3 Seiten100kva DG Set - 100kva Koel GensetMothilalNoch keine Bewertungen
- R.K. Anand Contempt Delhi HC JudgementDokument112 SeitenR.K. Anand Contempt Delhi HC JudgementSampath BulusuNoch keine Bewertungen
- Product PolyolDokument1 SeiteProduct PolyolAgung SiswahyuNoch keine Bewertungen
- God Only Knows Chords UkuleleDokument3 SeitenGod Only Knows Chords UkuleleMark0% (1)
- In The Star Schema DesignDokument11 SeitenIn The Star Schema DesignppavandsNoch keine Bewertungen
- Xtraction User GuideDokument63 SeitenXtraction User Guidegunalprasadg100% (1)
- VMGODokument3 SeitenVMGOklirt carayoNoch keine Bewertungen
- Neurohealth Properties of Hericium Erinaceus MycelDokument11 SeitenNeurohealth Properties of Hericium Erinaceus Myceldokan42Noch keine Bewertungen
- Tracing Changes Through A Thousand YearsDokument27 SeitenTracing Changes Through A Thousand YearsPranit PrasoonNoch keine Bewertungen