Das könnte Ihnen auch gefallen
- Circuitos Basicos de ElectroneumaticaDokument165 SeitenCircuitos Basicos de ElectroneumaticaOscar Alfredo Chavez Islas95% (19)
- Mecanica AutomotrizDokument178 SeitenMecanica AutomotrizHeber Arcana100% (7)
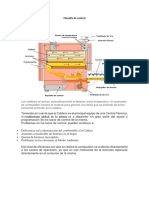
- Control Caldera BiomasaDokument6 SeitenControl Caldera BiomasaMadaoLEMNoch keine Bewertungen
- Automation Studio - GrafcetDokument55 SeitenAutomation Studio - Grafcetjmoc1887100% (5)
- Válvulas, Selección, Uso y Mantenimiento by VartDokument285 SeitenVálvulas, Selección, Uso y Mantenimiento by Vartpedroluischoque96% (24)
- Trabajo de Control Nosotros Control1 PDFDokument15 SeitenTrabajo de Control Nosotros Control1 PDFJuan RomeroNoch keine Bewertungen
- Tipos de Mantenimiento IndustrialDokument2 SeitenTipos de Mantenimiento IndustrialLibreria Orellana100% (1)
- L1 Automatizacion 20231Dokument15 SeitenL1 Automatizacion 20231Lizardo Reyes JaraNoch keine Bewertungen
- Plan COVID Minera San RafaelDokument130 SeitenPlan COVID Minera San RafaelJoe Eden QNoch keine Bewertungen
- Practicas Tercer ParcialDokument28 SeitenPracticas Tercer ParcialYair FerreyraNoch keine Bewertungen
- Practica No 1Dokument6 SeitenPractica No 1Abraham Chacón Quisisani100% (1)
- Aprenda - Transistores - en - 15 - D - As - Christian - Gellert - PDF Filename UTF-8''Aprenda Transistores en 15 Días - Christian Gellert PDFDokument136 SeitenAprenda - Transistores - en - 15 - D - As - Christian - Gellert - PDF Filename UTF-8''Aprenda Transistores en 15 Días - Christian Gellert PDFAR Rms100% (2)
- Articulo IEEEDokument6 SeitenArticulo IEEEenzo_kcrs2787109Noch keine Bewertungen
- Fundamentals of industrial communications in automationVon EverandFundamentals of industrial communications in automationNoch keine Bewertungen
- Lab4 - Parametrizacion Avanzada Variador Schneider ATV12 PDFDokument19 SeitenLab4 - Parametrizacion Avanzada Variador Schneider ATV12 PDFPICHILINGUE ESENARRO RUBEN MARTINNoch keine Bewertungen
- LABORATORIO N°3 PARTE 2 - Grupo 5Dokument9 SeitenLABORATORIO N°3 PARTE 2 - Grupo 5MARTIN ZAPANANoch keine Bewertungen
- Lab - Servovalvulas AnexosDokument15 SeitenLab - Servovalvulas AnexosProbando EliminarNoch keine Bewertungen
- Medicion de Nivel Instrumentacion Industrial CAP 3 (1) .Dokument25 SeitenMedicion de Nivel Instrumentacion Industrial CAP 3 (1) .carmaquiNoch keine Bewertungen
- HYD-2300 Spn-4Dokument17 SeitenHYD-2300 Spn-4MANUEL CASTILLONoch keine Bewertungen
- Manual Variador Frecuencia PowerFlex40Dokument13 SeitenManual Variador Frecuencia PowerFlex40julio javier gonzales gonzalesNoch keine Bewertungen
- Programacion en SysconDokument11 SeitenProgramacion en Sysconjoselo12877Noch keine Bewertungen
- Nomenclatura de Valvulas PDFDokument6 SeitenNomenclatura de Valvulas PDFMauricio RamirezNoch keine Bewertungen
- HYD-2300 Spn-3Dokument22 SeitenHYD-2300 Spn-3MANUEL CASTILLONoch keine Bewertungen
- Manual Geeetech Prusa I3 proDokument49 SeitenManual Geeetech Prusa I3 proEugge Ferreyra100% (1)
- AVID Eazycal EsDokument9 SeitenAVID Eazycal EsFlavioNoch keine Bewertungen
- Practica de GrafcetDokument12 SeitenPractica de GrafcetGallardo KevinNoch keine Bewertungen
- Ejemplos Sistemas ControlDokument41 SeitenEjemplos Sistemas ControlÁngel CruzNoch keine Bewertungen
- Oxifuel Coal Cycle 1Dokument3 SeitenOxifuel Coal Cycle 1omarbaldemarNoch keine Bewertungen
- Curso Parte 4Dokument24 SeitenCurso Parte 4franco_3210_Noch keine Bewertungen
- Característica de La VálvulaDokument42 SeitenCaracterística de La VálvulaTONYNoch keine Bewertungen
- Curso de Programación PLC 2020 - v2Dokument45 SeitenCurso de Programación PLC 2020 - v2AugustoNoch keine Bewertungen
- Contador eléctrico y su funcionamiento en circuito de control electrohidráulicoDokument17 SeitenContador eléctrico y su funcionamiento en circuito de control electrohidráulicoMANUEL CASTILLO100% (1)
- Elementos de entrada y tratamiento de señales en electroneumáticaDokument37 SeitenElementos de entrada y tratamiento de señales en electroneumáticaDavid ReyesNoch keine Bewertungen
- Enlace Entre Dos PLCDokument20 SeitenEnlace Entre Dos PLCAldo GtzNoch keine Bewertungen
- Evaluación Diagnóstica de InstrumentaciónDokument8 SeitenEvaluación Diagnóstica de InstrumentaciónCesar Eduardo Mendez Bórrea100% (1)
- Catalogo Sica IndustrialDokument24 SeitenCatalogo Sica IndustrialmiguelarcienegaNoch keine Bewertungen
- Equipos y Componentes de Una Subestacion EléctricaDokument7 SeitenEquipos y Componentes de Una Subestacion EléctricaJuan Mendes BlackNoch keine Bewertungen
- Lazos de Control de ProcesosDokument4 SeitenLazos de Control de Procesosluis pretellNoch keine Bewertungen
- Mfa301 U1 Ef Trabajo DirigidoDokument9 SeitenMfa301 U1 Ef Trabajo DirigidocristobalNoch keine Bewertungen
- Valvulas de ControlDokument12 SeitenValvulas de ControlLuis Gerardo LucioNoch keine Bewertungen
- Clase 1 - Instrumentacion Avanzada PDFDokument38 SeitenClase 1 - Instrumentacion Avanzada PDFjose_rubio_gonzalezNoch keine Bewertungen
- Alecop 10 Regulación MotoresDokument13 SeitenAlecop 10 Regulación MotoresJavi Barrera TejeraNoch keine Bewertungen
- Ajustes de Cero y Span Flujo ManualDokument3 SeitenAjustes de Cero y Span Flujo ManualBrigitte100% (1)
- Practica 1. Introduccion A Software de SimulacionDokument4 SeitenPractica 1. Introduccion A Software de SimulacionRafael SierraNoch keine Bewertungen
- 2 Creus Resumen TransmisoresDokument6 Seiten2 Creus Resumen TransmisoresjhandryNoch keine Bewertungen
- Instrument Ac I OnDokument341 SeitenInstrument Ac I OnfelixanibalNoch keine Bewertungen
- Válvulas - Actuadores - Posicionadores - NilDokument10 SeitenVálvulas - Actuadores - Posicionadores - NilPriscila CruzNoch keine Bewertungen
- 3730 3Dokument138 Seiten3730 3Andres CarrascoNoch keine Bewertungen
- Simulador NIBP MS200 prueba multiusos presión arterialDokument2 SeitenSimulador NIBP MS200 prueba multiusos presión arterialAbraham Elias Sarquis LunaNoch keine Bewertungen
- Unidad 1 Contenidos Semana 1Dokument18 SeitenUnidad 1 Contenidos Semana 1DannaeNoch keine Bewertungen
- Automatizacion y Control de Procesos Con PLCDokument42 SeitenAutomatizacion y Control de Procesos Con PLCElectricidad Practica InicialNoch keine Bewertungen
- Control nivel líquido depósitoDokument7 SeitenControl nivel líquido depósitoVictor ArapaNoch keine Bewertungen
- SFC-Lenguaje gráfico para PLCsDokument22 SeitenSFC-Lenguaje gráfico para PLCsRicardo FuentesNoch keine Bewertungen
- 2020-Valvulas CATALOGO MICRODokument72 Seiten2020-Valvulas CATALOGO MICROAlexander DonatoNoch keine Bewertungen
- Taller 5 NivelDokument5 SeitenTaller 5 NivelAlberto Chica CardenasNoch keine Bewertungen
- Descripción de Los FlancosDokument3 SeitenDescripción de Los FlancosAnonymous Tr7Gt0Noch keine Bewertungen
- Presentacion SubestacionesDokument13 SeitenPresentacion SubestacionesJulio Cesar Vargas BedonNoch keine Bewertungen
- 2210B SPA - Teoria - Vers 2014Dokument32 Seiten2210B SPA - Teoria - Vers 2014Johan MorenoNoch keine Bewertungen
- Prensacables Laton Ex'd DelgaDokument6 SeitenPrensacables Laton Ex'd DelgaAdolfo EyzaguirreNoch keine Bewertungen
- Práctica 6Dokument6 SeitenPráctica 6RayalNoch keine Bewertungen
- Manual de Usuario Nova 6.0Dokument42 SeitenManual de Usuario Nova 6.0maifer rodriguezNoch keine Bewertungen
- CI ReguladorVoltajeDokument20 SeitenCI ReguladorVoltajeantony bustamanteNoch keine Bewertungen
- Control On-OfDokument11 SeitenControl On-OfClau Ri CaNoch keine Bewertungen
- Subestacion MovilDokument20 SeitenSubestacion MovilchristopherpatrickNoch keine Bewertungen
- Sistemas Integrados de ManufacturaDokument7 SeitenSistemas Integrados de ManufacturaGuillermo GarciaNoch keine Bewertungen
- Automatización de sistemas industriales con PLCDokument51 SeitenAutomatización de sistemas industriales con PLCeverith ariasNoch keine Bewertungen
- Contro Lpor PLCG PDFDokument74 SeitenContro Lpor PLCG PDFrosemberg_trujilloNoch keine Bewertungen
- Selección de PLC5Dokument60 SeitenSelección de PLC5jorgeb86Noch keine Bewertungen
- OTDRDokument20 SeitenOTDRCarlangas RomeroNoch keine Bewertungen
- Indicadores de Nivel MagtechDokument12 SeitenIndicadores de Nivel Magtechneurolepsia3790Noch keine Bewertungen
- HI 800 427 S HIMatrix Safety Manual SpanishDokument72 SeitenHI 800 427 S HIMatrix Safety Manual SpanishingluferNoch keine Bewertungen
- Codigos de Colores de La Cubierta Externa de Conformidad Con El Tia-598Dokument28 SeitenCodigos de Colores de La Cubierta Externa de Conformidad Con El Tia-598ingluferNoch keine Bewertungen
- Aplicacion Fibra OpticaDokument21 SeitenAplicacion Fibra OpticaingluferNoch keine Bewertungen
- Codigos de Colores de La Cubierta Externa de Conformidad Con El Tia-598Dokument28 SeitenCodigos de Colores de La Cubierta Externa de Conformidad Con El Tia-598ingluferNoch keine Bewertungen
- Automatismos: mecanismos y aplicacionesDokument14 SeitenAutomatismos: mecanismos y aplicacionesangarrui99Noch keine Bewertungen
- Rc-Go-184 Informe EstratégicoDokument1 SeiteRc-Go-184 Informe EstratégicoingluferNoch keine Bewertungen
- CONPES 3510 - Marzo Del 2008Dokument44 SeitenCONPES 3510 - Marzo Del 2008ingluferNoch keine Bewertungen
- Diccionario para ingenieros multilingüeDokument166 SeitenDiccionario para ingenieros multilingüeingluferNoch keine Bewertungen
- Unidad Esme Did ADokument7 SeitenUnidad Esme Did AingluferNoch keine Bewertungen
- Guía rápida de AutoCAD para diseño mecánicoDokument43 SeitenGuía rápida de AutoCAD para diseño mecánicoingluferNoch keine Bewertungen
- Prueba 1 Sin Corregir Costos y PresuouestoDokument11 SeitenPrueba 1 Sin Corregir Costos y PresuouestoGIOVANNA1973Noch keine Bewertungen
- INTOSAI - P - 12 El Valor y Beneficio de Las EFS Marcando La Diferencia en La Vida de Los CiudadanosDokument18 SeitenINTOSAI - P - 12 El Valor y Beneficio de Las EFS Marcando La Diferencia en La Vida de Los CiudadanosYessica MoranNoch keine Bewertungen
- Informe Potencia PDFDokument7 SeitenInforme Potencia PDFFranklin PullupaxiNoch keine Bewertungen
- Ensayo-Proximo Escenario GlobalDokument12 SeitenEnsayo-Proximo Escenario GlobalKinto GuarinNoch keine Bewertungen
- Taller 1 Dibujo TecnicoDokument5 SeitenTaller 1 Dibujo TecnicoYENIFER ROMERONoch keine Bewertungen
- Estructuras de Control, Segunda ClaseDokument17 SeitenEstructuras de Control, Segunda ClaseAlejandro Esteban Flores MellaNoch keine Bewertungen
- PunterosDokument55 SeitenPunterosKa VargasNoch keine Bewertungen
- Actos de Investigación, Prueba y UIF PDF Gratis - Frank AlmanzaDokument36 SeitenActos de Investigación, Prueba y UIF PDF Gratis - Frank AlmanzaRaul Montesinos Carrasco100% (1)
- Evaluacion Coso Pollos RancherosDokument9 SeitenEvaluacion Coso Pollos RancherosYoselin MosquedaNoch keine Bewertungen
- Reglamento de Ley Aportes Al Espacio PblicoDokument60 SeitenReglamento de Ley Aportes Al Espacio Pblicojorge aguirreNoch keine Bewertungen
- Formulario Conocimiento Persona Jurídico. EditableDokument2 SeitenFormulario Conocimiento Persona Jurídico. EditableYonathan AstacioNoch keine Bewertungen
- Tarea 5 y 6, de PasantiaDokument8 SeitenTarea 5 y 6, de PasantiaMichael MartinezNoch keine Bewertungen
- Planilla autoliquidación aportes independientes febrero 2019Dokument1 SeitePlanilla autoliquidación aportes independientes febrero 2019Edwin Guerrero0% (1)
- CC-HSE-F-04 Evaluación de Responsabilidades HES Nivel MedioDokument1 SeiteCC-HSE-F-04 Evaluación de Responsabilidades HES Nivel MedioRobles RoblesNoch keine Bewertungen
- Supertubo Pead o Hdpe v06Dokument8 SeitenSupertubo Pead o Hdpe v06Giovanka CaroNoch keine Bewertungen
- Persiana fsd-35Dokument2 SeitenPersiana fsd-35joroma58Noch keine Bewertungen
- Actividad 1 - 19012024.docx - Documentos de GoogleDokument14 SeitenActividad 1 - 19012024.docx - Documentos de Googlebuchin77Noch keine Bewertungen
- 43 Ra 0081 2021 02Dokument2 Seiten43 Ra 0081 2021 02Jhonatan PacificoNoch keine Bewertungen
- Simulación de sistemas de mantenimiento industrialDokument21 SeitenSimulación de sistemas de mantenimiento industrialpablo marcelo silvaNoch keine Bewertungen
- Regresión Lineal Aplicada en FabricaciónDokument17 SeitenRegresión Lineal Aplicada en FabricaciónAbdiel Abi CaamalNoch keine Bewertungen
- Parcial 1 ProduccionDokument8 SeitenParcial 1 ProduccionJuan Diego Perez MedinaNoch keine Bewertungen
- Procedimiento de Calculo Aire Acondicionado VentDepotDokument3 SeitenProcedimiento de Calculo Aire Acondicionado VentDepotArqadeDimensionNoch keine Bewertungen
- HISTORIA 5 Continuidad #5 CLASE PRIMER PERONISMODokument5 SeitenHISTORIA 5 Continuidad #5 CLASE PRIMER PERONISMOMelanie LotoNoch keine Bewertungen
- TEMPO Fireworks Propuesta 30 Abr, 2022 QRDokument5 SeitenTEMPO Fireworks Propuesta 30 Abr, 2022 QRMiguel TorresNoch keine Bewertungen
- FT Energía Solar PDFDokument16 SeitenFT Energía Solar PDFjocacayeNoch keine Bewertungen
- Qué Es Un PeriódicoDokument2 SeitenQué Es Un PeriódicoCarolina Reyes AlemanNoch keine Bewertungen
- 04 - Institucionalidad Del Saneamiento RuralDokument93 Seiten04 - Institucionalidad Del Saneamiento RuralBrian Polo BriceñoNoch keine Bewertungen
- Mall Plaza Food Tienda Menor 2019Dokument71 SeitenMall Plaza Food Tienda Menor 2019carlosNoch keine Bewertungen