Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- APA Vs Harvard Referencing - PDFDokument4 SeitenAPA Vs Harvard Referencing - PDFTalo Contajazz Chileshe50% (2)
- IT Level 4 COCDokument2 SeitenIT Level 4 COCfikru tesefaye0% (1)
- 3400 MD IomDokument52 Seiten3400 MD IomIhabNoch keine Bewertungen
- 7Dokument6 Seiten7Joenetha Ann Aparici100% (1)
- 40 Sink and FloatDokument38 Seiten40 Sink and Floatleandro hualverdeNoch keine Bewertungen
- PlateNo 1Dokument7 SeitenPlateNo 1Franz Anfernee Felipe GenerosoNoch keine Bewertungen
- Noise and DB Calculations: Smart EDGE ECE Review SpecialistDokument2 SeitenNoise and DB Calculations: Smart EDGE ECE Review SpecialistLM BecinaNoch keine Bewertungen
- Fuzzy Gain Scheduled Pi Controller For ADokument5 SeitenFuzzy Gain Scheduled Pi Controller For AOumayNoch keine Bewertungen
- Carnegie Mellon Thesis RepositoryDokument4 SeitenCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- PD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsDokument20 SeitenPD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsHazel Jael HernandezNoch keine Bewertungen
- 25 Middlegame Concepts Every Chess Player Must KnowDokument2 Seiten25 Middlegame Concepts Every Chess Player Must KnowKasparicoNoch keine Bewertungen
- A Content Analysis of SeabankDokument13 SeitenA Content Analysis of SeabankMarielet Dela PazNoch keine Bewertungen
- Soft Skills & Personality DevelopmentDokument62 SeitenSoft Skills & Personality DevelopmentSajid PashaNoch keine Bewertungen
- 4th Sept - Marathon Series Lecture 8 - General AwarenessDokument208 Seiten4th Sept - Marathon Series Lecture 8 - General AwarenessManbir ArinNoch keine Bewertungen
- Practice - Test 2Dokument5 SeitenPractice - Test 2Nguyễn QanhNoch keine Bewertungen
- Lab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroDokument3 SeitenLab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroGladys Ruth PaypaNoch keine Bewertungen
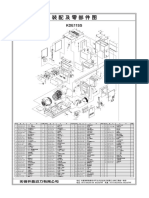
- KDE11SSDokument2 SeitenKDE11SSluisgomezpasion1Noch keine Bewertungen
- Jacob Stewart ResumeDokument2 SeitenJacob Stewart Resumeapi-250063152Noch keine Bewertungen
- Kissoft 15,69,0.4Dokument10 SeitenKissoft 15,69,0.4Daggupati PraveenNoch keine Bewertungen
- ..Product CatalogueDokument56 Seiten..Product Catalogue950 911Noch keine Bewertungen
- D25KS Sanvick PDFDokument4 SeitenD25KS Sanvick PDFJiménez Manuel100% (1)
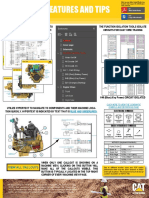
- View All Callouts: Function Isolation ToolsDokument29 SeitenView All Callouts: Function Isolation Toolsمهدي شقرونNoch keine Bewertungen
- CATaclysm Preview ReleaseDokument52 SeitenCATaclysm Preview ReleaseGhaderalNoch keine Bewertungen
- CA21159 MG 8 Digital BookletDokument5 SeitenCA21159 MG 8 Digital BookletcantaloupemusicNoch keine Bewertungen
- WWW Studocu Com in N 29646569 Sid 01682568219Dokument1 SeiteWWW Studocu Com in N 29646569 Sid 01682568219Nivetha SelvamuruganNoch keine Bewertungen
- GPP Calendar of Activities 2022 23 SdoDokument5 SeitenGPP Calendar of Activities 2022 23 SdoRomel GarciaNoch keine Bewertungen
- Dialectical Relationship Between Translation Theory and PracticeDokument5 SeitenDialectical Relationship Between Translation Theory and PracticeEverything Under the sunNoch keine Bewertungen
- Registration ListDokument5 SeitenRegistration ListGnanesh Shetty BharathipuraNoch keine Bewertungen
- Detail Design Drawings: OCTOBER., 2017 Date Span Carriage WayDokument26 SeitenDetail Design Drawings: OCTOBER., 2017 Date Span Carriage WayManvendra NigamNoch keine Bewertungen
- Victor 2Dokument30 SeitenVictor 2EmmanuelNoch keine Bewertungen