Das könnte Ihnen auch gefallen
- Cheat Sheet PDFDokument45 SeitenCheat Sheet PDFManoj Reddy100% (1)
- Galvanic Skin Response The Complete Pocket GuideDokument36 SeitenGalvanic Skin Response The Complete Pocket GuideHasan ArslanNoch keine Bewertungen
- Amygdala HijackDokument15 SeitenAmygdala HijackDeni KusmiantoNoch keine Bewertungen
- Reconstruction of Virtual Neural Circuits in An Insect BrainDokument8 SeitenReconstruction of Virtual Neural Circuits in An Insect BrainnithiananthiNoch keine Bewertungen
- Operant Conditioning Edward ThorndikeDokument5 SeitenOperant Conditioning Edward ThorndikeSajid AhmadNoch keine Bewertungen
- Mapping the Brain's Contribution to NeurotechnologyDokument7 SeitenMapping the Brain's Contribution to NeurotechnologySaarvariNoch keine Bewertungen
- Signal Processing in Auditory Neuroscience: Temporal and Spatial Features of Sound and SpeechVon EverandSignal Processing in Auditory Neuroscience: Temporal and Spatial Features of Sound and SpeechNoch keine Bewertungen
- Math For Machine Learning Book PreviewDokument43 SeitenMath For Machine Learning Book PreviewJoseph Affonso Xaxo0% (1)
- Visual System For Medical StudentsDokument238 SeitenVisual System For Medical Studentskhorrami4Noch keine Bewertungen
- EEG ArtifactsDokument18 SeitenEEG ArtifactsNazwan Hassa100% (1)
- Eeg, PSG, Sleep DisordersDokument48 SeitenEeg, PSG, Sleep DisordersIoana MunteanuNoch keine Bewertungen
- Symptom Check List and Functional Specialization in The BrainDokument65 SeitenSymptom Check List and Functional Specialization in The BrainSamuel Ballou100% (2)
- Brain CellsDokument4 SeitenBrain CellsJulius RicardeNoch keine Bewertungen
- Neurophotonics and Biomedical SpectroscopyVon EverandNeurophotonics and Biomedical SpectroscopyRobert R. AlfanoNoch keine Bewertungen
- The Human Brain Project: A Report To The European CommissionDokument108 SeitenThe Human Brain Project: A Report To The European CommissionJc Querol100% (1)
- Quantitative EEG, Event-Related Potentials and NeurotherapyVon EverandQuantitative EEG, Event-Related Potentials and NeurotherapyBewertung: 5 von 5 Sternen5/5 (1)
- Northeast Center For Special Care: Information BulletinDokument7 SeitenNortheast Center For Special Care: Information Bulletinswapnika12345100% (1)
- Trends in Neurosciences 2013 PDFDokument67 SeitenTrends in Neurosciences 2013 PDFClara BerenguerNoch keine Bewertungen
- Intervention: Electrical Scalp Neurons BrainDokument25 SeitenIntervention: Electrical Scalp Neurons BrainnikitatayaNoch keine Bewertungen
- Deep Learning Essentials 1Dokument4 SeitenDeep Learning Essentials 1get_togetherNoch keine Bewertungen
- Cognitive Informatics, Computer Modelling, and Cognitive Science: Volume 1: Theory, Case Studies, and ApplicationsVon EverandCognitive Informatics, Computer Modelling, and Cognitive Science: Volume 1: Theory, Case Studies, and ApplicationsG. R. SinhaNoch keine Bewertungen
- Neurobiology of Ischemic Brain DamageVon EverandNeurobiology of Ischemic Brain DamageK. KogureNoch keine Bewertungen
- Introduction To Machine LearningDokument6 SeitenIntroduction To Machine LearningCeleunoia CelestineNoch keine Bewertungen
- Introduction to EEG- and Speech-Based Emotion RecognitionVon EverandIntroduction to EEG- and Speech-Based Emotion RecognitionNoch keine Bewertungen
- EEG-Based Brain-Computer Interfaces: Cognitive Analysis and Control ApplicationsVon EverandEEG-Based Brain-Computer Interfaces: Cognitive Analysis and Control ApplicationsBewertung: 5 von 5 Sternen5/5 (1)
- Smart Wearable EEG SensorDokument6 SeitenSmart Wearable EEG SensorLuiz EduardoNoch keine Bewertungen
- Phononics: Interface Transmission Tutorial Book SeriesVon EverandPhononics: Interface Transmission Tutorial Book SeriesNoch keine Bewertungen
- Chengqing Zong - Rui Xia - Jiajun Zhang - Text Data Mining-Springer SingaporeDokument506 SeitenChengqing Zong - Rui Xia - Jiajun Zhang - Text Data Mining-Springer Singaporeياسر سعد الخزرجيNoch keine Bewertungen
- EEG Anubhav 071221Dokument58 SeitenEEG Anubhav 071221Harsh TanwarNoch keine Bewertungen
- (Natoc 1Dokument495 Seiten(Natoc 1Entre100% (1)
- Tactile Sensing, Skill Learning, and Robotic Dexterous ManipulationVon EverandTactile Sensing, Skill Learning, and Robotic Dexterous ManipulationNoch keine Bewertungen
- ODE/PDE α-synuclein Models for Parkinson’s DiseaseVon EverandODE/PDE α-synuclein Models for Parkinson’s DiseaseNoch keine Bewertungen
- Principles of Neuromorphic Photonics PDFDokument28 SeitenPrinciples of Neuromorphic Photonics PDFSatadru DasNoch keine Bewertungen
- ElectrooculographyDokument66 SeitenElectrooculographyDhinesh_90100% (2)
- Basic NeuroScience Course DetailsDokument3 SeitenBasic NeuroScience Course DetailssharadiitianNoch keine Bewertungen
- Fundamentals of Light Microscopy II Fluorescence Deconvolution Confocal Multiphoton Spectral MicrosDokument37 SeitenFundamentals of Light Microscopy II Fluorescence Deconvolution Confocal Multiphoton Spectral MicrosVivek AnandanNoch keine Bewertungen
- TDCS InformationDokument19 SeitenTDCS InformationPeter Benedikt WeberNoch keine Bewertungen
- The Visually Responsive Neuron: From Basic Neurophysiology to BehaviorVon EverandThe Visually Responsive Neuron: From Basic Neurophysiology to BehaviorT.P. HicksNoch keine Bewertungen
- Self Cingulo PosteriorDokument7 SeitenSelf Cingulo PosteriorJose ZapataNoch keine Bewertungen
- Magnetic Resonance in Biological Systems: Proceedings of the Second International Conference Held at the Wenner-Gren Center, Stockholm, June 1966Von EverandMagnetic Resonance in Biological Systems: Proceedings of the Second International Conference Held at the Wenner-Gren Center, Stockholm, June 1966A. EhrenbergNoch keine Bewertungen
- EEGDokument16 SeitenEEGadibaronessNoch keine Bewertungen
- GazePointer JournalDokument12 SeitenGazePointer JournalHaison AliNoch keine Bewertungen
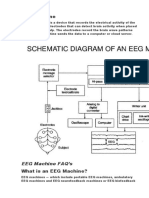
- EEG MachineDokument3 SeitenEEG MachineOlea ScorpanNoch keine Bewertungen
- Mueller Matrix Measurement Techniques For Various Optical Elements & Biological TissuesDokument33 SeitenMueller Matrix Measurement Techniques For Various Optical Elements & Biological TissuesHarsh PurwarNoch keine Bewertungen
- ALF Functional ApplianceDokument4 SeitenALF Functional ApplianceValonia IreneNoch keine Bewertungen
- Chapter 42 - Dizziness: Key Facts and CheckpointsDokument12 SeitenChapter 42 - Dizziness: Key Facts and Checkpointsprofarmah6150Noch keine Bewertungen
- Cellular Imaging Techniques for Neuroscience and BeyondVon EverandCellular Imaging Techniques for Neuroscience and BeyondNoch keine Bewertungen
- Working MemoryDokument8 SeitenWorking MemoryAvengingBrainNoch keine Bewertungen
- Eyeball Motion Controlled Wheelchair Using IR SensorsDokument4 SeitenEyeball Motion Controlled Wheelchair Using IR SensorssathishNoch keine Bewertungen
- Mercury in Dental-Filling Materials - An Updated Risk Analysis in Environmental Medical Terms Maths BerlinDokument33 SeitenMercury in Dental-Filling Materials - An Updated Risk Analysis in Environmental Medical Terms Maths BerlinNacho Guindo VílchezNoch keine Bewertungen
- Cerebellum PDFDokument31 SeitenCerebellum PDFJonathan PaghubasanNoch keine Bewertungen
- #Non-Invasive Brain-To-Brain Interface (BBI) - Establishing Functional Links Between Two BrainsDokument8 Seiten#Non-Invasive Brain-To-Brain Interface (BBI) - Establishing Functional Links Between Two BrainsShang-JuiTsaiNoch keine Bewertungen
- Neurohormonal Regulation of Body FunctionsDokument34 SeitenNeurohormonal Regulation of Body FunctionsjimmyNoch keine Bewertungen
- Eeg EogDokument19 SeitenEeg EogpranoyrajNoch keine Bewertungen
- Laser Doppler VelocimetryDokument20 SeitenLaser Doppler Velocimetryimsandy09Noch keine Bewertungen
- Nerve Membranes: A Study of the Biological and Chemical Aspects of Neuron–Glia RelationshipsVon EverandNerve Membranes: A Study of the Biological and Chemical Aspects of Neuron–Glia RelationshipsNoch keine Bewertungen
- A Wearable UHF RFID-Based EEG System: Artem Dementyev Joshua R. SmithDokument7 SeitenA Wearable UHF RFID-Based EEG System: Artem Dementyev Joshua R. SmithPranesh Ram DevarajNoch keine Bewertungen
- Real-Time Neuromorphic System For Large-ScaleDokument14 SeitenReal-Time Neuromorphic System For Large-ScaleDario AcostaNoch keine Bewertungen
- Psychophysiology: Today and TomorrowVon EverandPsychophysiology: Today and TomorrowN. P. BechterevaBewertung: 2 von 5 Sternen2/5 (1)
- Tcs Docs VerificationDokument1 SeiteTcs Docs VerificationSaurabh MishraNoch keine Bewertungen
- Updated Transfer FormDokument2 SeitenUpdated Transfer FormSaurabh MishraNoch keine Bewertungen
- Rent ReceiptDokument1 SeiteRent ReceiptSaurabh MishraNoch keine Bewertungen
- Datasheetuc 16 F 876 A 3Dokument10 SeitenDatasheetuc 16 F 876 A 3Saurabh MishraNoch keine Bewertungen
- Controlling Wheelchair Using ElectroencephalogramDokument7 SeitenControlling Wheelchair Using ElectroencephalogramSaurabh MishraNoch keine Bewertungen
- Presentation 1Dokument1 SeitePresentation 1Saurabh MishraNoch keine Bewertungen
- Rej05b0804 M16capDokument46 SeitenRej05b0804 M16capalfinjames1679Noch keine Bewertungen
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- PEPSI++: Fast and Lightweight Network For Image InpaintingDokument14 SeitenPEPSI++: Fast and Lightweight Network For Image InpaintingHimanshu PanwarNoch keine Bewertungen
- Asru 2013 PDFDokument6 SeitenAsru 2013 PDFYeni panjaitanNoch keine Bewertungen
- Business Intelligence - Chapter 1Dokument36 SeitenBusiness Intelligence - Chapter 1OSAMA MASHALNoch keine Bewertungen
- Fichas de Aprendizaje IBM AI - Quizletv2Dokument26 SeitenFichas de Aprendizaje IBM AI - Quizletv2juanreyesNoch keine Bewertungen
- Predictive Data Mining and Discovering Hidden Values of Data WarehouseDokument5 SeitenPredictive Data Mining and Discovering Hidden Values of Data WarehouseLangit Merah Di SelatanNoch keine Bewertungen
- Comparison of Gradient Descent Algorithms On Training Neural NetworksDokument20 SeitenComparison of Gradient Descent Algorithms On Training Neural NetworksLoc LuongNoch keine Bewertungen
- Deep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueDokument6 SeitenDeep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueYing SiNoch keine Bewertungen
- The Shape of Learning Curves: A Review: Tom Viering Marco LoogDokument46 SeitenThe Shape of Learning Curves: A Review: Tom Viering Marco LoogWilder Gonzalez DiazNoch keine Bewertungen
- Dippa Weight Vauhkonen 27092012Dokument83 SeitenDippa Weight Vauhkonen 27092012hanstiwariNoch keine Bewertungen
- TutorialDokument6 SeitenTutorialspwajeehNoch keine Bewertungen
- 5707 11 RNN LSTMDokument128 Seiten5707 11 RNN LSTMMayank KumarNoch keine Bewertungen
- Neural NetworkDokument131 SeitenNeural NetworkDEVANSHU SINGLANoch keine Bewertungen
- Applications of Artificial Neural Network Based Battery ManagementDokument18 SeitenApplications of Artificial Neural Network Based Battery ManagementAliaa TarekNoch keine Bewertungen
- Professional Knowledge Questions Asked in Previous IBPS IT Officer Exam-Www - Ibpsguide.com (3) - 1Dokument4 SeitenProfessional Knowledge Questions Asked in Previous IBPS IT Officer Exam-Www - Ibpsguide.com (3) - 1anuciaaNoch keine Bewertungen
- Creating Optical Character Recognition (OCR) Applications Using Neural Networks - CodeProjectDokument7 SeitenCreating Optical Character Recognition (OCR) Applications Using Neural Networks - CodeProjectSargunam SankaravadivelNoch keine Bewertungen
- CS7641 Machine Learning Midterm Notes PDFDokument239 SeitenCS7641 Machine Learning Midterm Notes PDFHong YuNoch keine Bewertungen
- Deep Learning Techniques Overview: Architectures, Methods & AppsDokument11 SeitenDeep Learning Techniques Overview: Architectures, Methods & AppsAnonymous 9qlmzmlqxwNoch keine Bewertungen
- Production Forecasting of Petroleum Reservoir Applying Higher-Order Neural Networks (HONN) With Limited Reservoir DataDokument13 SeitenProduction Forecasting of Petroleum Reservoir Applying Higher-Order Neural Networks (HONN) With Limited Reservoir DataAnre Thanh HungNoch keine Bewertungen
- Implementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsDokument6 SeitenImplementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsInternational Journal of Innovative Science and Research Technology100% (1)
- Supervised Hebbian Learning Advantages and DisadvantagesDokument6 SeitenSupervised Hebbian Learning Advantages and DisadvantagesMairos Kunze BongaNoch keine Bewertungen
- Back Analysis of Rock Mass Parameters and Initial Stress For The Longtan Tunnel in ChinaDokument19 SeitenBack Analysis of Rock Mass Parameters and Initial Stress For The Longtan Tunnel in ChinaJumadil SyamNoch keine Bewertungen
- ENVI Extensions in IDL: C.1 InstallationDokument17 SeitenENVI Extensions in IDL: C.1 InstallationOsman EjameNoch keine Bewertungen
- Load Forecasting Techniques and Methodologies A ReviewDokument10 SeitenLoad Forecasting Techniques and Methodologies A ReviewBasir Ahmad SafiNoch keine Bewertungen
- Artificial Intelligence and Library Development - Kwasu-2Dokument47 SeitenArtificial Intelligence and Library Development - Kwasu-2abdullahi abiodun dereNoch keine Bewertungen
- Using Artificial Neural Network Models in Stock Market Index Prediction PDFDokument9 SeitenUsing Artificial Neural Network Models in Stock Market Index Prediction PDFDavid DiazNoch keine Bewertungen