Das könnte Ihnen auch gefallen
- Introduction to the simulation of power plants for EBSILON®Professional Version 15Von EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Noch keine Bewertungen
- 6F35N IntroDokument47 Seiten6F35N Introacmemail583Noch keine Bewertungen
- 7-Speed Direct Shift Gearbox (DSG - 0AM) - Ross-Tech WikiDokument3 Seiten7-Speed Direct Shift Gearbox (DSG - 0AM) - Ross-Tech WikiVuk Krstajic100% (1)
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- 140h 5hm Pruebas y Ajustes de Transmision ElectronicaDokument28 Seiten140h 5hm Pruebas y Ajustes de Transmision ElectronicaSebastian Bonello100% (1)
- Steering InitializationDokument87 SeitenSteering Initializationomanstar120% (2)
- Speed Control - TDV6 3.0L DieselDokument18 SeitenSpeed Control - TDV6 3.0L DieselAlberto Mock GonzalesNoch keine Bewertungen
- EMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Dokument17 SeitenEMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Matias Contreras Köbrich100% (2)
- DV Mechanical Adjustment Manual: MechanismDokument53 SeitenDV Mechanical Adjustment Manual: Mechanismgried63Noch keine Bewertungen
- E39 Cruise ControlDokument6 SeitenE39 Cruise ControlGabriel CuvinciucNoch keine Bewertungen
- BL 2000 STB PDFDokument131 SeitenBL 2000 STB PDFTroubleshooting100% (2)
- PowerCom 3242756 PDFDokument8 SeitenPowerCom 3242756 PDFTaz UddinNoch keine Bewertungen
- Automatic Manual TransmissionDokument56 SeitenAutomatic Manual Transmissionrey1004100% (3)
- AC03 Pramac Operator Guide EnglishDokument7 SeitenAC03 Pramac Operator Guide Englishnicoss69100% (16)
- 828D Servo OptimisationDokument64 Seiten828D Servo OptimisationMateus Mugnol toigoNoch keine Bewertungen
- Rohde-Schwarz - Mustreads - Emc (2020 - 07 - 08 11 - 09 - 15 UTC)Dokument37 SeitenRohde-Schwarz - Mustreads - Emc (2020 - 07 - 08 11 - 09 - 15 UTC)konradNoch keine Bewertungen
- 160HDokument27 Seiten160Hmtocbv100% (3)
- H Pss TechnicalDokument16 SeitenH Pss TechnicalDawit Getachew MelsselNoch keine Bewertungen
- Voltage Dip CalculationDokument69 SeitenVoltage Dip CalculationCalvert WongNoch keine Bewertungen
- ESD5100 Series Speed Control UnitDokument2 SeitenESD5100 Series Speed Control Unitajcapetillog100% (2)
- D - Pro Action: Programmable FunctionsDokument11 SeitenD - Pro Action: Programmable FunctionsAngel Irka PaunovNoch keine Bewertungen
- 745 Cat EtDokument6 Seiten745 Cat EtLucky advantureNoch keine Bewertungen
- Manual GenconDokument97 SeitenManual GenconBruno MarianoNoch keine Bewertungen
- Lec 2.1 Network Topology Pros & ConsDokument15 SeitenLec 2.1 Network Topology Pros & ConsSuman JyotiNoch keine Bewertungen
- 5872 197 002 6 WG-310技术手册 PDFDokument63 Seiten5872 197 002 6 WG-310技术手册 PDFnksiavash100% (1)
- DTN0004 PID Idle ControlDokument3 SeitenDTN0004 PID Idle ControlshayNoch keine Bewertungen
- Motor Bee ManualDokument21 SeitenMotor Bee ManualGianniFisaNoch keine Bewertungen
- Challenger7 Fly by Wire - V100Dokument21 SeitenChallenger7 Fly by Wire - V100GustavoNoch keine Bewertungen
- Using HC900 Accutune IIIDokument3 SeitenUsing HC900 Accutune IIIthanh_cdt01Noch keine Bewertungen
- Infoplc Net Guide For Twincat NC ControlDokument19 SeitenInfoplc Net Guide For Twincat NC ControlPaul EspinosaNoch keine Bewertungen
- Logix SERCOS Tuning Tips v1.02 1Dokument6 SeitenLogix SERCOS Tuning Tips v1.02 1José AlanizNoch keine Bewertungen
- 5.5 Commissioning Using The BOPDokument4 Seiten5.5 Commissioning Using The BOPKundan SrivastavNoch keine Bewertungen
- Servo TuningDokument5 SeitenServo TuningIlhami DemirNoch keine Bewertungen
- FGDokument54 SeitenFGJulio C. SalinasNoch keine Bewertungen
- Servo Motor SystemDokument8 SeitenServo Motor SystemAnonymous Y7WZ3dqoXhNoch keine Bewertungen
- Chapter1 121210210811 Phpapp02Dokument57 SeitenChapter1 121210210811 Phpapp02sharkeraNoch keine Bewertungen
- Operators Manual For The Control Techniques PLC Iii Cut-to-Length Control SystemDokument79 SeitenOperators Manual For The Control Techniques PLC Iii Cut-to-Length Control Systemdorin serbanNoch keine Bewertungen
- 928TC eDokument113 Seiten928TC eGuillermo RamirezNoch keine Bewertungen
- MISVC Software User GuideDokument12 SeitenMISVC Software User Guidenbr67sceNoch keine Bewertungen
- Pajero 1991 Cruise Control SystemDokument28 SeitenPajero 1991 Cruise Control SystemnadaNoch keine Bewertungen
- 2092-At001 - En-P Ab Simple Motion Control PLC BasedDokument5 Seiten2092-At001 - En-P Ab Simple Motion Control PLC BasedCristopher EntenaNoch keine Bewertungen
- Edg5500 DigitalDokument3 SeitenEdg5500 DigitalDeibis Francisco Paredes HurtadoNoch keine Bewertungen
- Simple Tuning ASDA-A2&B2 Servo SystemsDokument41 SeitenSimple Tuning ASDA-A2&B2 Servo SystemsNu OlanlaNoch keine Bewertungen
- Ecm Gain SettingDokument2 SeitenEcm Gain SettingMuomen FarooqNoch keine Bewertungen
- DF Series 150 and 250 Electron Control System Ser. Man. Pn-Yz103052Dokument29 SeitenDF Series 150 and 250 Electron Control System Ser. Man. Pn-Yz103052Nerfs MendizabalNoch keine Bewertungen
- MD11-1 NC Controller Operation ManualDokument8 SeitenMD11-1 NC Controller Operation Manualjmilomir6512100% (1)
- Catalogo ServosDokument31 SeitenCatalogo ServosPablo JuanNoch keine Bewertungen
- PDF Created With Pdffactory Trial VersionDokument16 SeitenPDF Created With Pdffactory Trial VersionRubenNoch keine Bewertungen
- Computer Integrated Design and ManufacturingDokument16 SeitenComputer Integrated Design and ManufacturingPrajwal JaiswalNoch keine Bewertungen
- User Manual v2 9-AMC-AASD15A 4DOF+TL+Surge-SRS-SimtoolsDokument29 SeitenUser Manual v2 9-AMC-AASD15A 4DOF+TL+Surge-SRS-Simtoolsnelu petNoch keine Bewertungen
- Startup of A Synchronous non-SEW Motor Setting The Motor EncoderDokument21 SeitenStartup of A Synchronous non-SEW Motor Setting The Motor EncoderrezakaihaniNoch keine Bewertungen
- LCD Display ManualDokument8 SeitenLCD Display ManualrloopelectricalsolutionsNoch keine Bewertungen
- The NAG1 (5-Speed) Automatic TransmissionDokument4 SeitenThe NAG1 (5-Speed) Automatic TransmissionEdBunge100% (1)
- HGM1770Dokument16 SeitenHGM1770Thao Nguyen XuanNoch keine Bewertungen
- LCD S830 User ManualDokument9 SeitenLCD S830 User Manualhowet32126Noch keine Bewertungen
- Product - Support-Precor-Service Manuals-Commercial Treadmill-C956i (240 VAC) (Serial Code Z5)Dokument69 SeitenProduct - Support-Precor-Service Manuals-Commercial Treadmill-C956i (240 VAC) (Serial Code Z5)Gabino Ubilio MurilloNoch keine Bewertungen
- EML System On BMW 12cyl Engines - Theory of OpsDokument6 SeitenEML System On BMW 12cyl Engines - Theory of OpsDOMINO66Noch keine Bewertungen
- 2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTDokument14 Seiten2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTAdamNoch keine Bewertungen
- Presentation ON Programmble Logical Device (PLC) AT Automation SystemDokument24 SeitenPresentation ON Programmble Logical Device (PLC) AT Automation SystemChandni MehtaNoch keine Bewertungen
- TE804Dokument38 SeitenTE804byronsmart100% (2)
- Installation and Operation Manual For E4OD/4R100 TransmissionsDokument27 SeitenInstallation and Operation Manual For E4OD/4R100 TransmissionsJou PowerNoch keine Bewertungen
- 150-SMC50 Arrancadores Estáticos PDFDokument58 Seiten150-SMC50 Arrancadores Estáticos PDFcamel2003Noch keine Bewertungen
- C H1 H6 Manual Jan.2021Dokument7 SeitenC H1 H6 Manual Jan.2021RadNoch keine Bewertungen
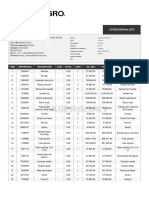
- COT-ASERGRO-NUMERO-2270 BarrazaDokument2 SeitenCOT-ASERGRO-NUMERO-2270 Barrazasandra ariasNoch keine Bewertungen
- EPIC - III Function: Power ServiceDokument20 SeitenEPIC - III Function: Power ServiceTushar Kanta MahakulNoch keine Bewertungen
- Seatel Dac-2200 Operation PDFDokument76 SeitenSeatel Dac-2200 Operation PDFIonut NeamtuNoch keine Bewertungen
- User Manual en d70 Data ControlDokument88 SeitenUser Manual en d70 Data ControlMilandou Toudet BarthèseNoch keine Bewertungen
- Lecture 3Dokument17 SeitenLecture 3Singam SridharNoch keine Bewertungen
- Sub Placement Guide - Rev ADokument19 SeitenSub Placement Guide - Rev AKrshankaShettyNoch keine Bewertungen
- Cat 14h MotorgraderDokument2 SeitenCat 14h MotorgraderAshraf m aliNoch keine Bewertungen
- DS86 CPGK PDFDokument3 SeitenDS86 CPGK PDFLizbeth TrujilloNoch keine Bewertungen
- Converting The Signal Output of A DC Accelerometer To Acceleration (G)Dokument2 SeitenConverting The Signal Output of A DC Accelerometer To Acceleration (G)ierasterNoch keine Bewertungen
- B Side: N7Tw - Power.Pcb 1LG4B10Y04300Dokument2 SeitenB Side: N7Tw - Power.Pcb 1LG4B10Y04300Dario EzequielNoch keine Bewertungen
- VSD 2021 HW1 Explanation Ver1.2Dokument24 SeitenVSD 2021 HW1 Explanation Ver1.2N26112372崔哲瑋Noch keine Bewertungen
- Ena2232 D 1Dokument5 SeitenEna2232 D 1Abdul RahmanNoch keine Bewertungen
- GF-30136C-EN - CXT-IR Wireless Detector - 2pLetterBro - 0Dokument2 SeitenGF-30136C-EN - CXT-IR Wireless Detector - 2pLetterBro - 0Sumesh FOSEnergyNoch keine Bewertungen
- Eeprom 29c040Dokument13 SeitenEeprom 29c040api-3710567Noch keine Bewertungen
- Standard and Technical Specifications of The Security Systems by SIRADokument31 SeitenStandard and Technical Specifications of The Security Systems by SIRASuhaib Al NajjarNoch keine Bewertungen
- FNC 208L PDFDokument4 SeitenFNC 208L PDFmeganemesisNoch keine Bewertungen
- Comf2167 Pss en - IdDokument9 SeitenComf2167 Pss en - IdMuhammad Nur RokimNoch keine Bewertungen
- Eaton Harmonic Correction Unit Brochure PA157001ENDokument4 SeitenEaton Harmonic Correction Unit Brochure PA157001ENmohsin shaikhNoch keine Bewertungen
- Microprocessor Systems Handouts 2013Dokument85 SeitenMicroprocessor Systems Handouts 2013yunus memonNoch keine Bewertungen
- Tl494. Circuito Integrado PWM PDFDokument20 SeitenTl494. Circuito Integrado PWM PDFMiguel Angel Medina MezaNoch keine Bewertungen
- Ec8501 Question BankDokument13 SeitenEc8501 Question BankmerlineNoch keine Bewertungen
- Rohini 96440522279Dokument4 SeitenRohini 96440522279Swapnil AmbadNoch keine Bewertungen
- LightningPick PLC BridgeDokument4 SeitenLightningPick PLC BridgeczarbjNoch keine Bewertungen
- JVC KD-G820 User ManualDokument352 SeitenJVC KD-G820 User ManualfunkenfunkNoch keine Bewertungen
- Problem Set 1 Fundamentals of Energy ConversionDokument1 SeiteProblem Set 1 Fundamentals of Energy Conversionrebecca pullitan100% (1)