Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Invoicing System v2Dokument26 SeitenInvoicing System v2api-137303031Noch keine Bewertungen
- Slides Adapted From: Foundations of Computer Science, Behrouz ForouzanDokument21 SeitenSlides Adapted From: Foundations of Computer Science, Behrouz Forouzanahmad alkasajiNoch keine Bewertungen
- U03-Exception HandlingDokument22 SeitenU03-Exception Handlingdhyan114Noch keine Bewertungen
- XW PRO UL9540 Energy Storage Systems InformationDokument7 SeitenXW PRO UL9540 Energy Storage Systems InformationMujeeb Ur Rehman KhalilNoch keine Bewertungen
- Configuring SNMP On ProteusDokument12 SeitenConfiguring SNMP On ProteusAijaz MirzaNoch keine Bewertungen
- Mechanical Au 3-1Dokument10 SeitenMechanical Au 3-1Venkata Sai Kumar NunnaNoch keine Bewertungen
- Automotive Processors: "Jacinto 6 Plus"Dokument2 SeitenAutomotive Processors: "Jacinto 6 Plus"david tangNoch keine Bewertungen
- Welcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)Dokument19 SeitenWelcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)SURESH SNoch keine Bewertungen
- Koyo DL205 Power CalculationDokument2 SeitenKoyo DL205 Power CalculationiedmondNoch keine Bewertungen
- A Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDokument11 SeitenA Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDaniel FernándezNoch keine Bewertungen
- CUSTOM - PLL in FormsDokument10 SeitenCUSTOM - PLL in FormsBhargi111Noch keine Bewertungen
- Cube Iwork10 Flashing GuideDokument11 SeitenCube Iwork10 Flashing Guideandrianaivo.rmanNoch keine Bewertungen
- CH 9Dokument63 SeitenCH 9alapabainviNoch keine Bewertungen
- Japanese & Korean Skincare QuizDokument1 SeiteJapanese & Korean Skincare Quizhi143Noch keine Bewertungen
- Let'S Learn Algebra in Earl'S Way The Easy Way!Dokument23 SeitenLet'S Learn Algebra in Earl'S Way The Easy Way!Cristinejoy OletaNoch keine Bewertungen
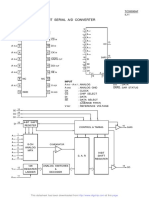
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODokument1 SeiteC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangNoch keine Bewertungen
- Industrial Report On InfosysDokument14 SeitenIndustrial Report On InfosysMitesh ChauhanNoch keine Bewertungen
- Comparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar InvertersDokument5 SeitenComparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar Invertersmirko.tNoch keine Bewertungen
- MC Line: Multifunction Three Phase Overvoltage / Undervoltage RelayDokument3 SeitenMC Line: Multifunction Three Phase Overvoltage / Undervoltage RelayCerduardo Chanchisco Roga RojasNoch keine Bewertungen
- Internet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameDokument42 SeitenInternet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameMAFOQ UL HASSANNoch keine Bewertungen
- ECP 11-0209 Interlocks Test Form: 1 General DataDokument3 SeitenECP 11-0209 Interlocks Test Form: 1 General DataHimdad TahirNoch keine Bewertungen
- Updates From The Eastern Cape Department of EducationDokument1 SeiteUpdates From The Eastern Cape Department of EducationSundayTimesZANoch keine Bewertungen
- A380-LEVEL I - ATA 31 Indicating - Recording SystemsDokument70 SeitenA380-LEVEL I - ATA 31 Indicating - Recording SystemsGuy100% (1)
- Opentext Capture Recognition Engine Release NotesDokument15 SeitenOpentext Capture Recognition Engine Release NotesHimanshi GuptaNoch keine Bewertungen
- In The Design of A Relational Database Management SystemDokument5 SeitenIn The Design of A Relational Database Management SystemKumbham AbhijitNoch keine Bewertungen
- Ideapad 330 15intel Platform SpecificationsDokument1 SeiteIdeapad 330 15intel Platform Specificationslegatus2yahoo.grNoch keine Bewertungen
- Lind17e Chapter02 TBDokument22 SeitenLind17e Chapter02 TBdockmom4Noch keine Bewertungen
- 161-Gyro IXblue Quadrans User Manual 1-10-2014Dokument31 Seiten161-Gyro IXblue Quadrans User Manual 1-10-2014Jean-Guy PaulNoch keine Bewertungen
- Fundamentals of Computer VisionDokument386 SeitenFundamentals of Computer VisionKosh BNoch keine Bewertungen