Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- FeynmanotesDokument2 SeitenFeynmanotesapi-265040900% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Lecture 3, Blackboard #1Dokument6 SeitenLecture 3, Blackboard #1api-26504090Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- RolfDokument1 SeiteRolfapi-26504090100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Physics of Stone SkippingDokument7 SeitenThe Physics of Stone Skippingapi-26504090100% (1)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- CETOL TutorialDokument15 SeitenCETOL TutorialAnandh VairakkannuNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Me 8951Dokument49 SeitenMe 8951JHONNATHANCOLMENARESNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- 2 DviewingDokument50 Seiten2 DviewingNivedita k100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- CHAPTER 7-Angular MotionDokument15 SeitenCHAPTER 7-Angular MotionLesther James CastroNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
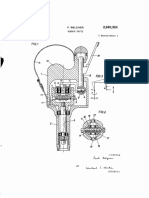
- US2940324 - Wobble Mechanism (Scraper)Dokument4 SeitenUS2940324 - Wobble Mechanism (Scraper)devheadbotNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Gatka MovesDokument10 SeitenGatka MovesajnasinghNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Classical Dynamics: Example Sheet 3: A Ab B ADokument3 SeitenClassical Dynamics: Example Sheet 3: A Ab B A김승수Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- X RAY AlignmentDokument28 SeitenX RAY AlignmentAndreas DurerNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Phys 111 Final Exam Formulas - Fall 2011: DT DWDokument1 SeitePhys 111 Final Exam Formulas - Fall 2011: DT DWVenkataramanan SureshNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- InTech-Omnidirectional Mobile Robot Design and ImplementationDokument18 SeitenInTech-Omnidirectional Mobile Robot Design and ImplementationSenthil KumarNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Robotics LabDokument7 SeitenRobotics LabAbdul Moiz QarniNoch keine Bewertungen
- Slope Deflection Method SDMDokument14 SeitenSlope Deflection Method SDMJaymark SorianoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Triad y QuestDokument8 SeitenTriad y Questanterog6Noch keine Bewertungen
- Solution Manual For Astronomy Today 8 e 8th Edition Eric Chaisson Steve McmillanDokument14 SeitenSolution Manual For Astronomy Today 8 e 8th Edition Eric Chaisson Steve McmillanEmmett Leach100% (30)
- CM AllDokument57 SeitenCM AllMarcelo PirôpoNoch keine Bewertungen
- Flash Math Creativity Book SampleDokument10 SeitenFlash Math Creativity Book SamplePredrag VucinicNoch keine Bewertungen
- Ultimate Physics Cheat SheetDokument2 SeitenUltimate Physics Cheat SheetNehal VoraNoch keine Bewertungen
- Arbitrary Axis RotationDokument6 SeitenArbitrary Axis RotationSunil SharmaNoch keine Bewertungen
- AP SCERT 1-4 HighlightedDokument41 SeitenAP SCERT 1-4 Highlightedyamuna0% (1)
- 11 Rotation and TorqueDokument94 Seiten11 Rotation and TorquePutri S100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Orion Standard Training Manual For EngineerDokument239 SeitenOrion Standard Training Manual For EngineerPark WaNoch keine Bewertungen
- 04a ENSC 488W DH ParametersContinued 2024 AnnotatedDokument5 Seiten04a ENSC 488W DH ParametersContinued 2024 Annotatedaarea3Noch keine Bewertungen
- NCERT 6th STD GeographyDokument68 SeitenNCERT 6th STD GeographyPhaniDeepNoch keine Bewertungen
- 000 - MSC Physics-Curriculum 21.06.2016Dokument47 Seiten000 - MSC Physics-Curriculum 21.06.2016Vijay SinghNoch keine Bewertungen
- 200 More Puzzling Physics-AprofundamentoDokument21 Seiten200 More Puzzling Physics-AprofundamentoPaulo CesarNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Trigonometric R Atios & Identities: JEE-MathematicsDokument15 SeitenTrigonometric R Atios & Identities: JEE-MathematicsAnanmay ChauhanNoch keine Bewertungen
- Mechanics of Baseball Pitching and BattingDokument44 SeitenMechanics of Baseball Pitching and BattingDonnie AshleyNoch keine Bewertungen
- 1 Box MatDokument107 Seiten1 Box MatAnonymous hCYc36Noch keine Bewertungen
- Sine Rule QuestionsDokument2 SeitenSine Rule QuestionsClaireNoch keine Bewertungen
- Building Assemblies With Mates: Creating An AssemblyDokument20 SeitenBuilding Assemblies With Mates: Creating An AssemblyDejanNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)