Das könnte Ihnen auch gefallen
- 2004 D 2.9 MFI Control System (Diesel) Schematic DiagramsDokument1 Seite2004 D 2.9 MFI Control System (Diesel) Schematic DiagramsHuynh Quoc VietNoch keine Bewertungen
- ME401 Engine PerformanceDokument3 SeitenME401 Engine PerformanceHuynh Quoc VietNoch keine Bewertungen
- Heä Thoáng Ñieàu Khieån Chieàu Daøi Ñöôøng Oáng Naïp: (ACIS)Dokument6 SeitenHeä Thoáng Ñieàu Khieån Chieàu Daøi Ñöôøng Oáng Naïp: (ACIS)Huynh Quoc VietNoch keine Bewertungen
- Preface 1. Review of ICEDokument15 SeitenPreface 1. Review of ICEHuynh Quoc VietNoch keine Bewertungen
- Elec04 PDFDokument42 SeitenElec04 PDFHuynh Quoc VietNoch keine Bewertungen
- 1.vehicle Brought To Workshop: 1Gr-Fe Engine Control Sfi System How To Proceed With TroubleshootingDokument3 Seiten1.vehicle Brought To Workshop: 1Gr-Fe Engine Control Sfi System How To Proceed With TroubleshootingHuynh Quoc VietNoch keine Bewertungen
- LN11 PDFDokument87 SeitenLN11 PDFHuynh Quoc VietNoch keine Bewertungen
- Application of Genetic Algorithm For Optimization of Control Strategy in Parallel Hybrid Electric VehiclesDokument16 SeitenApplication of Genetic Algorithm For Optimization of Control Strategy in Parallel Hybrid Electric VehiclesHuynh Quoc VietNoch keine Bewertungen
- A Novel Power-Train Using Coaxial Magnetic Gear For Power-Split Hybrid Electric VehiclesDokument6 SeitenA Novel Power-Train Using Coaxial Magnetic Gear For Power-Split Hybrid Electric VehiclesHuynh Quoc VietNoch keine Bewertungen
- Ch1 OPT Introduction 1Dokument8 SeitenCh1 OPT Introduction 1Huynh Quoc VietNoch keine Bewertungen
- HyperView TutorialsDokument88 SeitenHyperView Tutorialsapi-3717939Noch keine Bewertungen
- Fea HW3 Hviet 3Dokument7 SeitenFea HW3 Hviet 3Huynh Quoc VietNoch keine Bewertungen
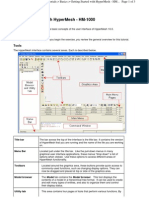
- Getting Started With Hypermesh - Hm-1000: Title BarDokument3 SeitenGetting Started With Hypermesh - Hm-1000: Title BarHuynh Quoc VietNoch keine Bewertungen
- Geometry and Mesh Editing Usin.Dokument6 SeitenGeometry and Mesh Editing Usin.Huynh Quoc VietNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- D25a Parts Catalog #7745010Dokument177 SeitenD25a Parts Catalog #7745010Peskishev Konstantin100% (1)
- 2.13 Specific Emissions and Emissions Index: M EI M M EI M M EI MDokument5 Seiten2.13 Specific Emissions and Emissions Index: M EI M M EI M M EI MOscar BallartaNoch keine Bewertungen
- V80703 Detroit Diesel Series 40 Parts CatalogueDokument152 SeitenV80703 Detroit Diesel Series 40 Parts CatalogueJeiro Ney Vargas Zarate100% (3)
- B-34 Engine Control System: Circuit DiagramDokument6 SeitenB-34 Engine Control System: Circuit Diagramlutfi shuibNoch keine Bewertungen
- Quincy QR25 Model310Dokument38 SeitenQuincy QR25 Model310Ammar Omran100% (1)
- Automotive Control Systems Cambridge PressDokument406 SeitenAutomotive Control Systems Cambridge PressStefan Roman100% (2)
- CATALOGO DE PEÇAS KOMATSU PC 200 - PC 200LC-8 Maquina BaseDokument443 SeitenCATALOGO DE PEÇAS KOMATSU PC 200 - PC 200LC-8 Maquina BaseBruno Jonatas Mendes100% (2)
- Series 90 55 CC Pump Parts ManualDokument120 SeitenSeries 90 55 CC Pump Parts ManualJulio Alberto Mendez100% (4)
- Stress Analysis and Design Optimization of CrankpinDokument3 SeitenStress Analysis and Design Optimization of CrankpinAshokNoch keine Bewertungen
- FMP - 617 Farm Mechanization Practical 1Dokument9 SeitenFMP - 617 Farm Mechanization Practical 1رانا ریحان انور خاںNoch keine Bewertungen
- Bx22d Parts Book1Dokument314 SeitenBx22d Parts Book1BlakeNoch keine Bewertungen
- Volvo Penta Inboard Diesel: 125-147-162 KW (170-200-220 HP) Crankshaft Power Acc. To ISO 8665Dokument2 SeitenVolvo Penta Inboard Diesel: 125-147-162 KW (170-200-220 HP) Crankshaft Power Acc. To ISO 8665Alberto100% (1)
- Scoping Secondary Ignition Systemsvandenbrink10Dokument7 SeitenScoping Secondary Ignition Systemsvandenbrink10enjpetNoch keine Bewertungen
- Fire Water Pumps For CPI Facilities (CE)Dokument4 SeitenFire Water Pumps For CPI Facilities (CE)jdgh1986Noch keine Bewertungen
- Developments in IC EnginesDokument41 SeitenDevelopments in IC EnginesRohit K Murthy67% (3)
- SSP 099 18 Tfsi 132kw 20 Tfsi 162kw Ea888Dokument60 SeitenSSP 099 18 Tfsi 132kw 20 Tfsi 162kw Ea888Jose Ramón Orenes ClementeNoch keine Bewertungen
- Aveo 2018 2Dokument2 SeitenAveo 2018 2luisantoniobocanegralonaNoch keine Bewertungen
- Manual de Servicio Deutz PDFDokument82 SeitenManual de Servicio Deutz PDFDaniel Castillo Peña100% (1)
- Briggs and Stratton Shop ManualDokument3 SeitenBriggs and Stratton Shop ManualJeffreyNoch keine Bewertungen
- D-155 - 3 Cylinder Diesel Engine (01/75 - 12/85) 00 - Complete Machine 11-123 - Injection PumpDokument7 SeitenD-155 - 3 Cylinder Diesel Engine (01/75 - 12/85) 00 - Complete Machine 11-123 - Injection PumpMANUALESNoch keine Bewertungen
- Actros Electronic SystemsDokument1 SeiteActros Electronic SystemsAhmed Abbas Al Gebaly100% (1)
- Datos Oreda Modos de Falla Parte MantenibleDokument135 SeitenDatos Oreda Modos de Falla Parte MantenibleCarlos Jose Sibaja Cardozo100% (1)
- 6.4L - Power Stroke EngineDokument16 Seiten6.4L - Power Stroke EngineRuben Michel100% (2)
- Product 16V4000G83Dokument26 SeitenProduct 16V4000G83MahnooshNoch keine Bewertungen
- FORD D FaultCodes 0366 PDFDokument1 SeiteFORD D FaultCodes 0366 PDFIacob MargineanNoch keine Bewertungen
- lt4 Erod Engine Installation Guide 19356048 19417727Dokument83 Seitenlt4 Erod Engine Installation Guide 19356048 19417727Carl YelvingtonNoch keine Bewertungen
- Cat Dcs Sis ControllerDokument2 SeitenCat Dcs Sis ControllerHector Eli SaucedoNoch keine Bewertungen
- PC220-8M0-Serial No.Y221001 and UpDokument640 SeitenPC220-8M0-Serial No.Y221001 and UpRashid MahmoodNoch keine Bewertungen
- PN3116Dokument6 SeitenPN3116Alfonso RivasNoch keine Bewertungen
- Audi 2012 A6Dokument60 SeitenAudi 2012 A6Sami100% (1)