Das könnte Ihnen auch gefallen
- ScadaDokument5 SeitenScadaDaniel Taiti KimathiNoch keine Bewertungen
- A Simplified System For Subsynchronous Resonance StudiesDokument6 SeitenA Simplified System For Subsynchronous Resonance StudiesSherif HelmyNoch keine Bewertungen
- Sub Synchronous Resonance Damping in Interconnected Power SystemsDokument4 SeitenSub Synchronous Resonance Damping in Interconnected Power Systemsapi-3697505100% (1)
- Frequency Control Concerns in The North American Electric Power SystemDokument32 SeitenFrequency Control Concerns in The North American Electric Power SystempongpumNoch keine Bewertungen
- 0780353501book SSRDokument25 Seiten0780353501book SSRapi-3697505Noch keine Bewertungen
- Stand-Alone Power Systems For The FutureDokument1 SeiteStand-Alone Power Systems For The Futureapi-3697505Noch keine Bewertungen
- Interconnected System Frequency ResponseDokument5 SeitenInterconnected System Frequency Responseapi-3697505100% (1)
- Time Varying Load Analysis To Reduce Distribution Losses Through ReconfigurationDokument7 SeitenTime Varying Load Analysis To Reduce Distribution Losses Through Reconfigurationapi-3697505100% (1)
- Top-Down or Bottom Up ApproachDokument7 SeitenTop-Down or Bottom Up Approachapi-3697505100% (2)
- Scada 1Dokument19 SeitenScada 1api-3741873Noch keine Bewertungen
- Planning of Distribution Substations, Feeders and Sectionalizing Switches Using Heuristic AlgoritDokument8 SeitenPlanning of Distribution Substations, Feeders and Sectionalizing Switches Using Heuristic Algoritapi-3697505Noch keine Bewertungen
- Optimal Network Reconfiguration of Electrical Distribution SystemsDokument6 SeitenOptimal Network Reconfiguration of Electrical Distribution Systemsapi-3697505Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Mobile CommerceDokument47 SeitenMobile CommerceMichael DawkinsNoch keine Bewertungen
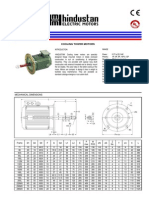
- Cooling Tower MotorDokument2 SeitenCooling Tower MotorDipendraTomarNoch keine Bewertungen
- Zte Mg3030 ModuleDokument27 SeitenZte Mg3030 Modulesardar87Noch keine Bewertungen
- Configuring SNMP On ProteusDokument12 SeitenConfiguring SNMP On ProteusAijaz MirzaNoch keine Bewertungen
- ServiceNow - CIS-ITSM - by .Koenzy.53qDokument15 SeitenServiceNow - CIS-ITSM - by .Koenzy.53qshailesh bachhavNoch keine Bewertungen
- 802 1BR-2012 PDFDokument135 Seiten802 1BR-2012 PDFSidney AlvesNoch keine Bewertungen
- Joaquín Vélez: 1 HOTEL CENTRAL PARK - NYC - Construction EngineerDokument2 SeitenJoaquín Vélez: 1 HOTEL CENTRAL PARK - NYC - Construction EngineerVaé RiberaNoch keine Bewertungen
- Hgu56 ManualDokument86 SeitenHgu56 ManualRedgy Geryl0% (1)
- Construction:: Retenax Flam RVMV 0,6/1Kv Npi-C orDokument2 SeitenConstruction:: Retenax Flam RVMV 0,6/1Kv Npi-C ormehdi HKNoch keine Bewertungen
- File 000096Dokument196 SeitenFile 000096Wahyu PranataNoch keine Bewertungen
- LiveOptics TroubleshootingTraceDokument2 SeitenLiveOptics TroubleshootingTraceOscarNoch keine Bewertungen
- Compiling A C Program - Behind The ScenesDokument2 SeitenCompiling A C Program - Behind The ScenesKrishanu ModakNoch keine Bewertungen
- Registre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaDokument20 SeitenRegistre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaJairo RodriguesNoch keine Bewertungen
- Waaree Corporate PPT - V3Dokument53 SeitenWaaree Corporate PPT - V3Bhushan MalsheNoch keine Bewertungen
- Certificado Apc Iso 14001-2004 PDFDokument4 SeitenCertificado Apc Iso 14001-2004 PDFMao MartinNoch keine Bewertungen
- TractorsDokument12 SeitenTractorsBekalu DanielNoch keine Bewertungen
- Gentsuki Untenmenkyo Japanese Edition E BookDokument4 SeitenGentsuki Untenmenkyo Japanese Edition E BookEuNoch keine Bewertungen
- TN - SP021 - E1 - 0 Call Flow and Supplementary Service Flow in CS Domain-65Dokument62 SeitenTN - SP021 - E1 - 0 Call Flow and Supplementary Service Flow in CS Domain-65Tanzyy.2018Noch keine Bewertungen
- LC320W01 Sla1Dokument33 SeitenLC320W01 Sla1Robert TocaNoch keine Bewertungen
- Unit 2Dokument17 SeitenUnit 2PRASATH RNoch keine Bewertungen
- DB 0032400 enDokument2 SeitenDB 0032400 enMihai BancuNoch keine Bewertungen
- CNC Programming & Application: Federal TVET Institute Manufacturing Technology Department Addis Abeba EthiopiaDokument58 SeitenCNC Programming & Application: Federal TVET Institute Manufacturing Technology Department Addis Abeba EthiopiaGezae MebrahtuNoch keine Bewertungen
- Discussion NTM2Dokument2 SeitenDiscussion NTM2neenoonaaNoch keine Bewertungen
- MELFA Vision Instruction ManualDokument166 SeitenMELFA Vision Instruction ManualJames JdfNoch keine Bewertungen
- Data Flow Diagram Level-0: Health Insurance System Customer InsurerDokument1 SeiteData Flow Diagram Level-0: Health Insurance System Customer InsurerVarun DhimanNoch keine Bewertungen
- Sam Carlton CVDokument1 SeiteSam Carlton CVsam_carlton_4Noch keine Bewertungen
- DS-2TD2617-3/V1 Thermal & Optical Network Bullet Camera: Smart Function (Thermal Imaging)Dokument5 SeitenDS-2TD2617-3/V1 Thermal & Optical Network Bullet Camera: Smart Function (Thermal Imaging)Dávid DobóNoch keine Bewertungen
- Data Link Communications Description and OperationDokument1 SeiteData Link Communications Description and Operation08088338Noch keine Bewertungen
- Advanced Product Quality Planning (APQP)Dokument15 SeitenAdvanced Product Quality Planning (APQP)José AlcocerNoch keine Bewertungen
- Express Specialization RequirementsDokument8 SeitenExpress Specialization RequirementsZeus TitanNoch keine Bewertungen