Das könnte Ihnen auch gefallen
- Seminar on Micro-Local Analysis. (AM-93), Volume 93Von EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Noch keine Bewertungen
- Derivation of Orbits in Inverse Square Law Force Fields: Force Center (Also The Coordinate Center)Dokument6 SeitenDerivation of Orbits in Inverse Square Law Force Fields: Force Center (Also The Coordinate Center)Epic WinNoch keine Bewertungen
- Circuit Resonances: Small ResistanceDokument8 SeitenCircuit Resonances: Small ResistanceEpic WinNoch keine Bewertungen
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsVon EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNoch keine Bewertungen
- Damped Mechanical Oscillations: Mass, M Spring (Stiffness, K) XDokument8 SeitenDamped Mechanical Oscillations: Mass, M Spring (Stiffness, K) XEpic WinNoch keine Bewertungen
- Fourier Series and Integrals: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument12 SeitenFourier Series and Integrals: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyVon EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyBewertung: 3 von 5 Sternen3/5 (2)
- Meanvalue A: Wave Functions, Probability, and Mean ValuesDokument10 SeitenMeanvalue A: Wave Functions, Probability, and Mean ValuesEpic WinNoch keine Bewertungen
- Seminar Report On LFD PDFDokument26 SeitenSeminar Report On LFD PDFSUDEEP SAHANoch keine Bewertungen
- X n+1 Anxn + bnxn-1: The Numerov Algorithm For Satellite OrbitsDokument6 SeitenX n+1 Anxn + bnxn-1: The Numerov Algorithm For Satellite OrbitsEpic WinNoch keine Bewertungen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Taylor'S Polynomial Approximation For FunctionsDokument8 SeitenTaylor'S Polynomial Approximation For FunctionsEpic WinNoch keine Bewertungen
- Fourier Analysis and Wave Packets: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument4 SeitenFourier Analysis and Wave Packets: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- Relativistic Energy Reaction Thresholds, Binding EnergiesDokument8 SeitenRelativistic Energy Reaction Thresholds, Binding EnergiesEpic WinNoch keine Bewertungen
- Electricity and Magnetism: Magnetostatics Induction, Vector PotentialDokument6 SeitenElectricity and Magnetism: Magnetostatics Induction, Vector PotentialEpic WinNoch keine Bewertungen
- A Practical Introduction To The Lattice Boltzmann MethodDokument46 SeitenA Practical Introduction To The Lattice Boltzmann MethodJuan Guillermo Restrepo CanoNoch keine Bewertungen
- Simple Differentiation and IntegrationDokument16 SeitenSimple Differentiation and IntegrationDragos FotacheNoch keine Bewertungen
- Derivation of The Constants of The Motion For Central ForcesDokument6 SeitenDerivation of The Constants of The Motion For Central ForcesEpic WinNoch keine Bewertungen
- The Interference of Two Coherent Wave SourcesDokument14 SeitenThe Interference of Two Coherent Wave SourcesEpic WinNoch keine Bewertungen
- Classical Mechanics: Driven OscillationsDokument4 SeitenClassical Mechanics: Driven OscillationsEpic WinNoch keine Bewertungen
- QMSDM Part2 Solutions 8 13Dokument75 SeitenQMSDM Part2 Solutions 8 13Kelly WeermanNoch keine Bewertungen
- Coupled Oscillators An Informative Problem SolvingDokument11 SeitenCoupled Oscillators An Informative Problem SolvingPedrito RGNoch keine Bewertungen
- Mat Lab Beam DeflectionDokument15 SeitenMat Lab Beam Deflectionriyyo2424Noch keine Bewertungen
- An Interference Project: CalculatorDokument8 SeitenAn Interference Project: CalculatorEpic WinNoch keine Bewertungen
- Numerical Integration: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument10 SeitenNumerical Integration: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- Relativity: Tensor AnalysisDokument4 SeitenRelativity: Tensor AnalysisEpic WinNoch keine Bewertungen
- The Particleincell MethodDokument29 SeitenThe Particleincell MethodAntonio JuarezNoch keine Bewertungen
- BUSSTEPP 2016 Lecture Notes Exact Wilsonian RenormalizationDokument24 SeitenBUSSTEPP 2016 Lecture Notes Exact Wilsonian Renormalizationzcapg17Noch keine Bewertungen
- Fourth Sem IT Dept PDFDokument337 SeitenFourth Sem IT Dept PDFSangeeta PalNoch keine Bewertungen
- Foundations of Quantum MechanicsDokument35 SeitenFoundations of Quantum MechanicsYi ChaiNoch keine Bewertungen
- PQT NotesDokument337 SeitenPQT NotesDot Kidman100% (1)
- Rectangular Potentials: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument4 SeitenRectangular Potentials: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- Matrix Algebra: G 0 + B G 1 0 + B G 0 G (MC+P) 0 PDokument6 SeitenMatrix Algebra: G 0 + B G 1 0 + B G 0 G (MC+P) 0 PEpic WinNoch keine Bewertungen
- Dynsmics of Aerospace Structures LectureDokument392 SeitenDynsmics of Aerospace Structures LecturevanmiloNoch keine Bewertungen
- Dispersion Relation Derivation PDFDokument12 SeitenDispersion Relation Derivation PDFKartikay5Noch keine Bewertungen
- Computational Inelasticity (MEC 9) : Lecture Notes Master Course in Computational MechanicsDokument19 SeitenComputational Inelasticity (MEC 9) : Lecture Notes Master Course in Computational MechanicsSanjay KumarNoch keine Bewertungen
- Atomic and Laser Physics: PH-102 (Physics) : B. Tech. - I Year Spring Semester: 2006-07 Tutorial Sheet No. 3Dokument2 SeitenAtomic and Laser Physics: PH-102 (Physics) : B. Tech. - I Year Spring Semester: 2006-07 Tutorial Sheet No. 3Tegar Wicaksana AdiansyachNoch keine Bewertungen
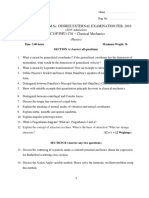
- First Semester M.Sc. Degree External Examination Feb. 2016: CC15P PHY1 C01 - Classical MechanicsDokument16 SeitenFirst Semester M.Sc. Degree External Examination Feb. 2016: CC15P PHY1 C01 - Classical MechanicsArdraNoch keine Bewertungen
- Solved ProblemsDokument43 SeitenSolved ProblemsTamara HerediaNoch keine Bewertungen
- Unruh Effect: Thomas Reichenb AcherDokument11 SeitenUnruh Effect: Thomas Reichenb Acherpas2066Noch keine Bewertungen
- Time-Dependent Perturbations I: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument5 SeitenTime-Dependent Perturbations I: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- The Lorentz Oscillator and Its ApplicationsDokument34 SeitenThe Lorentz Oscillator and Its Applicationsmiteya23Noch keine Bewertungen
- Harmonic Oscillation, Komang SuardikaDokument125 SeitenHarmonic Oscillation, Komang SuardikaKomang SuardikaNoch keine Bewertungen
- Probability and Queuing Theory - Question Bank.Dokument21 SeitenProbability and Queuing Theory - Question Bank.prooban67% (3)
- Inverted Pendulum 1Dokument21 SeitenInverted Pendulum 1ricardoxcmNoch keine Bewertungen
- Classical Mechanics: Central Force MotionDokument6 SeitenClassical Mechanics: Central Force MotionEpic WinNoch keine Bewertungen
- Foundations of Quantum MechanicsDokument35 SeitenFoundations of Quantum MechanicsAndi ZaidanNoch keine Bewertungen
- Exemple of Offshore Structures CalculationDokument25 SeitenExemple of Offshore Structures Calculationwlueji100% (1)
- ExercisesDokument15 SeitenExercisesMario XiaoNoch keine Bewertungen
- Resonances and Poles Real and Imaginary WorldsDokument6 SeitenResonances and Poles Real and Imaginary WorldsEpic WinNoch keine Bewertungen
- Hasbun PosterDokument21 SeitenHasbun PosterSuhailUmarNoch keine Bewertungen
- Ordinary and Super-Ball Bounces: X X X yDokument6 SeitenOrdinary and Super-Ball Bounces: X X X yEpic WinNoch keine Bewertungen
- Quantum Tunnelling: ReboundingDokument12 SeitenQuantum Tunnelling: ReboundingEpic WinNoch keine Bewertungen
- In StantonsDokument63 SeitenIn StantonsSrinivas Rau100% (1)
- Modal Analysis Odf CFRP PanelDokument21 SeitenModal Analysis Odf CFRP Paneldimos dimouNoch keine Bewertungen
- As Physics ISP MechanicsDokument41 SeitenAs Physics ISP Mechanicsnazran68Noch keine Bewertungen
- Warning Signs of A Possible Collapse of Contemporary MathematicsDokument12 SeitenWarning Signs of A Possible Collapse of Contemporary MathematicsEpic WinNoch keine Bewertungen
- InequalitiesDokument192 SeitenInequalitiesEpic Win100% (2)
- Mathematics and The Mind: Nelson/papers - HTMLDokument6 SeitenMathematics and The Mind: Nelson/papers - HTMLEpic WinNoch keine Bewertungen
- RomeDokument7 SeitenRomeEpic WinNoch keine Bewertungen
- Syntax and Semantics: WWW - Math.princeton - Edu Nelson Papers - HTMLDokument7 SeitenSyntax and Semantics: WWW - Math.princeton - Edu Nelson Papers - HTMLEpic WinNoch keine Bewertungen
- The Mystery of Stochastic MechanicsDokument18 SeitenThe Mystery of Stochastic MechanicsEpic WinNoch keine Bewertungen
- Nelson BibDokument5 SeitenNelson BibEpic WinNoch keine Bewertungen
- Hilbert's Mistake: Edward Nelson Department of Mathematics Princeton UniversityDokument27 SeitenHilbert's Mistake: Edward Nelson Department of Mathematics Princeton UniversityEpic WinNoch keine Bewertungen
- IstDokument34 SeitenIstEpic WinNoch keine Bewertungen
- HopeDokument4 SeitenHopeEpic WinNoch keine Bewertungen
- Edward NelsonDokument1 SeiteEdward NelsonEpic WinNoch keine Bewertungen
- Understanding Intuitionism: WWW - Math.princeton - Edu Nelson Papers - HTMLDokument20 SeitenUnderstanding Intuitionism: WWW - Math.princeton - Edu Nelson Papers - HTMLEpic WinNoch keine Bewertungen
- Internal Set TheoryDokument26 SeitenInternal Set TheoryEpic WinNoch keine Bewertungen
- J. P. MayDokument17 SeitenJ. P. MayEpic WinNoch keine Bewertungen
- Probability Theory: 1 Heuristic IntroductionDokument17 SeitenProbability Theory: 1 Heuristic IntroductionEpic WinNoch keine Bewertungen
- J-Spectra For A Quotient Group J of G. That Context Gives An Interesting SituationDokument9 SeitenJ-Spectra For A Quotient Group J of G. That Context Gives An Interesting SituationEpic WinNoch keine Bewertungen
- RH Control - SeracloneDokument2 SeitenRH Control - Seraclonewendys rodriguez, de los santosNoch keine Bewertungen
- Lesson Plan Earth and Life Science: Exogenic ProcessesDokument2 SeitenLesson Plan Earth and Life Science: Exogenic ProcessesNuevalyn Quijano FernandoNoch keine Bewertungen
- Baby Brianna Andrew WaltersDokument14 SeitenBaby Brianna Andrew WaltersBaby Brianna50% (2)
- LabDokument11 SeitenLableonora KrasniqiNoch keine Bewertungen
- Masterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceDokument17 SeitenMasterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceacinehhjNoch keine Bewertungen
- Episode 5 The Global TeacherDokument8 SeitenEpisode 5 The Global TeacherEllieza Bauto SantosNoch keine Bewertungen
- Mehta 2021Dokument4 SeitenMehta 2021VatokicNoch keine Bewertungen
- Measurement (Ques - Ch2 - Electromechanical Instruments) PDFDokument56 SeitenMeasurement (Ques - Ch2 - Electromechanical Instruments) PDFmadivala nagarajaNoch keine Bewertungen
- Reviewer in Auditing Problems by Reynaldo Ocampo PDFDokument1 SeiteReviewer in Auditing Problems by Reynaldo Ocampo PDFCarlo BalinoNoch keine Bewertungen
- CNS Drugs Pharmaceutical Form Therapeutic Group: 6mg, 8mgDokument7 SeitenCNS Drugs Pharmaceutical Form Therapeutic Group: 6mg, 8mgCha GabrielNoch keine Bewertungen
- 160 LW Bending Tester v2.0Dokument4 Seiten160 LW Bending Tester v2.0Sá StrapassonNoch keine Bewertungen
- Sample Programs in CDokument37 SeitenSample Programs in CNoel JosephNoch keine Bewertungen
- MNLG 4Dokument2 SeitenMNLG 4Kanchana Venkatesh39% (18)
- Literature Review LichenDokument7 SeitenLiterature Review LichenNur Fazrina CGNoch keine Bewertungen
- Reflection SogieDokument11 SeitenReflection SogieCHRISTIAN ALLEN S. LOPENANoch keine Bewertungen
- Weekly Learning Plan: Department of EducationDokument2 SeitenWeekly Learning Plan: Department of EducationJim SulitNoch keine Bewertungen
- FA2Dokument6 SeitenFA2yuktiNoch keine Bewertungen
- Strengthsfinder Sept GBMDokument32 SeitenStrengthsfinder Sept GBMapi-236473176Noch keine Bewertungen
- Thailand Day 2Dokument51 SeitenThailand Day 2Edsel BuletinNoch keine Bewertungen
- Dwnload Full Conceptual Physics 12th Edition Hewitt Test Bank PDFDokument36 SeitenDwnload Full Conceptual Physics 12th Edition Hewitt Test Bank PDFscreamsoaring.pm7hcv100% (13)
- HSE Matrix PlanDokument5 SeitenHSE Matrix Planवात्सल्य कृतार्थ100% (1)
- Automated Long-Distance HADR ConfigurationsDokument73 SeitenAutomated Long-Distance HADR ConfigurationsKan DuNoch keine Bewertungen
- Stephen Law Morality Without GodDokument9 SeitenStephen Law Morality Without GodJiReH MeCuaNoch keine Bewertungen
- Berms For Stablizing Earth Retaining Structures: Youssef Gomaa Youssef Morsi B.SC., Civil EngineeringDokument212 SeitenBerms For Stablizing Earth Retaining Structures: Youssef Gomaa Youssef Morsi B.SC., Civil EngineeringChan KNoch keine Bewertungen
- Gallery IsKCON Desire Tree PDF MudrasDokument2 SeitenGallery IsKCON Desire Tree PDF MudrassanatanNoch keine Bewertungen
- Empirical Formula MgCl2Dokument3 SeitenEmpirical Formula MgCl2yihengcyh100% (1)
- Software Quality Metrics MethodologyDokument17 SeitenSoftware Quality Metrics MethodologySumit RajputNoch keine Bewertungen
- Endogenic Processes (Erosion and Deposition) : Group 3Dokument12 SeitenEndogenic Processes (Erosion and Deposition) : Group 3Ralph Lawrence C. PagaranNoch keine Bewertungen
- A Portrayal of Gender and A Description of Gender Roles in SelectDokument429 SeitenA Portrayal of Gender and A Description of Gender Roles in SelectPtah El100% (1)
- Cambridge English First Fce From 2015 Reading and Use of English Part 7Dokument5 SeitenCambridge English First Fce From 2015 Reading and Use of English Part 7JunanNoch keine Bewertungen
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeVon EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeBewertung: 4 von 5 Sternen4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Von EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Noch keine Bewertungen
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsVon EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsBewertung: 4.5 von 5 Sternen4.5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 5 von 5 Sternen5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Von EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Bewertung: 5 von 5 Sternen5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryVon EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNoch keine Bewertungen
- Calculus Workbook For Dummies with Online PracticeVon EverandCalculus Workbook For Dummies with Online PracticeBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Mental Math Secrets - How To Be a Human CalculatorVon EverandMental Math Secrets - How To Be a Human CalculatorBewertung: 5 von 5 Sternen5/5 (3)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Von EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Noch keine Bewertungen
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingVon EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingBewertung: 4.5 von 5 Sternen4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathVon EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathBewertung: 5 von 5 Sternen5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsVon EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsBewertung: 3.5 von 5 Sternen3.5/5 (9)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldVon EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldBewertung: 3 von 5 Sternen3/5 (80)