Das könnte Ihnen auch gefallen
- 2.0 Graphs of Functions 2Dokument123 Seiten2.0 Graphs of Functions 2juriah binti ibrahimNoch keine Bewertungen
- Mortenson, Michael E. - Mathematics For Computer Graphics Applications PDFDokument368 SeitenMortenson, Michael E. - Mathematics For Computer Graphics Applications PDFAftab Alam100% (1)
- How To Build A Robot SimulationDokument26 SeitenHow To Build A Robot SimulationbriejawiNoch keine Bewertungen
- Bioengineering Analysis of Orthodontic Mechanics PDFDokument491 SeitenBioengineering Analysis of Orthodontic Mechanics PDFElizabeth Diaz Bueno100% (3)
- A Method For Evaluating Spindle Rotation Errors of Machine Tools Using A Laser InterferometerDokument12 SeitenA Method For Evaluating Spindle Rotation Errors of Machine Tools Using A Laser Interferometerganesh03872368Noch keine Bewertungen
- Introduction in CrystallographyDokument68 SeitenIntroduction in Crystallographyyasmeen rafatNoch keine Bewertungen
- Eumach VMC-1100 VERTICAL CNC MACHINING CENTERDokument80 SeitenEumach VMC-1100 VERTICAL CNC MACHINING CENTERLuis OliveiraNoch keine Bewertungen
- Calculus An Introductory ApproachDokument181 SeitenCalculus An Introductory ApproachsergecheshutNoch keine Bewertungen
- Report Wind Tunnel - FinalDokument22 SeitenReport Wind Tunnel - FinalRavi Kant100% (1)
- European Patent Specification: Printed by Jouve, 75001 PARIS (FR)Dokument22 SeitenEuropean Patent Specification: Printed by Jouve, 75001 PARIS (FR)avalosheNoch keine Bewertungen
- TEPZZ 7Z - A T: European Patent ApplicationDokument39 SeitenTEPZZ 7Z - A T: European Patent ApplicationseehariNoch keine Bewertungen
- Us 4274053Dokument23 SeitenUs 4274053Andari Dian AriestianiNoch keine Bewertungen
- US20140133980A1Dokument12 SeitenUS20140133980A1雷黎明Noch keine Bewertungen
- European Patent Specification: Neutral Position Setting Apparatus of Wireless Remote-Control ModelDokument18 SeitenEuropean Patent Specification: Neutral Position Setting Apparatus of Wireless Remote-Control Modeltrtry34Noch keine Bewertungen
- Requirements For An Aerospace Actuation System Derived From The Control Design Point of ViewDokument8 SeitenRequirements For An Aerospace Actuation System Derived From The Control Design Point of ViewKarad KaradiasNoch keine Bewertungen
- United States Patent (191: Swearingen (11) 4,287,758Dokument7 SeitenUnited States Patent (191: Swearingen (11) 4,287,758NicandroGonzalesNoch keine Bewertungen
- Inertial (Motion) Sensor: AccelerometerDokument9 SeitenInertial (Motion) Sensor: AccelerometerAyman Boghdady100% (1)
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0147666 A1Dokument9 SeitenUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0147666 A1Jeong-geun KimNoch keine Bewertungen
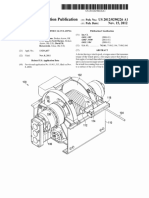
- Us 20130222183Dokument18 SeitenUs 20130222183noneNoch keine Bewertungen
- European Patent Application: Shedding-Pattern Setting Device For LoomDokument13 SeitenEuropean Patent Application: Shedding-Pattern Setting Device For LoomWaqar AhmadNoch keine Bewertungen
- Computer Numerical Control: Engineering Analysis of NC Positioning SystemsDokument30 SeitenComputer Numerical Control: Engineering Analysis of NC Positioning SystemsibraheemNoch keine Bewertungen
- Patents: Strain Gauge Data Reduction Apparatus and MethodsDokument8 SeitenPatents: Strain Gauge Data Reduction Apparatus and MethodsvigneshwarimahamuniNoch keine Bewertungen
- Investigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityDokument7 SeitenInvestigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityShamanth CNoch keine Bewertungen
- European Patent Application: A Radar Side-Shield and A Radar Transceiver AssemblyDokument15 SeitenEuropean Patent Application: A Radar Side-Shield and A Radar Transceiver AssemblyKrishnkant NainwalNoch keine Bewertungen
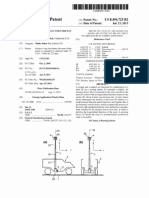
- United States Patent (10) Patent N0.: US 8,494,725 B2Dokument11 SeitenUnited States Patent (10) Patent N0.: US 8,494,725 B2sarkrassNoch keine Bewertungen
- Robotic Arm: Team MembersDokument9 SeitenRobotic Arm: Team MembersShubham KaushikNoch keine Bewertungen
- Proc SPIE - 6304Dokument10 SeitenProc SPIE - 6304norbdudeNoch keine Bewertungen
- High-Resolution of Rotary EncoderDokument5 SeitenHigh-Resolution of Rotary EncoderGoran MiljkovicNoch keine Bewertungen
- The Mcu and Other Components of The NCDokument7 SeitenThe Mcu and Other Components of The NCKavuri PhaniNoch keine Bewertungen
- March 22, 1949.: ' Méd May 2o, Y1947Dokument4 SeitenMarch 22, 1949.: ' Méd May 2o, Y1947Fred JohnsonNoch keine Bewertungen
- United States Patent (19) (11) Patent Number: 5,243,873Dokument10 SeitenUnited States Patent (19) (11) Patent Number: 5,243,873Nile_JockeyNoch keine Bewertungen
- AE4-393: Avionics Exam Solutions 2007-10-29: 1. Communication, Navigation, SurveillanceDokument9 SeitenAE4-393: Avionics Exam Solutions 2007-10-29: 1. Communication, Navigation, SurveillancesathishNoch keine Bewertungen
- Research Article: Numerical Investigation On Pressure Fluctuations For Different Configurations of Vaned Diffuser PumpsDokument10 SeitenResearch Article: Numerical Investigation On Pressure Fluctuations For Different Configurations of Vaned Diffuser Pumpsbakri10101Noch keine Bewertungen
- On Some Pecularities of Paloid Bevel Gear Worm-Hobs: Dénes HOLLANDA, Márton MÁTÉDokument7 SeitenOn Some Pecularities of Paloid Bevel Gear Worm-Hobs: Dénes HOLLANDA, Márton MÁTÉjulio_rodriguesNoch keine Bewertungen
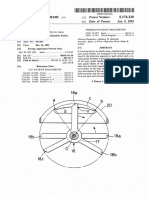
- Us 5176330Dokument7 SeitenUs 5176330ManivannanMudhaliarNoch keine Bewertungen
- AN3461 - Tilt Sensing Using Linear AccelerometersDokument22 SeitenAN3461 - Tilt Sensing Using Linear AccelerometersakallyNoch keine Bewertungen
- SPIE 6422-32 Risley Prisms ToralesDokument8 SeitenSPIE 6422-32 Risley Prisms ToralesnorbdudeNoch keine Bewertungen
- Machine Design For Self-Sensing: Apoorva Athavale, Huthaifa Flieh, Brent S. Gagas, Timothy S. Slininger, Robert D. LorenzDokument10 SeitenMachine Design For Self-Sensing: Apoorva Athavale, Huthaifa Flieh, Brent S. Gagas, Timothy S. Slininger, Robert D. LorenzelsmanNoch keine Bewertungen
- A Self Servo Writing Scheme For A MEMS Storage Device With Sub-Nanometer PrecisionDokument6 SeitenA Self Servo Writing Scheme For A MEMS Storage Device With Sub-Nanometer Precisionvsc2012Noch keine Bewertungen
- Vertical Diamond Turning - NambaDokument7 SeitenVertical Diamond Turning - Nambakndprasad01Noch keine Bewertungen
- TEPZZZ89Z4 - 4B - T: European Patent SpecificationDokument25 SeitenTEPZZZ89Z4 - 4B - T: European Patent Specificationzweisteine777Noch keine Bewertungen
- C. C. Cutler Attitude Control For Satellite Vehicles 2 Sheets-Shut 1Dokument5 SeitenC. C. Cutler Attitude Control For Satellite Vehicles 2 Sheets-Shut 1david19775891Noch keine Bewertungen
- Unified Patents D3d Technologies US10795457Dokument9 SeitenUnified Patents D3d Technologies US10795457Jennifer M GallagherNoch keine Bewertungen
- P 2 DDokument2 SeitenP 2 Dnayyer.sayedshadabNoch keine Bewertungen
- MCI FeedbSensorDokument6 SeitenMCI FeedbSensoravi_ca22Noch keine Bewertungen
- Em Propagation in Jet Engine TurbinesDokument4 SeitenEm Propagation in Jet Engine TurbinesAlphi DonaldNoch keine Bewertungen
- PDF - Google Invents VR Controller With VR ARM Model For More Than 3 Degrees of Movement - A Patently Mobile IP Report SupplementDokument25 SeitenPDF - Google Invents VR Controller With VR ARM Model For More Than 3 Degrees of Movement - A Patently Mobile IP Report SupplementJack PurcherNoch keine Bewertungen
- European Patent Application: Over-Unity Energy Motor - GeneratorDokument18 SeitenEuropean Patent Application: Over-Unity Energy Motor - GeneratoravalosheNoch keine Bewertungen
- Directivity ModelingDokument12 SeitenDirectivity ModelingAbdeslam NassiriNoch keine Bewertungen
- Indian StandardDokument28 SeitenIndian StandardskidamdnevnoNoch keine Bewertungen
- United States Patent (191Dokument17 SeitenUnited States Patent (191Soma GhoshNoch keine Bewertungen
- The Internal Flow Investigation of A Centrifugal PumpDokument8 SeitenThe Internal Flow Investigation of A Centrifugal Pumppreetham108Noch keine Bewertungen
- Optical Sensors For Multi-Axis Angle andDokument33 SeitenOptical Sensors For Multi-Axis Angle andAnant PatilNoch keine Bewertungen
- JSM 3 1 2010Dokument8 SeitenJSM 3 1 2010ganesh0387Noch keine Bewertungen
- United States Patent (19) : Primary Examiner-Samuel ScottDokument7 SeitenUnited States Patent (19) : Primary Examiner-Samuel ScottRockerss RockerssNoch keine Bewertungen
- Dynamic Wake1Dokument12 SeitenDynamic Wake1Abdulqadir Aziz Singapore WalaNoch keine Bewertungen
- Use of A Laser Tracker To Actively Coordinate The Motion of A 3 Meter Industrial Robot To Within 50 MicronsDokument7 SeitenUse of A Laser Tracker To Actively Coordinate The Motion of A 3 Meter Industrial Robot To Within 50 MicronsClenaNoch keine Bewertungen
- Convention Paper 5653Dokument29 SeitenConvention Paper 5653Simon TempleNoch keine Bewertungen
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDokument8 SeitenDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Design and Fabrication of Time Delay Conveyor Using Geneva MechanismDokument40 SeitenDesign and Fabrication of Time Delay Conveyor Using Geneva MechanismRamachantran RamachantranNoch keine Bewertungen
- Diagrama Electrico de ControlDokument7 SeitenDiagrama Electrico de ControlemernelsonmanNoch keine Bewertungen
- Low Cost AhrsDokument20 SeitenLow Cost AhrsAndrewNoch keine Bewertungen
- Estimating Unbalance and Misalignment of A Exible Rotating Machine From A Single Run-DownDokument23 SeitenEstimating Unbalance and Misalignment of A Exible Rotating Machine From A Single Run-DownDinuJoseNoch keine Bewertungen
- Winch Force AnalyzeDokument10 SeitenWinch Force AnalyzeKhắc Thành Nguyễn NgọcNoch keine Bewertungen
- Cavallo 2014Dokument7 SeitenCavallo 2014Trần Hoàng LâmNoch keine Bewertungen
- GEO3701 Unit 2Dokument59 SeitenGEO3701 Unit 2Asithandile Punqunqu MpayipheliNoch keine Bewertungen
- Engineering Mechanics: CentriodsDokument26 SeitenEngineering Mechanics: CentriodsAbdul WahabNoch keine Bewertungen
- Usr GuideDokument37 SeitenUsr GuidecimasukNoch keine Bewertungen
- Presentation Math Coordinate GeometryDokument71 SeitenPresentation Math Coordinate Geometryonemastura209380% (5)
- CFDDokument431 SeitenCFD9700216256Noch keine Bewertungen
- Control HNC MANUAL DE PROGRAMACIONDokument144 SeitenControl HNC MANUAL DE PROGRAMACIONSaul Fernando Cujaban AceroNoch keine Bewertungen
- Pearson Edexcel Level 1/level 2 GCSE (9 - 1) in Mathematics (1MA1)Dokument27 SeitenPearson Edexcel Level 1/level 2 GCSE (9 - 1) in Mathematics (1MA1)hannah hussainNoch keine Bewertungen
- CS602 Midterm Objective (MCQ'Z) Solved With Reference: by Well Wisher (Aqua Leo)Dokument12 SeitenCS602 Midterm Objective (MCQ'Z) Solved With Reference: by Well Wisher (Aqua Leo)blanooba231Noch keine Bewertungen
- Mathematical Conventions: For The Quantitative Reasoning Measure of The GRE Revised General TestDokument11 SeitenMathematical Conventions: For The Quantitative Reasoning Measure of The GRE Revised General Testjournalist.tariqNoch keine Bewertungen
- Basic TransformationDokument10 SeitenBasic TransformationsamNoch keine Bewertungen
- Us6061865 PDFDokument8 SeitenUs6061865 PDFmohamed alsalhyNoch keine Bewertungen
- 4024 w04 QP 2Dokument12 Seiten4024 w04 QP 2mstudy123456Noch keine Bewertungen
- Mold Wizard, UnigraphicsDokument55 SeitenMold Wizard, Unigraphicsrankx00175% (4)
- Examining JRPG UIDokument13 SeitenExamining JRPG UILucas Pessota0% (1)
- Washout Filter For A 3 DOF SimulatorDokument6 SeitenWashout Filter For A 3 DOF SimulatornnutkumhangNoch keine Bewertungen
- SprutCAM 4Dokument150 SeitenSprutCAM 4Galletti DenisNoch keine Bewertungen
- Using WCS and The View ManagerDokument28 SeitenUsing WCS and The View Managermadmaxx42Noch keine Bewertungen
- Sojour ManualDokument142 SeitenSojour ManualJon KrusinskiNoch keine Bewertungen
- Chap. 1: Vertical PhotographsDokument22 SeitenChap. 1: Vertical PhotographsLarasaty Ayu0% (1)
- Computer Graphics Lab Manual For IV CSEDokument67 SeitenComputer Graphics Lab Manual For IV CSEGopal RamNoch keine Bewertungen
- Chapter 12 II Transformations III SPM Past Year Questions 2Dokument8 SeitenChapter 12 II Transformations III SPM Past Year Questions 2Samsiah Mustaffa100% (1)
- Autodyn Composite Modeling GuideDokument74 SeitenAutodyn Composite Modeling Guidejoesph killerNoch keine Bewertungen
- The Denavit-Hartenberg RepresentationDokument2 SeitenThe Denavit-Hartenberg RepresentationEric PierceNoch keine Bewertungen