Das könnte Ihnen auch gefallen
- Software Radio: Sampling Rate Selection, Design and SynchronizationVon EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNoch keine Bewertungen
- ICI Mitigation For Pilot-Aided OFDM Mobile SystemsDokument10 SeitenICI Mitigation For Pilot-Aided OFDM Mobile SystemsnorlyemiliaNoch keine Bewertungen
- Performance Analysis of Phase Noise Impaired Ofdm Systeminamultipath Fading ChannelDokument6 SeitenPerformance Analysis of Phase Noise Impaired Ofdm Systeminamultipath Fading Channeljagadeesh jagadeNoch keine Bewertungen
- 5990 5446enDokument18 Seiten5990 5446enBurgheaua Mihai AlexandruNoch keine Bewertungen
- On Using Transmission Overhead Efficiently For Channel Estimation in OFDMDokument6 SeitenOn Using Transmission Overhead Efficiently For Channel Estimation in OFDMAnonymous uspYoqENoch keine Bewertungen
- Adaptive Filter Bank Modulation For Next Generation Wireless In-Home NetworksDokument12 SeitenAdaptive Filter Bank Modulation For Next Generation Wireless In-Home Networkssindhur6938Noch keine Bewertungen
- Real-Time DSP Implementation of Audio Crosstalk Cancellation Using Mixed Uniform Partitioned ConvolutionDokument10 SeitenReal-Time DSP Implementation of Audio Crosstalk Cancellation Using Mixed Uniform Partitioned ConvolutionAI Coordinator - CSC JournalsNoch keine Bewertungen
- Orthogonal Frequency-Division MultiplexingDokument37 SeitenOrthogonal Frequency-Division MultiplexingCheick Sidi Mohamed SakhoNoch keine Bewertungen
- ECS455 - 5 - 1 - OFDM U1Dokument27 SeitenECS455 - 5 - 1 - OFDM U1prapunNoch keine Bewertungen
- B. P. Lathi, Zhi Ding - Modern Digital and Analog Communication Systems-Oxford University Press (2009)Dokument4 SeitenB. P. Lathi, Zhi Ding - Modern Digital and Analog Communication Systems-Oxford University Press (2009)Samama ZafarNoch keine Bewertungen
- AIM Objective: Digital Communication Simulation Using MatlabDokument18 SeitenAIM Objective: Digital Communication Simulation Using Matlabhari423Noch keine Bewertungen
- Mathematical Description of OFDMDokument8 SeitenMathematical Description of OFDMthegioiphang_1604Noch keine Bewertungen
- Syrjala Phase Noise Modelling and MitigationDokument7 SeitenSyrjala Phase Noise Modelling and Mitigationمصطفى محمد عيد سلامةNoch keine Bewertungen
- Channel Estimation For Adaptive Frequency-Domain EqualizationDokument11 SeitenChannel Estimation For Adaptive Frequency-Domain Equalizationअमरेश झाNoch keine Bewertungen
- Analysis of Wavelet Based OFDM SystemDokument8 SeitenAnalysis of Wavelet Based OFDM Systemhk_sonuNoch keine Bewertungen
- 6-Frequency Translation HandoutDokument4 Seiten6-Frequency Translation Handoutshazmina 44Noch keine Bewertungen
- Multicarrier Communications: Introduction and OFDM BasicsDokument43 SeitenMulticarrier Communications: Introduction and OFDM BasicsscribphxNoch keine Bewertungen
- 1978 - Passband Timing Recovery in An All-Digital Modem ReceiverDokument7 Seiten1978 - Passband Timing Recovery in An All-Digital Modem ReceiverqasimilyasscribdNoch keine Bewertungen
- Frequency Domain EqualizerDokument5 SeitenFrequency Domain EqualizerANDRETERROMNoch keine Bewertungen
- Channel Equalization Techniques For Wireless Communications SystemsDokument42 SeitenChannel Equalization Techniques For Wireless Communications SystemsLove IsNoch keine Bewertungen
- Analog To Digital ConversionDokument11 SeitenAnalog To Digital Conversionsaurabh2078Noch keine Bewertungen
- 5 - Evaluation of Communication Distance of Broadcast Messages in A Vehicular Ad-Hoc Network Using IEEE 802.11pDokument4 Seiten5 - Evaluation of Communication Distance of Broadcast Messages in A Vehicular Ad-Hoc Network Using IEEE 802.11pAchraf BouraNoch keine Bewertungen
- Application of DFT Filter Bank To Power Frequency Harmonic MeasurementDokument5 SeitenApplication of DFT Filter Bank To Power Frequency Harmonic Measurementfranchisca9999Noch keine Bewertungen
- Kilavo ADokument6 SeitenKilavo AJoakim NgatungaNoch keine Bewertungen
- DMT-based Power Line Communication For The CENELEC A-BandDokument8 SeitenDMT-based Power Line Communication For The CENELEC A-Bandu235861Noch keine Bewertungen
- InTech-Fractional Delay Digital FiltersDokument27 SeitenInTech-Fractional Delay Digital FiltersSidharth MahotraNoch keine Bewertungen
- Removal of DCDokument7 SeitenRemoval of DCsirisiri100Noch keine Bewertungen
- Low-Latency Convolution For Real-Time ApplicationDokument7 SeitenLow-Latency Convolution For Real-Time ApplicationotringalNoch keine Bewertungen
- Hardware Architecture and Laboratory Test On An Advanced Cd3-Dvb-T ReceiverDokument5 SeitenHardware Architecture and Laboratory Test On An Advanced Cd3-Dvb-T ReceiverStarLink1Noch keine Bewertungen
- A Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCDokument5 SeitenA Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCAmbika Prasad ChandaNoch keine Bewertungen
- What Is OFDMDokument4 SeitenWhat Is OFDMmaheshbabuhereNoch keine Bewertungen
- 63-No.4-2008 - 04-Svilainis, MotiejunasDokument5 Seiten63-No.4-2008 - 04-Svilainis, MotiejunasriannataNoch keine Bewertungen
- Reduced Complexity Decision Feedback Equalizer For Supporting High Mobility in WimaxDokument5 SeitenReduced Complexity Decision Feedback Equalizer For Supporting High Mobility in Wimaxjoy0302Noch keine Bewertungen
- Juhan Nam Vesa VälimäkiDokument6 SeitenJuhan Nam Vesa VälimäkiHerman HesseNoch keine Bewertungen
- Introduction To Ofdm: Nayan SenDokument19 SeitenIntroduction To Ofdm: Nayan SenNayan SenNoch keine Bewertungen
- EE430 Digital Signal Processing Project DescriptionDokument3 SeitenEE430 Digital Signal Processing Project DescriptionGörkem PolatNoch keine Bewertungen
- Simulation of The Aeronautical Radio Channel For Telemetry ApplicationsDokument10 SeitenSimulation of The Aeronautical Radio Channel For Telemetry ApplicationsgoliatcarroNoch keine Bewertungen
- Real Time Implementation of OFDM System On DSP ProcessorDokument8 SeitenReal Time Implementation of OFDM System On DSP ProcessorFaroukSatNoch keine Bewertungen
- A Self-Steering Digital Microphone Array: At&T NJ, UsaDokument4 SeitenA Self-Steering Digital Microphone Array: At&T NJ, UsaMayssa RjaibiaNoch keine Bewertungen
- Ofdm Simulink ModelDokument57 SeitenOfdm Simulink ModelPankaj Pandey50% (2)
- Performance Analysis of OFDM For 4G Wireless Systems Under Various Fading ChannelsDokument4 SeitenPerformance Analysis of OFDM For 4G Wireless Systems Under Various Fading ChannelsJuan Dela CruzNoch keine Bewertungen
- ADC QB SolutionsDokument15 SeitenADC QB Solutionssandeep kumar yadavNoch keine Bewertungen
- ReportDokument5 SeitenReportChokkarapu Anil100% (1)
- Adaptive Equalization AlgorithmsDokument8 SeitenAdaptive Equalization AlgorithmsAnkan RoyBardhan100% (1)
- Boll79 SuppressionAcousticNoiseSpectralSubtraction PDFDokument8 SeitenBoll79 SuppressionAcousticNoiseSpectralSubtraction PDFNguyễn Trí PhướcNoch keine Bewertungen
- A Set-Up For Measurement of Low Frequency Conductance Fluctuation (Noise) Using Digital Signal Processing TechniquesDokument25 SeitenA Set-Up For Measurement of Low Frequency Conductance Fluctuation (Noise) Using Digital Signal Processing TechniquesDivya Kumar SharmaNoch keine Bewertungen
- Performance Evaluation of A 3GPP LTE Terminal Receiver: Konstantinos Manolakis, Andreas Ibing, Volker JungnickelDokument5 SeitenPerformance Evaluation of A 3GPP LTE Terminal Receiver: Konstantinos Manolakis, Andreas Ibing, Volker Jungnickelhanochk12Noch keine Bewertungen
- Chapter 4Dokument10 SeitenChapter 4Manwinder Singh GillNoch keine Bewertungen
- UBvhinostroza 128Dokument8 SeitenUBvhinostroza 128Ubiquitous Computing and Communication JournalNoch keine Bewertungen
- Comparative Analysis of Wavelet Based Constant Envelope OFDM and Constant Envelope OFDM Using Phase ModulationDokument5 SeitenComparative Analysis of Wavelet Based Constant Envelope OFDM and Constant Envelope OFDM Using Phase ModulationIjemls IjemlsNoch keine Bewertungen
- Digital Filter Design For Audio Processing: Ethan Elenberg Anthony Hsu Marc L'HeureuxDokument31 SeitenDigital Filter Design For Audio Processing: Ethan Elenberg Anthony Hsu Marc L'HeureuxvmacariNoch keine Bewertungen
- 32 2 LehtonenDokument14 Seiten32 2 LehtonenΜέμνων ΜπερδεμένοςNoch keine Bewertungen
- CH18Dokument8 SeitenCH18Epic WinNoch keine Bewertungen
- OFDM and FBMC Transmission Techniques - A Bile High Performance Proposal For Broadband Power Line Communications - BelangerDokument6 SeitenOFDM and FBMC Transmission Techniques - A Bile High Performance Proposal For Broadband Power Line Communications - Belangernedics824Noch keine Bewertungen
- 1202 1552 PDFDokument16 Seiten1202 1552 PDFarpitmatlabNoch keine Bewertungen
- A Constrained Maximum-SINR NBI-Resistant PDFDokument16 SeitenA Constrained Maximum-SINR NBI-Resistant PDFSarsij MishraNoch keine Bewertungen
- Study On Equalizers: Anik Sengupta Sohom DasDokument11 SeitenStudy On Equalizers: Anik Sengupta Sohom DasAnikSenguptaNoch keine Bewertungen
- Filter Bank: Insights into Computer Vision's Filter Bank TechniquesVon EverandFilter Bank: Insights into Computer Vision's Filter Bank TechniquesNoch keine Bewertungen
- Digital Communications: Courses and Exercises with SolutionsVon EverandDigital Communications: Courses and Exercises with SolutionsBewertung: 3 von 5 Sternen3/5 (2)
- AdaniDokument2 SeitenAdaniathinabebaNoch keine Bewertungen
- Ac-Aud 3Dokument10 SeitenAc-Aud 3Mark Anthony TibuleNoch keine Bewertungen
- 92.railway Track Pedestrain Crossing Without Using StaircaseDokument3 Seiten92.railway Track Pedestrain Crossing Without Using StaircaseMaragoni MukeshNoch keine Bewertungen
- Cross System Create Supplier ProcessDokument14 SeitenCross System Create Supplier ProcesssakthiroboticNoch keine Bewertungen
- Pa0043 Sub Conor O'donnell PDFDokument7 SeitenPa0043 Sub Conor O'donnell PDFTheNewChildrensHospitalNoch keine Bewertungen
- OBJECTIVES RationaleDokument1 SeiteOBJECTIVES RationaleKylah Joy BautistaNoch keine Bewertungen
- UM HDL Buspro Setup Tool 2 (2020!05!23)Dokument32 SeitenUM HDL Buspro Setup Tool 2 (2020!05!23)crisma tariNoch keine Bewertungen
- Extra PolarDokument4 SeitenExtra Polarraimari brachoNoch keine Bewertungen
- Kiln Shell Laser ManualDokument19 SeitenKiln Shell Laser Manualบิ๊ก บิ๊กNoch keine Bewertungen
- HsDokument97 SeitenHspihkkNoch keine Bewertungen
- Energy Efficient BuildingDokument11 SeitenEnergy Efficient BuildingSantosh Basnet100% (2)
- Electromagnetic Compatibility PDFDokument10 SeitenElectromagnetic Compatibility PDFRedouane NaceriNoch keine Bewertungen
- Demantra SOP EBS Integration Process v1.0Dokument20 SeitenDemantra SOP EBS Integration Process v1.0kmurali321100% (1)
- Government Approved Workshop Gazette NotificationDokument9 SeitenGovernment Approved Workshop Gazette NotificationadheesNoch keine Bewertungen
- جدول كميات كهرباDokument3 Seitenجدول كميات كهرباhany mohamed100% (1)
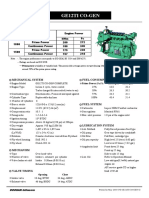
- Ge12ti Co Gen-GDokument2 SeitenGe12ti Co Gen-GTilok DasNoch keine Bewertungen
- The COBIT 5 Processes Are Split Into Governance and ManagementDokument8 SeitenThe COBIT 5 Processes Are Split Into Governance and ManagementdevmasterNoch keine Bewertungen
- Construction Process and Project ManagementDokument2 SeitenConstruction Process and Project ManagementPenyair SufiNoch keine Bewertungen
- Iso 10245-2-2014 PDFDokument16 SeitenIso 10245-2-2014 PDFalejandroNoch keine Bewertungen
- DS01071 XNX Universal Transmitter FLR 8-3-11Dokument4 SeitenDS01071 XNX Universal Transmitter FLR 8-3-11itskittylimNoch keine Bewertungen
- Process Selection and Facility LayoutDokument59 SeitenProcess Selection and Facility LayoutKhietNoch keine Bewertungen
- Signal and Telecommunication Workshop-2Dokument13 SeitenSignal and Telecommunication Workshop-2Sarath Kumar100% (1)
- DFSSDokument4 SeitenDFSSankitrathod87Noch keine Bewertungen
- Mathsoft Group 1 BBMDokument7 SeitenMathsoft Group 1 BBMBrandon DeanNoch keine Bewertungen
- Smart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDokument28 SeitenSmart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDivya AdusumalliNoch keine Bewertungen
- GIS SPDSS FinalDokument11 SeitenGIS SPDSS FinalsrverngpNoch keine Bewertungen
- QRadar SOAR PoX Product Education Quiz (SOAR PoX L4) Attempt ReviewDokument15 SeitenQRadar SOAR PoX Product Education Quiz (SOAR PoX L4) Attempt ReviewLyu SeyNoch keine Bewertungen
- Four Quadrant DC Motor Control Without MicrocontrollerDokument7 SeitenFour Quadrant DC Motor Control Without MicrocontrollerNikhil Kumar Agrawal86% (7)
- Control Equipment Limited Precept Output Expansion Module Installation & Commissioning ManualDokument23 SeitenControl Equipment Limited Precept Output Expansion Module Installation & Commissioning Manualnegro morocoNoch keine Bewertungen
- Saxby KatalogDokument163 SeitenSaxby KatalogjaNoch keine Bewertungen