Das könnte Ihnen auch gefallen
- Engineering Mechanics 1Dokument109 SeitenEngineering Mechanics 1Adnan KhanNoch keine Bewertungen
- Engineering Mechanics NotesDokument100 SeitenEngineering Mechanics NotesRagothsingh Ramadoss67% (3)
- Final Unit-1A (EME-151,152)Dokument17 SeitenFinal Unit-1A (EME-151,152)guptakrish330Noch keine Bewertungen
- Statics FundamentalsDokument23 SeitenStatics FundamentalsArexcin Ray C. TimbalNoch keine Bewertungen
- 1 IntroductionDokument19 Seiten1 Introductionmsi appleNoch keine Bewertungen
- Statics of Rigid BodiesDokument14 SeitenStatics of Rigid BodiesMariya MariyaNoch keine Bewertungen
- Prepared By: Engr. Lucia V. Ortega 8/28/20 Statics of Rigid BodiesDokument11 SeitenPrepared By: Engr. Lucia V. Ortega 8/28/20 Statics of Rigid BodiesJoren JamesNoch keine Bewertungen
- Basic Concepts of Engineering MechanicsDokument19 SeitenBasic Concepts of Engineering MechanicsayingbaNoch keine Bewertungen
- Applied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreDokument82 SeitenApplied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreUmer RazaqNoch keine Bewertungen
- Mechanics PortionDokument6 SeitenMechanics PortionRupak MandalNoch keine Bewertungen
- AttachmentDokument20 SeitenAttachmentyohannisyohannis54Noch keine Bewertungen
- New Module 1 MechanicsDokument23 SeitenNew Module 1 MechanicsGARAY, EUGENIONoch keine Bewertungen
- EEE - 2105 - L1 To 2Dokument20 SeitenEEE - 2105 - L1 To 2KISAKYE MOSESNoch keine Bewertungen
- Fundamentals of Engineering MechanicsDokument19 SeitenFundamentals of Engineering MechanicsayingbaNoch keine Bewertungen
- Overviews of StaticsDokument70 SeitenOverviews of StaticsJacous WcyNoch keine Bewertungen
- MODULE 3. Kinetics of ParticlesDokument40 SeitenMODULE 3. Kinetics of ParticlesAron H OcampoNoch keine Bewertungen
- نموذج1Dokument11 Seitenنموذج1kikk59967Noch keine Bewertungen
- Engg-Mechanics IntroductionDokument79 SeitenEngg-Mechanics IntroductionDr. Pankaj KumarNoch keine Bewertungen
- 01 Mech - Introduction To Engineering MechanicsDokument13 Seiten01 Mech - Introduction To Engineering MechanicsCamille JarlosNoch keine Bewertungen
- Engineering Mechanics PDFDokument78 SeitenEngineering Mechanics PDFSanthosh Mahesh100% (1)
- LECTURE Statics of Rigid BodiesDokument22 SeitenLECTURE Statics of Rigid BodiesRey Ar OrionNoch keine Bewertungen
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDokument19 SeitenEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNoch keine Bewertungen
- Engineering MechanicsDokument100 SeitenEngineering MechanicsShahzeb Karamat100% (2)
- Engineering Mechanics NotesDokument162 SeitenEngineering Mechanics NotesvsanthanamNoch keine Bewertungen
- Engineering MechanicsDokument6 SeitenEngineering MechanicsShackled AstraNoch keine Bewertungen
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDokument19 SeitenEngineering Statics: Quaid-e-Azam College of Engineering & TechnologyaliNoch keine Bewertungen
- Numerical SDokument82 SeitenNumerical Smuhammad adilNoch keine Bewertungen
- 01 - Fundamental ConceptDokument9 Seiten01 - Fundamental ConceptMehul MunshiNoch keine Bewertungen
- Module-1 - BASIC PRINCIPLES-Introduction To Statics - Print Version PDFDokument12 SeitenModule-1 - BASIC PRINCIPLES-Introduction To Statics - Print Version PDFSyh TfkNoch keine Bewertungen
- 1 StressDokument34 Seiten1 StressJuan DavidNoch keine Bewertungen
- Module 1 Introduction To StaticsDokument9 SeitenModule 1 Introduction To StaticsJamjam JoveroNoch keine Bewertungen
- Module 1 - Fundamental Concepts in MechanicsDokument9 SeitenModule 1 - Fundamental Concepts in MechanicsErika Mae SanchezNoch keine Bewertungen
- Lecture 1 Statics. Basic Concepts and AxiomsDokument38 SeitenLecture 1 Statics. Basic Concepts and AxiomsДана Қарасайқызы100% (1)
- Engineering Mechanics: Statics Lecture 1 PDFDokument16 SeitenEngineering Mechanics: Statics Lecture 1 PDFKhalid YousafNoch keine Bewertungen
- Unesco - Eolss Sample Chapters: Mechanics: Statics and DynamicsDokument9 SeitenUnesco - Eolss Sample Chapters: Mechanics: Statics and DynamicsMatevlog SergioNoch keine Bewertungen
- EEE - 2105 - L1 To 3 - UploadDokument78 SeitenEEE - 2105 - L1 To 3 - UploadKISAKYE MOSESNoch keine Bewertungen
- Engineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringDokument18 SeitenEngineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringAli aliraqiNoch keine Bewertungen
- Engineering Mechanics I (Stat) Handout-1-14Dokument14 SeitenEngineering Mechanics I (Stat) Handout-1-14Hamlity SaintataNoch keine Bewertungen
- Chapter One Hand OutDokument2 SeitenChapter One Hand OutFootkball 1Noch keine Bewertungen
- Unit-1&2 Engineering MechanicsDokument15 SeitenUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanNoch keine Bewertungen
- Engineering Mechanics ENGG 205: Recommended Book: R.C HibbelerDokument7 SeitenEngineering Mechanics ENGG 205: Recommended Book: R.C HibbelerFaisal KhanNoch keine Bewertungen
- 3RD Year Es1 NotesDokument9 Seiten3RD Year Es1 NotesMiguel MarcoNoch keine Bewertungen
- Engineering Mechanics Statics: Dams &water Resources Department First Stage - 2 Semester 2017 - 201 8Dokument12 SeitenEngineering Mechanics Statics: Dams &water Resources Department First Stage - 2 Semester 2017 - 201 8luay adnanNoch keine Bewertungen
- Module 2 Kinetics of A Particle-Force and AccelerationDokument72 SeitenModule 2 Kinetics of A Particle-Force and AccelerationHuy VũNoch keine Bewertungen
- Module 1 - Fundamental Concepts in Mechanics PDFDokument9 SeitenModule 1 - Fundamental Concepts in Mechanics PDFRome Erwin Manalo FestinNoch keine Bewertungen
- Statics of Rigid BodiesDokument91 SeitenStatics of Rigid Bodies20-08702Noch keine Bewertungen
- Trusses 72 85Dokument91 SeitenTrusses 72 85Carlorel AnteNoch keine Bewertungen
- 1.dynamics 7.newton's Law of Universal GravitationDokument3 Seiten1.dynamics 7.newton's Law of Universal GravitationnoelNoch keine Bewertungen
- Chap 1 General Principles of StaticsDokument52 SeitenChap 1 General Principles of StaticsHassan ArshadNoch keine Bewertungen
- Engineering Mechanics For Civil Engr.Dokument112 SeitenEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Von EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Noch keine Bewertungen
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsVon EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNoch keine Bewertungen
- Power, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksVon EverandPower, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksNoch keine Bewertungen
- Scientech 2201 2202 NewDokument95 SeitenScientech 2201 2202 Newshreyas reddyNoch keine Bewertungen
- Wa0008.Dokument8 SeitenWa0008.syeddanishali43210% (1)
- .A Model For Collection and Establishment of Firing Order For Balancing of V6 EngineDokument7 Seiten.A Model For Collection and Establishment of Firing Order For Balancing of V6 EnginekandukissNoch keine Bewertungen
- Nanofiltration As A Pretreatment Step in Seawater Desalination: A ReviewDokument52 SeitenNanofiltration As A Pretreatment Step in Seawater Desalination: A ReviewRaul RebolledoNoch keine Bewertungen
- Question and Solution of RMO (2023)Dokument6 SeitenQuestion and Solution of RMO (2023)Fire Blaze PlaysNoch keine Bewertungen
- SVP2020 01 214 00199 PDFDokument7 SeitenSVP2020 01 214 00199 PDFVikash KotteeswaranNoch keine Bewertungen
- Lectrocount : Standard Bulk Truck System Standard Bulk Truck System Installation Procedures Installation ProceduresDokument44 SeitenLectrocount : Standard Bulk Truck System Standard Bulk Truck System Installation Procedures Installation ProceduresPhilip HoferNoch keine Bewertungen
- The Physics of MusicDokument13 SeitenThe Physics of MusicKavithira DevarajanNoch keine Bewertungen
- WME01 01 Que 20200305Dokument24 SeitenWME01 01 Que 20200305Ahmad BatranNoch keine Bewertungen
- Broadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USADokument3 SeitenBroadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USAAstro MikeNoch keine Bewertungen
- Comparativo Cutmaster 82 Vs LincolnDokument1 SeiteComparativo Cutmaster 82 Vs LincolncarlosNoch keine Bewertungen
- Assignment 1 - Stress StrainDokument1 SeiteAssignment 1 - Stress StrainZain Tahir0% (2)
- Chapter 4 NEPHAR 201 - Analytical Chemistry II - Atomic Absorption and Emission Spectrometry - 13Dokument40 SeitenChapter 4 NEPHAR 201 - Analytical Chemistry II - Atomic Absorption and Emission Spectrometry - 13Negasso JiraNoch keine Bewertungen
- WEG Severe Duty Is Standard With W22 Motors USAW22SEVDUTY.7.2017 Brochure English WebDokument16 SeitenWEG Severe Duty Is Standard With W22 Motors USAW22SEVDUTY.7.2017 Brochure English WebPAULO SOUZANoch keine Bewertungen
- S10 - Q2 - Summative Test 1Dokument5 SeitenS10 - Q2 - Summative Test 1Letsirk Saluta Ramos100% (1)
- 0460 443 301 GB (Caddy TIG 2200i - Manual 2019)Dokument28 Seiten0460 443 301 GB (Caddy TIG 2200i - Manual 2019)maverick kitaroNoch keine Bewertungen
- Ch2 Aircraft LoadsDokument24 SeitenCh2 Aircraft LoadsDragon ZNNoch keine Bewertungen
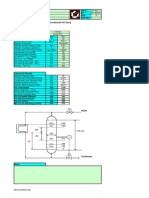
- Steam Condensate Pot SizingDokument1 SeiteSteam Condensate Pot SizingSaeid Rahimi Mofrad100% (1)
- 2022 Ial Phy Y13 HW 07Dokument4 Seiten2022 Ial Phy Y13 HW 07Bruno BauerNoch keine Bewertungen
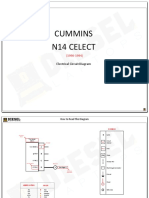
- Cummins N14 Celect: Electrical Circuit DiagramDokument9 SeitenCummins N14 Celect: Electrical Circuit DiagramDiego Lira100% (1)
- CH 6-CH2003 - BkelDokument17 SeitenCH 6-CH2003 - BkelPHONG LÊ TẤNNoch keine Bewertungen
- Mechanical Product Handbook 15th EditionDokument606 SeitenMechanical Product Handbook 15th EditionEsteban GNoch keine Bewertungen
- KNR 3522: Electrical Lab 2 Laboratory Manual: Synchronizing GeneratorsDokument7 SeitenKNR 3522: Electrical Lab 2 Laboratory Manual: Synchronizing GeneratorsMarceila SuzieNoch keine Bewertungen
- Satellite TerminologyDokument15 SeitenSatellite TerminologyARTMehr Eng. GroupNoch keine Bewertungen
- Difference Between MCB, MCCB, RCCB, ELCBDokument3 SeitenDifference Between MCB, MCCB, RCCB, ELCBJaved HasanNoch keine Bewertungen
- Moores Law ForeverDokument3 SeitenMoores Law ForeverCésar UribeNoch keine Bewertungen
- Assessment 3 API 570Dokument12 SeitenAssessment 3 API 570Mohamed ZainNoch keine Bewertungen
- Solution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHDokument62 SeitenSolution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHJohn A. CenizaNoch keine Bewertungen
- Electric Potential Energy & Electric PotentialDokument17 SeitenElectric Potential Energy & Electric Potentialblismae genotivaNoch keine Bewertungen
- Liquid CrystalDokument44 SeitenLiquid Crystalshreeji2017Noch keine Bewertungen