Das könnte Ihnen auch gefallen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- Proposal Setting Gi Tanjung BungaDokument20 SeitenProposal Setting Gi Tanjung Bungawandy RJ100% (1)
- ProtectionDokument157 SeitenProtectionsivaepeNoch keine Bewertungen
- Busbar Basic (Refresher) +relays SelectionDokument20 SeitenBusbar Basic (Refresher) +relays SelectionJawi KuswantoNoch keine Bewertungen
- High Voltage Busbar ProtectionDokument45 SeitenHigh Voltage Busbar ProtectionabhinavksauravNoch keine Bewertungen
- Micom P746: Numerical Busbar ProtectionDokument8 SeitenMicom P746: Numerical Busbar Protectionsridhar30481647100% (1)
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDokument41 SeitenCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahNoch keine Bewertungen
- Continuous Development Policy GuideDokument7 SeitenContinuous Development Policy GuideMaylen Barrios PeñaNoch keine Bewertungen
- A Comprehensive Guide To Voltage Transformer VT Circuit Supervision TechniquesDokument24 SeitenA Comprehensive Guide To Voltage Transformer VT Circuit Supervision Techniquesorgil.snoopyNoch keine Bewertungen
- Distance Protection SchemeDokument8 SeitenDistance Protection Schemesajjad ramezanzadehNoch keine Bewertungen
- 1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetDokument14 Seiten1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetFredrikNoch keine Bewertungen
- Stub Bus PDFDokument1 SeiteStub Bus PDFpgcilNoch keine Bewertungen
- Line Differential Relay 7SD52Dokument17 SeitenLine Differential Relay 7SD52Anonymous 9VcxlFErfNoch keine Bewertungen
- Basics of The RET-670:: Ret-670 Relay Calculation ProcedureDokument9 SeitenBasics of The RET-670:: Ret-670 Relay Calculation ProcedurevenkateshbitraNoch keine Bewertungen
- 7sd52 7sd62 ConfigurationDokument14 Seiten7sd52 7sd62 ConfigurationWilber LucasNoch keine Bewertungen
- p345 Technical ManualDokument1 Seitep345 Technical ManualabhayambujNoch keine Bewertungen
- Setting Sheet of 7UM622 For 25MW GPRDokument16 SeitenSetting Sheet of 7UM622 For 25MW GPRSrini100% (1)
- Capacitance Voltage Transforme1Dokument4 SeitenCapacitance Voltage Transforme1ayushNoch keine Bewertungen
- 7SG11 Argus 1 2 4 and 6 Catalogue SheetDokument22 Seiten7SG11 Argus 1 2 4 and 6 Catalogue SheetGyan SagarNoch keine Bewertungen
- BCUDokument8 SeitenBCUJigyesh SharmaNoch keine Bewertungen
- Auxiliary Classical Ancillary Equipment CatalogueDokument94 SeitenAuxiliary Classical Ancillary Equipment CatalogueĐinh ĐạtNoch keine Bewertungen
- Line Current Differential Testing-A Practical ApproachDokument10 SeitenLine Current Differential Testing-A Practical ApproachmentongNoch keine Bewertungen
- One Case Study-Practical Protection Engineering BasicDokument4 SeitenOne Case Study-Practical Protection Engineering BasicarsalanhamidNoch keine Bewertungen
- Transformer Protection SchemesDokument5 SeitenTransformer Protection SchemesIppiNoch keine Bewertungen
- Chapter-7 Bus P.T. Voltage Selection SchemeDokument2 SeitenChapter-7 Bus P.T. Voltage Selection Schemerashid rahman100% (1)
- Upgrading The ProtectionDokument4 SeitenUpgrading The ProtectionMukesh KumarNoch keine Bewertungen
- Earth Fault RelayDokument1 SeiteEarth Fault RelayAliu AlaoNoch keine Bewertungen
- SEP671 REL670 Exercise 1 Distance Protection CharacteristicsDokument13 SeitenSEP671 REL670 Exercise 1 Distance Protection Characteristicsjdzarzalejo100% (1)
- SWGR PresentationDokument86 SeitenSWGR PresentationManirupa SinhaNoch keine Bewertungen
- Micom P642 Final Settings PDFDokument10 SeitenMicom P642 Final Settings PDFsupermannon100% (2)
- Distance Protection Setting Calculator 1Dokument6 SeitenDistance Protection Setting Calculator 1Mosa Elnaid ElnaidNoch keine Bewertungen
- REL 531-1-0 Line Distance Protection TerminalDokument20 SeitenREL 531-1-0 Line Distance Protection Terminalsenthil kumarNoch keine Bewertungen
- Feeder Terminal Product Guide REF 542plusDokument28 SeitenFeeder Terminal Product Guide REF 542plusRazvan MaresNoch keine Bewertungen
- 7VK87Dokument5 Seiten7VK87Ganesh DuraisamyNoch keine Bewertungen
- Setings Calculation New HavenDokument6 SeitenSetings Calculation New HavenWilfred AsonmwonririNoch keine Bewertungen
- Arrestor Energy Calculation PDFDokument6 SeitenArrestor Energy Calculation PDFpartha_gang4526Noch keine Bewertungen
- Distance Relay Principle: Suppose Relay Is Designed To Operate WhenDokument40 SeitenDistance Relay Principle: Suppose Relay Is Designed To Operate WhenAnonymous 9VcxlFErfNoch keine Bewertungen
- 7SR242 - Duobias Technical Manual Chapter 07 Applications GuideDokument56 Seiten7SR242 - Duobias Technical Manual Chapter 07 Applications GuideVishwanath TodurkarNoch keine Bewertungen
- 2H34 Application & Commisioning Manual Rev2 PDFDokument16 Seiten2H34 Application & Commisioning Manual Rev2 PDFking_electricalNoch keine Bewertungen
- 7SS52 Training 05 - 2009Dokument115 Seiten7SS52 Training 05 - 2009Ashok KumarNoch keine Bewertungen
- Easun Reyrolle India relay settingsDokument10 SeitenEasun Reyrolle India relay settingsVaneet GuptaNoch keine Bewertungen
- Busbar Differential Protection SchemeDokument9 SeitenBusbar Differential Protection SchemeGourav KumarNoch keine Bewertungen
- AG03-3005E en Directional Comparison Ground-Fault ProtectionDokument24 SeitenAG03-3005E en Directional Comparison Ground-Fault Protectionmubarakkirko0% (1)
- CT Class Very ImportantDokument6 SeitenCT Class Very ImportantEngr Fahimuddin QureshiNoch keine Bewertungen
- 7UM62 Installation Instr 02Dokument6 Seiten7UM62 Installation Instr 02Eduardo Garcia PNoch keine Bewertungen
- GE B90 PresentationDokument71 SeitenGE B90 PresentationIsuru WijewardeneNoch keine Bewertungen
- Schneider Electric Cahier Technique 151Dokument24 SeitenSchneider Electric Cahier Technique 151Anonymous BwLfvuNoch keine Bewertungen
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsVon EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen
- DistanceDokument16 SeitenDistanceMostafa Mohmmed100% (1)
- Application of Zone 3 Distance Relays On Transmission LinesDokument6 SeitenApplication of Zone 3 Distance Relays On Transmission LinesLog in 2007Noch keine Bewertungen
- Distance Protection of Series Compensated Transmission LineDokument9 SeitenDistance Protection of Series Compensated Transmission Lineyand_carlosNoch keine Bewertungen
- Robust Non-Communication Line Protection Scheme Using Novel QuantitiesDokument8 SeitenRobust Non-Communication Line Protection Scheme Using Novel QuantitiessunitharajababuNoch keine Bewertungen
- Blocking The Distance Relay 3 Zone Operation During Power Swings by DTLR Enhancement in MATLAB/SimulinkDokument9 SeitenBlocking The Distance Relay 3 Zone Operation During Power Swings by DTLR Enhancement in MATLAB/SimulinkprojectNoch keine Bewertungen
- 7SA513 CatalogueDokument16 Seiten7SA513 Catalogueaanouar77Noch keine Bewertungen
- Principles and Characteristics of Distance ProtectionDokument5 SeitenPrinciples and Characteristics of Distance ProtectionFrancisco MartinezNoch keine Bewertungen
- Fundamentals of Power System Protection Lecture 2: Protection Paradigms - Apparatus ProtectionDokument7 SeitenFundamentals of Power System Protection Lecture 2: Protection Paradigms - Apparatus Protectionsunny1725Noch keine Bewertungen
- Distance Protection RelayDokument27 SeitenDistance Protection RelaycallkalaiNoch keine Bewertungen
- Rms Rocf RelayDokument4 SeitenRms Rocf RelayRajesh BoddunaNoch keine Bewertungen
- Testing Low ImpedanceDokument48 SeitenTesting Low ImpedanceRajesh Bodduna100% (1)
- Areva P442 Protection by ArevaDokument50 SeitenAreva P442 Protection by ArevaRajesh BoddunaNoch keine Bewertungen
- Do You Remember Electromechanical RelaysDokument78 SeitenDo You Remember Electromechanical RelaysRajesh BoddunaNoch keine Bewertungen
- Testing and Commissioning JYDokument39 SeitenTesting and Commissioning JYRajesh BoddunaNoch keine Bewertungen
- Testing Distance Functions Using Settings and WorksheetsDokument32 SeitenTesting Distance Functions Using Settings and WorksheetsRajesh Bodduna75% (4)
- REL670 Testing ConsiderationsDokument29 SeitenREL670 Testing ConsiderationsRajesh Bodduna100% (5)
- Testing Directional Relay ElementsDokument14 SeitenTesting Directional Relay ElementsRajesh Bodduna100% (1)
- CT Saturation TutorialDokument44 SeitenCT Saturation TutorialRajesh Bodduna100% (1)
- 18a) Ground Distance RelaysDokument78 Seiten18a) Ground Distance RelaysRajesh Bodduna67% (3)
- Easun Reyrolle India relay settingsDokument10 SeitenEasun Reyrolle India relay settingsVaneet GuptaNoch keine Bewertungen
- Testing Transformer Differential RelaysDokument64 SeitenTesting Transformer Differential RelaysRajesh Bodduna100% (6)
- Directional CalculationsDokument10 SeitenDirectional CalculationsRajesh Bodduna50% (2)
- Alstom pd521Dokument222 SeitenAlstom pd521Rajesh Bodduna100% (2)
- Watts User Guide TD Central Unit Wifi 2019 09 Ttl2Dokument240 SeitenWatts User Guide TD Central Unit Wifi 2019 09 Ttl2Francesco PansaNoch keine Bewertungen
- SCANIA CoordInator PinoutDokument10 SeitenSCANIA CoordInator Pinoutnicamarcos83% (12)
- Instructions For Use of Weight Watchers Bathroom Scale: Scales byDokument2 SeitenInstructions For Use of Weight Watchers Bathroom Scale: Scales byAlma GarcíaNoch keine Bewertungen
- Annual Market Review & Forecast: Laser WeldingDokument40 SeitenAnnual Market Review & Forecast: Laser WeldingwwwpolNoch keine Bewertungen
- Genway WL CM 03NL User ManualDokument28 SeitenGenway WL CM 03NL User ManualVlad PetrescuNoch keine Bewertungen
- Digital Signal Processing by Ramesh BabuDokument76 SeitenDigital Signal Processing by Ramesh BabulaxmikanthNoch keine Bewertungen
- Soal Bahasa Inggris Kelas Ix Semester IDokument6 SeitenSoal Bahasa Inggris Kelas Ix Semester IIka Yuniati WinataNoch keine Bewertungen
- SQL Server Hardware EbookDokument329 SeitenSQL Server Hardware Ebookpimane100% (1)
- Basics of Vibration AnalysisDokument36 SeitenBasics of Vibration Analysisbagusindarto86% (7)
- Low Cost PCO Billing Meter PDFDokument1 SeiteLow Cost PCO Billing Meter PDFShrivlsi RamNoch keine Bewertungen
- Studies in Deep Strata Radio Communications U.S. Air Force and Raytheon Co., 10-1962.Dokument425 SeitenStudies in Deep Strata Radio Communications U.S. Air Force and Raytheon Co., 10-1962.Bob Laughlin, KWØRLNoch keine Bewertungen
- 3ADW000163R0201 - Technical Guide - e - B PDFDokument28 Seiten3ADW000163R0201 - Technical Guide - e - B PDFAhmed MoustafaNoch keine Bewertungen
- Toshiba EDokument12 SeitenToshiba EHettiarachchi JayasingheNoch keine Bewertungen
- 1176 PDFDokument169 Seiten1176 PDFJoshua PalizaNoch keine Bewertungen
- FKJ BI HK20 Computer EngineeringDokument5 SeitenFKJ BI HK20 Computer EngineeringMarcopolo GohNoch keine Bewertungen
- MultiplexingDokument38 SeitenMultiplexingBindhya Basini Mishra0% (1)
- MX711 MX81x Machine Type 7463Dokument834 SeitenMX711 MX81x Machine Type 7463Cristian Leonardo Lalangui Ruiz0% (1)
- Calibration of Eddycon CL - ENGDokument36 SeitenCalibration of Eddycon CL - ENGNathaniel LuraNoch keine Bewertungen
- MFA350 :: ROAL Living EnergyDokument7 SeitenMFA350 :: ROAL Living EnergyMinhNoch keine Bewertungen
- Maxon EC20 Flat 3wattDokument1 SeiteMaxon EC20 Flat 3wattElectromateNoch keine Bewertungen
- Basics of VFDDokument10 SeitenBasics of VFDMubarak BashaNoch keine Bewertungen
- RAK811 Lora Module Datasheet V1.3Dokument14 SeitenRAK811 Lora Module Datasheet V1.3Tonny-Leonard FarauanuNoch keine Bewertungen
- FTTH Drop and Indoor CablesDokument8 SeitenFTTH Drop and Indoor Cablesvijay_786Noch keine Bewertungen
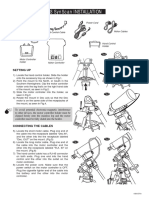
- EQ3 SynScan INSTALLATION guideDokument1 SeiteEQ3 SynScan INSTALLATION guideOscar MalamudNoch keine Bewertungen
- Curriculum of Bachelor in Industrial EngineeringDokument138 SeitenCurriculum of Bachelor in Industrial EngineeringPratikshya DevkotaNoch keine Bewertungen
- MATLAB Simulink IntroductionDokument21 SeitenMATLAB Simulink Introductionhodeegits9526Noch keine Bewertungen
- MTR3000 Basic Service Manual 68007024096 DDokument306 SeitenMTR3000 Basic Service Manual 68007024096 DSohaib Omer Salih100% (2)
- DFFHMDokument9 SeitenDFFHMyaswanthNoch keine Bewertungen
- Pulse Oximeter Schematics Rev DDokument2 SeitenPulse Oximeter Schematics Rev DRene Gonzales VasquezNoch keine Bewertungen
- READMEDokument8 SeitenREADMESukarno Wong PatiNoch keine Bewertungen