Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Procedimiento de Calibracion de Los TT1000A PDFDokument9 SeitenProcedimiento de Calibracion de Los TT1000A PDFjose gutierrezNoch keine Bewertungen
- Lamp IndicatorDokument2 SeitenLamp IndicatorNurdin FahimNoch keine Bewertungen
- Solenvis SL79 Itron Corus Gas Volume ConverterDokument4 SeitenSolenvis SL79 Itron Corus Gas Volume ConverterRomy RizkyNoch keine Bewertungen
- CS6461 - Computer Architecture Fall 2016 Instructor Morris LancasterDokument28 SeitenCS6461 - Computer Architecture Fall 2016 Instructor Morris Lancaster闫麟阁Noch keine Bewertungen
- Groundfos - SP 9-48Dokument10 SeitenGroundfos - SP 9-48suwono radukNoch keine Bewertungen
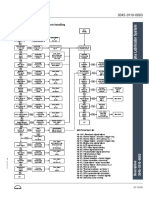
- 63 Sequence Diagram For Alarm HandlingDokument1 Seite63 Sequence Diagram For Alarm HandlingNick SkiadasNoch keine Bewertungen
- ESR Capacitor Meter Project PDFDokument22 SeitenESR Capacitor Meter Project PDFzoran_stev100% (1)
- Semiconductor QBDokument9 SeitenSemiconductor QBdheeraj rajNoch keine Bewertungen
- Ultrasonic Flaw Detector NOVOTEST UD2301Dokument3 SeitenUltrasonic Flaw Detector NOVOTEST UD2301Ashish SrivastavaNoch keine Bewertungen
- Slide On Line CodingDokument43 SeitenSlide On Line CodingShahin AhmedNoch keine Bewertungen
- Syllabus ECE 30500 - SchubertDokument2 SeitenSyllabus ECE 30500 - Schubertnawinnawmu1026Noch keine Bewertungen
- Scp-C. Instruction Manual 2009Dokument62 SeitenScp-C. Instruction Manual 2009Arkady ZabrovßkyNoch keine Bewertungen
- 8.1 Mux 2Dokument4 Seiten8.1 Mux 2Maddy TrichyNoch keine Bewertungen
- Two Port NetworkDokument7 SeitenTwo Port NetworkAzim KhanNoch keine Bewertungen
- GARRET PD 6500i User Manual ZONE 5-6 (ZONE 5 150+0%) : 3.5.20 RELAY Nio) Nic)Dokument8 SeitenGARRET PD 6500i User Manual ZONE 5-6 (ZONE 5 150+0%) : 3.5.20 RELAY Nio) Nic)Felipe MejiasNoch keine Bewertungen
- Chapt.3 DiodesDokument30 SeitenChapt.3 Diodesjeabum324Noch keine Bewertungen
- Transformers, Flexible and Reliable - BR009002ENDokument12 SeitenTransformers, Flexible and Reliable - BR009002ENKishor JadhavNoch keine Bewertungen
- Frontech User's Manual PDFDokument9 SeitenFrontech User's Manual PDF06l01a0224Noch keine Bewertungen
- Ds 11011Dokument3 SeitenDs 11011Walther EstevezNoch keine Bewertungen
- VM1000 BrochureDokument6 SeitenVM1000 Brochureambet TayloNoch keine Bewertungen
- OTDR TRAINING 83 SlideDokument83 SeitenOTDR TRAINING 83 SlideFerry Kurniawan80% (5)
- 1.2encoder AMT 103Dokument29 Seiten1.2encoder AMT 103MegaroboMegaroboNoch keine Bewertungen
- General Specifi Cations: XS770A Wireless Vibration SensorDokument5 SeitenGeneral Specifi Cations: XS770A Wireless Vibration SensorTommoNoch keine Bewertungen
- WPS 2Dokument41 SeitenWPS 2Armin PatelNoch keine Bewertungen
- Datasheet IC CARGA ZTE L2 PLUSDokument40 SeitenDatasheet IC CARGA ZTE L2 PLUSsamNoch keine Bewertungen
- FSP Dagger PRO User ManualDokument47 SeitenFSP Dagger PRO User ManualHarith FitryNoch keine Bewertungen
- DepikDokument8 SeitenDepikCharak Ram SNoch keine Bewertungen
- Manual Atlas CopcoDokument52 SeitenManual Atlas CopcoRobertoSoaresNoch keine Bewertungen
- EN Datasheet Copper SB RevCDokument1 SeiteEN Datasheet Copper SB RevCRoger Valenzuela HuamanNoch keine Bewertungen
- How To Completely Test LCD Inverter TransformeDokument9 SeitenHow To Completely Test LCD Inverter Transformeعلی اصغر هاشمیNoch keine Bewertungen