Das könnte Ihnen auch gefallen
- Subject: Analog and Mixed Signal Ic DesignDokument2 SeitenSubject: Analog and Mixed Signal Ic DesignchandravinitaNoch keine Bewertungen
- AMS Design Lab ProblemsDokument2 SeitenAMS Design Lab ProblemschandravinitaNoch keine Bewertungen
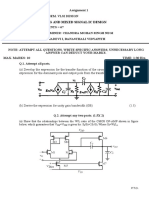
- Assignment BtechDokument3 SeitenAssignment BtechchandravinitaNoch keine Bewertungen
- Manual For Preparation of Project ReportDokument8 SeitenManual For Preparation of Project ReportchandravinitaNoch keine Bewertungen
- ANALOG IC TEST PAPER FOR ELECTRONICS STUDENTSDokument3 SeitenANALOG IC TEST PAPER FOR ELECTRONICS STUDENTSchandravinitaNoch keine Bewertungen
- Experiment List: M.Tech. II Sem. (VLSI) Analog & Mixed Signal IC Design LabDokument1 SeiteExperiment List: M.Tech. II Sem. (VLSI) Analog & Mixed Signal IC Design LabchandravinitaNoch keine Bewertungen
- Poster RapoDokument9 SeitenPoster RapochandravinitaNoch keine Bewertungen
- CLASS: B.TECH. VI SEM. (Electronics & Instrumentation)Dokument2 SeitenCLASS: B.TECH. VI SEM. (Electronics & Instrumentation)chandravinitaNoch keine Bewertungen
- Assignment BtechDokument3 SeitenAssignment BtechchandravinitaNoch keine Bewertungen
- Assignmt B.tech FOLIDokument1 SeiteAssignmt B.tech FOLIchandravinitaNoch keine Bewertungen
- MT 02013Dokument2 SeitenMT 02013chandravinitaNoch keine Bewertungen
- Subject: Analog and Mixed Signal Ic Design: ResistanceDokument2 SeitenSubject: Analog and Mixed Signal Ic Design: ResistancechandravinitaNoch keine Bewertungen
- CmnegiDokument23 SeitenCmnegichandravinitaNoch keine Bewertungen
- Problem 1Dokument2 SeitenProblem 1chandravinitaNoch keine Bewertungen
- AMS Design Lab ProblemsDokument1 SeiteAMS Design Lab ProblemschandravinitaNoch keine Bewertungen
- Experiment Distribution List2013Dokument1 SeiteExperiment Distribution List2013chandravinitaNoch keine Bewertungen
- Department of Electronics (AIM & ACT) Banasthali University Notice CompositeDokument2 SeitenDepartment of Electronics (AIM & ACT) Banasthali University Notice CompositechandravinitaNoch keine Bewertungen
- Guidelines For Preparation of Project Report: (Prescribed Format and Specification) 1. GeneralDokument11 SeitenGuidelines For Preparation of Project Report: (Prescribed Format and Specification) 1. GeneralchandravinitaNoch keine Bewertungen
- Subject: Analog and Mixed Signal Ic DesignDokument3 SeitenSubject: Analog and Mixed Signal Ic DesignchandravinitaNoch keine Bewertungen
- My WordsDokument2 SeitenMy WordschandravinitaNoch keine Bewertungen
- Philip Larkin Is One of BritainDokument7 SeitenPhilip Larkin Is One of Britainchandravinita100% (1)
- Nano ElectronicsDokument1 SeiteNano Electronicschandravinita100% (1)
- Introduction To SPICE & Modeling of MOSDokument36 SeitenIntroduction To SPICE & Modeling of MOSchandravinitaNoch keine Bewertungen
- Resonant Cavity QD Photo-detector for Far-IR DetectionDokument1 SeiteResonant Cavity QD Photo-detector for Far-IR DetectionchandravinitaNoch keine Bewertungen
- Transistor Modeling 2003Dokument47 SeitenTransistor Modeling 2003chandravinitaNoch keine Bewertungen
- Quantum Computing 1Dokument6 SeitenQuantum Computing 1chandravinitaNoch keine Bewertungen
- Syllabus For PHDFDokument2 SeitenSyllabus For PHDFchandravinitaNoch keine Bewertungen
- Transistor Modeling 2003Dokument47 SeitenTransistor Modeling 2003chandravinitaNoch keine Bewertungen
- Analog PracticalDokument1 SeiteAnalog PracticalchandravinitaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Eee421: Power Electronics: Power Semiconductor Devices: MOSFETDokument9 SeitenEee421: Power Electronics: Power Semiconductor Devices: MOSFETRafat ShamsNoch keine Bewertungen
- Extraction of Schottky Diode Parameters From Forward Current-Voltage CharacteristicsDokument4 SeitenExtraction of Schottky Diode Parameters From Forward Current-Voltage CharacteristicsChandu KakarlaNoch keine Bewertungen
- Data Sheets KN 320Dokument3 SeitenData Sheets KN 320alex rodriguezNoch keine Bewertungen
- Analog and Digital Meters Assignment 2Dokument2 SeitenAnalog and Digital Meters Assignment 2Caleb MaffinNoch keine Bewertungen
- Question & AnswersDokument31 SeitenQuestion & AnswersAdisu ZinabuNoch keine Bewertungen
- Effective Utilization of Eletrical Energy Using Tracking Circuit For Domestic Loads Part 2Dokument121 SeitenEffective Utilization of Eletrical Energy Using Tracking Circuit For Domestic Loads Part 2anil kumarNoch keine Bewertungen
- Battery CablesDokument1 SeiteBattery CablesKristaNoch keine Bewertungen
- Lecture 9: Transmission Lines: Instructor: Dr. Gleb V. Tcheslavski ContactDokument55 SeitenLecture 9: Transmission Lines: Instructor: Dr. Gleb V. Tcheslavski Contactkprk414Noch keine Bewertungen
- CALCULATIONS FOR BUSBAR & CONDUCTOR SIZINGDokument6 SeitenCALCULATIONS FOR BUSBAR & CONDUCTOR SIZINGRavindra GoyalNoch keine Bewertungen
- Model Rocket Launch SystemsDokument18 SeitenModel Rocket Launch SystemsAviation/Space History Library100% (1)
- 3 Electrical SafetyDokument19 Seiten3 Electrical SafetyGu YunruiNoch keine Bewertungen
- About Fuses and Choosing The Appropriate Fuse For Your Mod (Mamu)Dokument4 SeitenAbout Fuses and Choosing The Appropriate Fuse For Your Mod (Mamu)Jorge FarinhaNoch keine Bewertungen
- CLS Aipmt-19-20 XII Phy Study-Package-6 Level-1 Chapter-14 PDFDokument24 SeitenCLS Aipmt-19-20 XII Phy Study-Package-6 Level-1 Chapter-14 PDFMohammad Ashhar ImranNoch keine Bewertungen
- Site Acceptance Test Report For 11Kv Cable: Project Equipment Client Date Contractor Location Testing CompanyDokument3 SeitenSite Acceptance Test Report For 11Kv Cable: Project Equipment Client Date Contractor Location Testing CompanyGajendran SriramNoch keine Bewertungen
- 11 TMSS 02 R0Dokument0 Seiten11 TMSS 02 R0renjithas2005Noch keine Bewertungen
- Capitulo 09Dokument16 SeitenCapitulo 09Tamires MarianeNoch keine Bewertungen
- CT VT Calculation Al AIN Rev.2Dokument43 SeitenCT VT Calculation Al AIN Rev.2jm.mankavil623080% (5)
- Cmos PDFDokument61 SeitenCmos PDFRamakrishna BoyapatiNoch keine Bewertungen
- Experiment No.12 PDFDokument5 SeitenExperiment No.12 PDFAlisha AkterNoch keine Bewertungen
- 634648a250220 Ust Equivalent ResistanceDokument9 Seiten634648a250220 Ust Equivalent ResistanceBanana QNoch keine Bewertungen
- Fairchild Medium Power MosfetsDokument1 SeiteFairchild Medium Power MosfetsAmirNoch keine Bewertungen
- Physics Lab Manual: Error AnalysisDokument59 SeitenPhysics Lab Manual: Error AnalysiskaiyeeNoch keine Bewertungen
- LKS 2Dokument12 SeitenLKS 2Yuni Wanda LestariNoch keine Bewertungen
- Journal Pre-Proof: OptikDokument16 SeitenJournal Pre-Proof: Optikess_mnsNoch keine Bewertungen
- 2015-II. Flow SheetingDokument98 Seiten2015-II. Flow SheetinganisamaulidaaNoch keine Bewertungen
- Chapter 26 DC CircuitDokument43 SeitenChapter 26 DC CircuitDilo TanNoch keine Bewertungen
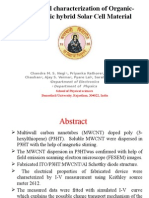
- Applied Physics ProjectDokument7 SeitenApplied Physics ProjectHarish Tripathi 14Noch keine Bewertungen
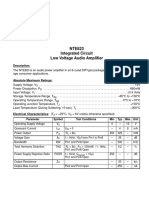
- NTE823 Integrated Circuit Low Voltage Audio Amplifier: DescriptionDokument3 SeitenNTE823 Integrated Circuit Low Voltage Audio Amplifier: DescriptionAbel RodriguezNoch keine Bewertungen
- ABB Manual 10E 02sDokument18 SeitenABB Manual 10E 02sjaved shaikh chaandNoch keine Bewertungen