Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- A Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InverterDokument10 SeitenA Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InvertererdemsecenNoch keine Bewertungen
- Temperature Measurement: Temperature Assemblies and Transmitters For The Process IndustryDokument32 SeitenTemperature Measurement: Temperature Assemblies and Transmitters For The Process IndustryfotopredicNoch keine Bewertungen
- EEE 54 DP2 DocumentationDokument5 SeitenEEE 54 DP2 DocumentationDarl John MendozaNoch keine Bewertungen
- Digitally Controlled Oscillator ReportDokument18 SeitenDigitally Controlled Oscillator ReportVinidhra ShivakumarNoch keine Bewertungen
- 8 ModulationDokument8 Seiten8 ModulationAhmadAkhbariNoch keine Bewertungen
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDokument16 SeitenUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- RB WobbulatorDokument8 SeitenRB WobbulatorNestor Alberto Escala0% (2)
- Ultra-Low Power Phase-Locked LoopDokument4 SeitenUltra-Low Power Phase-Locked Loophawking1122Noch keine Bewertungen
- UC3845 Technical ExplanationDokument15 SeitenUC3845 Technical ExplanationankurmalviyaNoch keine Bewertungen
- Low Phase Noise Current Starved Ring VCO On MOS Capacitance: Ashu Tilwe, R.C.Gurjar, D.K.MishraDokument6 SeitenLow Phase Noise Current Starved Ring VCO On MOS Capacitance: Ashu Tilwe, R.C.Gurjar, D.K.MishraManoj BoraNoch keine Bewertungen
- Wide Frequency Range Voltage Controlled Ring Oscillators Based On Transmission GatesDokument4 SeitenWide Frequency Range Voltage Controlled Ring Oscillators Based On Transmission GatesRam MNoch keine Bewertungen
- 5GHz VCODokument5 Seiten5GHz VCOnavinrkNoch keine Bewertungen
- 665report - Design of CMOS Ring VCO and Quadrature LC VCO For 8 Phases GenerationDokument17 Seiten665report - Design of CMOS Ring VCO and Quadrature LC VCO For 8 Phases GenerationapplebeeNoch keine Bewertungen
- A 15mw 3125ghz PLL For Serial Backplane Transceivers in 013m CmoDokument3 SeitenA 15mw 3125ghz PLL For Serial Backplane Transceivers in 013m CmoAhmed ShafeekNoch keine Bewertungen
- CMOS Current Starved Voltage Controlled Oscillator Circuit For A Fast Locking PLLDokument5 SeitenCMOS Current Starved Voltage Controlled Oscillator Circuit For A Fast Locking PLLSai KishoreNoch keine Bewertungen
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDokument4 SeitenA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiNoch keine Bewertungen
- Design of A Linear and Wide Range Current Starved Voltage Controlled Oscillator For PLLDokument8 SeitenDesign of A Linear and Wide Range Current Starved Voltage Controlled Oscillator For PLLJames MorenoNoch keine Bewertungen
- Powe Efficient PLLDokument12 SeitenPowe Efficient PLLjayalakshmisnairNoch keine Bewertungen
- CMOS 1.8GHz VCODokument4 SeitenCMOS 1.8GHz VCOsanjeevsoni64Noch keine Bewertungen
- Design Issues in CMOS OscillatorsDokument4 SeitenDesign Issues in CMOS OscillatorsdhrubNoch keine Bewertungen
- LC - VCO With One Octave Tuning RangeDokument5 SeitenLC - VCO With One Octave Tuning RangeGeorgeNoch keine Bewertungen
- MV - An E-Band Low-Noise Transformer-Coupled Quadrature VCO in 40 NM CMOSDokument9 SeitenMV - An E-Band Low-Noise Transformer-Coupled Quadrature VCO in 40 NM CMOSsm123ts456Noch keine Bewertungen
- 11 Chapter03 PDFDokument13 Seiten11 Chapter03 PDFAtulNoch keine Bewertungen
- A Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaiDokument7 SeitenA Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaitoloiceNoch keine Bewertungen
- Stability CMOS Ring OscillatorDokument4 SeitenStability CMOS Ring OscillatorkaaashuNoch keine Bewertungen
- Review Paper On Vco - FinalDokument4 SeitenReview Paper On Vco - FinalPunitAgrawalNoch keine Bewertungen
- Implementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerDokument6 SeitenImplementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerAlonso CoradoNoch keine Bewertungen
- Voltage Controlled Ring OscillatorDokument4 SeitenVoltage Controlled Ring OscillatorNurulMaisaraAwangNoch keine Bewertungen
- Eca Lab ManualDokument78 SeitenEca Lab ManualNageswariah.MNoch keine Bewertungen
- A Low Power VCO Design Using Composite Load For Delay Cell With IMOS Varactor For Wider Tuning RangeDokument21 SeitenA Low Power VCO Design Using Composite Load For Delay Cell With IMOS Varactor For Wider Tuning RangeDEEPAK PRAJAPATINoch keine Bewertungen
- 60W Flyback TIDokument16 Seiten60W Flyback TIe_magazin3821Noch keine Bewertungen
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Dokument17 SeitenSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiNoch keine Bewertungen
- Regular Correspondence: Compact High-Frequency Output Buffer For Testing of Analog CMOS VLSI CircuitsDokument3 SeitenRegular Correspondence: Compact High-Frequency Output Buffer For Testing of Analog CMOS VLSI CircuitsSaranya ChakrabortyNoch keine Bewertungen
- Interpretation Spectre SCDokument13 SeitenInterpretation Spectre SCFrederic DelmarcheNoch keine Bewertungen
- U-93 Application NOTE A New Integrated Circuit For Current Mode ControlDokument9 SeitenU-93 Application NOTE A New Integrated Circuit For Current Mode ControlpramodNoch keine Bewertungen
- Low Power VLSI Unit 2Dokument14 SeitenLow Power VLSI Unit 2JAI ROYALNoch keine Bewertungen
- PWM Inverters With Common DC-DC Converter Supply: Stepped Wave Synthesis From Pre-ProgrammedDokument7 SeitenPWM Inverters With Common DC-DC Converter Supply: Stepped Wave Synthesis From Pre-ProgrammedSumit HarwaniNoch keine Bewertungen
- Digital CMOS Logic Operation in The Sub-Threshold Region: Hendrawan Soeleman and Kaushik RoyDokument6 SeitenDigital CMOS Logic Operation in The Sub-Threshold Region: Hendrawan Soeleman and Kaushik Royphanindra21Noch keine Bewertungen
- Low-Voltage CMOS Analog Bootstrapped Switch For Sample-and-Hold Circuit: Design and Chip CharacterizationDokument4 SeitenLow-Voltage CMOS Analog Bootstrapped Switch For Sample-and-Hold Circuit: Design and Chip CharacterizationwhamcNoch keine Bewertungen
- Designs of CMOS Multi-Band Voltage Controlled Oscillator Using Active InductorsDokument4 SeitenDesigns of CMOS Multi-Band Voltage Controlled Oscillator Using Active Inductorsrahms79Noch keine Bewertungen
- Analogue Capacitance MetreDokument2 SeitenAnalogue Capacitance MetreSrihari ThammisettiNoch keine Bewertungen
- Nonlinear Effects in Oscillators and SynthesizersDokument23 SeitenNonlinear Effects in Oscillators and SynthesizersAKISNoch keine Bewertungen
- Low Swing Signaling Using A Dynamic Diode-Connected DriverDokument4 SeitenLow Swing Signaling Using A Dynamic Diode-Connected DriverAkash RaykarNoch keine Bewertungen
- (IJET-V1I6P3) Authors:Bachwad M.R., Maske Ashadeep MDokument4 Seiten(IJET-V1I6P3) Authors:Bachwad M.R., Maske Ashadeep MInternational Journal of Engineering and TechniquesNoch keine Bewertungen
- A High Slew-Rate Push-Pull Output Amplifier For Low-Quiescent Current Low-Dropout Regulators With Transient-Response ImprovementDokument5 SeitenA High Slew-Rate Push-Pull Output Amplifier For Low-Quiescent Current Low-Dropout Regulators With Transient-Response ImprovementsonofalexanderNoch keine Bewertungen
- L.C Oscillator Tutorial: 1 AbstractDokument18 SeitenL.C Oscillator Tutorial: 1 AbstractChi PhamNoch keine Bewertungen
- Synchronization MethodsDokument7 SeitenSynchronization MethodsAmit KumarNoch keine Bewertungen
- EE680Lab Experiment6-7Dokument21 SeitenEE680Lab Experiment6-7Amro AbusailNoch keine Bewertungen
- Experiment Number 7 Phase Locked Loop (PLL) : The Lock RangeDokument4 SeitenExperiment Number 7 Phase Locked Loop (PLL) : The Lock RangeNikita KanchanNoch keine Bewertungen
- Ultra-Low-Power 2.4 GHZ Colpitts Oscillator Based On Double Feedback TechniqueDokument4 SeitenUltra-Low-Power 2.4 GHZ Colpitts Oscillator Based On Double Feedback TechniqueCamila DamascenoNoch keine Bewertungen
- A Comparator With Reduced Delay Time in 65-nm CMOS For Supply Voltages Down To 0.65 VDokument5 SeitenA Comparator With Reduced Delay Time in 65-nm CMOS For Supply Voltages Down To 0.65 VSrinivasAnchalaNoch keine Bewertungen
- Demonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCODokument4 SeitenDemonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCOJeong-geun KimNoch keine Bewertungen
- IC Questions With Ans AnilsirDokument22 SeitenIC Questions With Ans AnilsirAniil J Kumaar50% (2)
- ZvsDokument29 SeitenZvsSandy RonaldoNoch keine Bewertungen
- Switched Capacitor FilterDokument20 SeitenSwitched Capacitor FilterArijit ShawNoch keine Bewertungen
- Design of Power Efficient CMOS Based Oscillator Circuit With Varactor Tuning ControlDokument8 SeitenDesign of Power Efficient CMOS Based Oscillator Circuit With Varactor Tuning ControlDEEPAK PRAJAPATINoch keine Bewertungen
- A 1.5-V 900-Mhz Monolithic Cmos Fast-Switching Frequency Synthesizer For Wireless ApplicationsDokument12 SeitenA 1.5-V 900-Mhz Monolithic Cmos Fast-Switching Frequency Synthesizer For Wireless ApplicationsKimi StrryNoch keine Bewertungen
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsVon EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNoch keine Bewertungen
- External Design Specification (EDS) Addendum: May 2016 Revision 001Dokument22 SeitenExternal Design Specification (EDS) Addendum: May 2016 Revision 001draNoch keine Bewertungen
- Babeesh Resume PDFDokument3 SeitenBabeesh Resume PDFEldhose VargheseNoch keine Bewertungen
- KKPPDokument9 SeitenKKPPEldhose VargheseNoch keine Bewertungen
- Babeesh Resume PDFDokument3 SeitenBabeesh Resume PDFEldhose VargheseNoch keine Bewertungen
- Software - Software 105 Embedded C - Introduction To Embedded C ProgrammingDokument111 SeitenSoftware - Software 105 Embedded C - Introduction To Embedded C ProgrammingEldhose VargheseNoch keine Bewertungen
- Rfengines ResamplingDokument21 SeitenRfengines ResamplingEldhose VargheseNoch keine Bewertungen
- DRM Specs 201 968Dokument195 SeitenDRM Specs 201 968Eldhose VargheseNoch keine Bewertungen
- Sampling and Interpolation: Yao Wang Polytechnic University, Brooklyn, NY11201Dokument34 SeitenSampling and Interpolation: Yao Wang Polytechnic University, Brooklyn, NY11201Bedanga KashyapNoch keine Bewertungen
- Introduction of C For DSP ApplicationDokument18 SeitenIntroduction of C For DSP Applicationvsmundim100% (1)
- Ec 2000Dokument16 SeitenEc 2000Anuj TiwariNoch keine Bewertungen
- ZXCT1041 Bidirectional Precision High-Side Current Monitor: DescriptionDokument12 SeitenZXCT1041 Bidirectional Precision High-Side Current Monitor: DescriptionEldhose VargheseNoch keine Bewertungen
- PSK, FSK, QPSKDokument10 SeitenPSK, FSK, QPSKSathia RajNoch keine Bewertungen
- Final Practice 2009Dokument7 SeitenFinal Practice 2009Eldhose VargheseNoch keine Bewertungen
- Midterm1 2009Dokument5 SeitenMidterm1 2009Eldhose VargheseNoch keine Bewertungen
- (WWW - Entrance Exam - Net) PaperDokument4 Seiten(WWW - Entrance Exam - Net) PaperEldhose VargheseNoch keine Bewertungen
- AbstractDokument1 SeiteAbstractEldhose VargheseNoch keine Bewertungen
- The Depletion Type MOSFETDokument4 SeitenThe Depletion Type MOSFETsarvajee216Noch keine Bewertungen
- Ec 2000Dokument16 SeitenEc 2000Anuj TiwariNoch keine Bewertungen
- NanotechnologyDokument2 SeitenNanotechnologyEldhose VargheseNoch keine Bewertungen
- Avrdude Doc 5.11Dokument41 SeitenAvrdude Doc 5.11Carlos Marinho SilvaNoch keine Bewertungen
- Chameleon ChipsDokument12 SeitenChameleon Chipsgnani568Noch keine Bewertungen
- Quadratic EquationsDokument2 SeitenQuadratic EquationsEldhose VargheseNoch keine Bewertungen
- Porifera and CnidariaDokument16 SeitenPorifera and CnidariaMichaelNoch keine Bewertungen
- Splices LAS 3rd Quarter Week 1Dokument6 SeitenSplices LAS 3rd Quarter Week 1Winnielyn Quarteros BarreraNoch keine Bewertungen
- The Path Vol 9 - William JudgeDokument472 SeitenThe Path Vol 9 - William JudgeMark R. JaquaNoch keine Bewertungen
- Hssive-Xi-Chem-4. Chemical Bonding and Molecular Structure Q & ADokument11 SeitenHssive-Xi-Chem-4. Chemical Bonding and Molecular Structure Q & AArties MNoch keine Bewertungen
- Angles, Bearings and AzimuthDokument10 SeitenAngles, Bearings and AzimuthMarc Dared CagaoanNoch keine Bewertungen
- Kaibigan, Kabarkada, Kaeskwela: Pinoy Friendships and School LifeDokument47 SeitenKaibigan, Kabarkada, Kaeskwela: Pinoy Friendships and School LifeGerald M. LlanesNoch keine Bewertungen
- Reaffirmed 1998Dokument13 SeitenReaffirmed 1998builconsNoch keine Bewertungen
- Electron LayoutDokument14 SeitenElectron LayoutSaswat MohantyNoch keine Bewertungen
- 555 TimerDokument25 Seiten555 TimerDr-Muhammad Aqeel AslamNoch keine Bewertungen
- COE301 Lab 2 Introduction MIPS AssemblyDokument7 SeitenCOE301 Lab 2 Introduction MIPS AssemblyItz Sami UddinNoch keine Bewertungen
- The Role of IT in TQM L'Oreal Case StudyDokument9 SeitenThe Role of IT in TQM L'Oreal Case StudyUdrea RoxanaNoch keine Bewertungen
- Kalitantra-Shava Sadhana - WikipediaDokument5 SeitenKalitantra-Shava Sadhana - WikipediaGiano BellonaNoch keine Bewertungen
- Norm ANSI PDFDokument1 SeiteNorm ANSI PDFAbdul Quddus Mat IsaNoch keine Bewertungen
- Training Structure - Thinkific Plus TemplateDokument7 SeitenTraining Structure - Thinkific Plus TemplateQIONG WUNoch keine Bewertungen
- English 9 Week 5 Q4Dokument4 SeitenEnglish 9 Week 5 Q4Angel EjeNoch keine Bewertungen
- Porsche Dealer Application DataDokument3 SeitenPorsche Dealer Application DataEdwin UcheNoch keine Bewertungen
- Def - Pemf Chronic Low Back PainDokument17 SeitenDef - Pemf Chronic Low Back PainFisaudeNoch keine Bewertungen
- MATLAB For Data VisualizationDokument63 SeitenMATLAB For Data Visualizationfahmi fawjiNoch keine Bewertungen
- Addpac AP1000 DSDokument2 SeitenAddpac AP1000 DSEnrique RamosNoch keine Bewertungen
- Classroom Activty Rubrics Classroom Activty Rubrics: Total TotalDokument1 SeiteClassroom Activty Rubrics Classroom Activty Rubrics: Total TotalMay Almerez- WongNoch keine Bewertungen
- Limited Alembic: Employee Related DataDokument4 SeitenLimited Alembic: Employee Related DataTp EarningsNoch keine Bewertungen
- Practical Research 2 Group 11 RRL, Proposed Title and Answers To The QuestionsDokument14 SeitenPractical Research 2 Group 11 RRL, Proposed Title and Answers To The QuestionsFeby Margaret AngNoch keine Bewertungen
- CV - Mohsin FormatDokument2 SeitenCV - Mohsin FormatMuhammad Junaid IqbalNoch keine Bewertungen
- Objective-C Succinctly PDFDokument110 SeitenObjective-C Succinctly PDFTKKNoch keine Bewertungen
- LUNG ARTIFACTSreviewDokument13 SeitenLUNG ARTIFACTSreviewMayra ValderramaNoch keine Bewertungen
- LC 67002000 B Hr-Jumbo enDokument2 SeitenLC 67002000 B Hr-Jumbo enJulio OrtegaNoch keine Bewertungen
- Mat101 w12 Hw6 SolutionsDokument8 SeitenMat101 w12 Hw6 SolutionsKonark PatelNoch keine Bewertungen
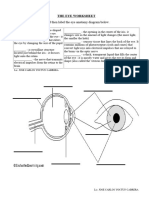
- The Eye WorksheetDokument3 SeitenThe Eye WorksheetCally ChewNoch keine Bewertungen
- Chemistry For Changing Times 14th Edition Hill Mccreary Solution ManualDokument24 SeitenChemistry For Changing Times 14th Edition Hill Mccreary Solution ManualElaineStewartieog100% (50)