Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Long 1988Dokument4 SeitenLong 1988Ovirus OviNoch keine Bewertungen
- DND Homebrew Ideas V1 - The HomebreweryDokument3 SeitenDND Homebrew Ideas V1 - The HomebreweryKalazans CardialNoch keine Bewertungen
- 576 1 1179 1 10 20181220Dokument15 Seiten576 1 1179 1 10 20181220Sana MuzaffarNoch keine Bewertungen
- AASW Code of Ethics-2004Dokument36 SeitenAASW Code of Ethics-2004Steven TanNoch keine Bewertungen
- The Training Toolbox: Forced Reps - The Real Strength SenseiDokument7 SeitenThe Training Toolbox: Forced Reps - The Real Strength SenseiSean DrewNoch keine Bewertungen
- Foxit PhantomPDF For HP - Quick GuideDokument32 SeitenFoxit PhantomPDF For HP - Quick GuidekhilmiNoch keine Bewertungen
- Finding Nemo 2Dokument103 SeitenFinding Nemo 2julianaNoch keine Bewertungen
- HW 3 or MethodsDokument5 SeitenHW 3 or Methodsaidoutza2101Noch keine Bewertungen
- Term-2 - Grade 8 Science (Biology) Mock Paper-2Dokument3 SeitenTerm-2 - Grade 8 Science (Biology) Mock Paper-2bhagat100% (1)
- Theater 10 Syllabus Printed PDFDokument7 SeitenTheater 10 Syllabus Printed PDFJim QuentinNoch keine Bewertungen
- Mezbah Uddin Ahmed (173-017-054) Chapter 11Dokument12 SeitenMezbah Uddin Ahmed (173-017-054) Chapter 11riftNoch keine Bewertungen
- Clearing Negative SpiritsDokument6 SeitenClearing Negative SpiritsmehorseblessedNoch keine Bewertungen
- A Terrifying ExperienceDokument1 SeiteA Terrifying ExperienceHamshavathini YohoratnamNoch keine Bewertungen
- Reliability Technoology For Submarine Repeaters PDFDokument8 SeitenReliability Technoology For Submarine Repeaters PDFbolermNoch keine Bewertungen
- Fire Art Case StudyDokument15 SeitenFire Art Case StudyKimberlyHerring100% (1)
- Balezi - Annale Générale Vol 4 - 1 - 2 Fin OkDokument53 SeitenBalezi - Annale Générale Vol 4 - 1 - 2 Fin OkNcangu BenjaminNoch keine Bewertungen
- Large Span Structure: MMBC-VDokument20 SeitenLarge Span Structure: MMBC-VASHFAQNoch keine Bewertungen
- Sukhtankar Vaishnav Corruption IPF - Full PDFDokument79 SeitenSukhtankar Vaishnav Corruption IPF - Full PDFNikita anandNoch keine Bewertungen
- Annexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsDokument1 SeiteAnnexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsMannepalli RamakrishnaNoch keine Bewertungen
- Writing - Hidden Curriculum v2 EditedDokument6 SeitenWriting - Hidden Curriculum v2 EditedwhighfilNoch keine Bewertungen
- Simulation of Channel Estimation and Equalization For WiMAX PHY Layer in Simulink PDFDokument6 SeitenSimulation of Channel Estimation and Equalization For WiMAX PHY Layer in Simulink PDFayadmanNoch keine Bewertungen
- 38 Bayan Muna Vs MendozaDokument3 Seiten38 Bayan Muna Vs MendozaDavid Antonio A. EscuetaNoch keine Bewertungen
- Research ProposalDokument45 SeitenResearch ProposalAaliyah Marie AbaoNoch keine Bewertungen
- Thomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFDokument433 SeitenThomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFMarcelo Ramos100% (2)
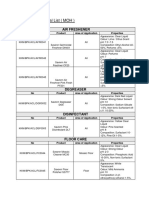
- Approved Chemical ListDokument2 SeitenApproved Chemical ListSyed Mansur Alyahya100% (1)
- Liver Disease With PregnancyDokument115 SeitenLiver Disease With PregnancyAmro Ahmed Abdelrhman100% (3)
- Design Thinking PDFDokument7 SeitenDesign Thinking PDFFernan SantosoNoch keine Bewertungen
- Zero Power Factor Method or Potier MethodDokument1 SeiteZero Power Factor Method or Potier MethodMarkAlumbroTrangiaNoch keine Bewertungen
- 1E Star Trek Customizable Card Game - 6 First Contact Rule SupplementDokument11 Seiten1E Star Trek Customizable Card Game - 6 First Contact Rule Supplementmrtibbles100% (1)
- Finding The NTH Term of An Arithmetic SequenceDokument3 SeitenFinding The NTH Term of An Arithmetic SequenceArdy PatawaranNoch keine Bewertungen