Das könnte Ihnen auch gefallen
- Basic Motor TheoryDokument48 SeitenBasic Motor Theoryantoniogh2Noch keine Bewertungen
- Generators and MotorsDokument9 SeitenGenerators and Motorseng.muhammad.waterNoch keine Bewertungen
- Motors and Generators SummaryDokument17 SeitenMotors and Generators SummaryMNoch keine Bewertungen
- Magnetism: Systems Operation - FundamentalsDokument10 SeitenMagnetism: Systems Operation - Fundamentalsrigoberto otinianoNoch keine Bewertungen
- Production Engineering Fundamentals of Electricity, Magnetism, and CircuitsDokument13 SeitenProduction Engineering Fundamentals of Electricity, Magnetism, and CircuitsDedf †Noch keine Bewertungen
- Chapter 3Dokument92 SeitenChapter 3tamaramarcuNoch keine Bewertungen
- Electro 3 Finals Task PerformanceDokument23 SeitenElectro 3 Finals Task PerformanceJuan Miguel TorresNoch keine Bewertungen
- Gunderson Solid-State Generator Moves Magnetic Flux Without Moving PartsDokument0 SeitenGunderson Solid-State Generator Moves Magnetic Flux Without Moving PartsmatijahNoch keine Bewertungen
- Physics ProjectDokument20 SeitenPhysics Projectblah68194Noch keine Bewertungen
- Motors and Generators: First Hand Investigations From The SyllabusDokument26 SeitenMotors and Generators: First Hand Investigations From The SyllabusAbdullionNoch keine Bewertungen
- Automatic Drain CleanerDokument45 SeitenAutomatic Drain CleanerArun Kumar Yadav70% (10)
- Macalalag Lab 2Dokument18 SeitenMacalalag Lab 2Jaloyd MacalalagNoch keine Bewertungen
- Eddy-Current-Brakes Seminar Report PDFDokument21 SeitenEddy-Current-Brakes Seminar Report PDFprashanta padhiary50% (4)
- Anil KumarDokument15 SeitenAnil KumarRanjith BhoopalNoch keine Bewertungen
- Nota & Latihan Bab 8Dokument9 SeitenNota & Latihan Bab 8Saiful NizamNoch keine Bewertungen
- Basic Motor TheoryDokument39 SeitenBasic Motor Theoryarfat_ahmad_khanNoch keine Bewertungen
- Experiment No. 2: Determining Flux, Field System, Flux Level and Induced EMF of an Electrical MachineDokument18 SeitenExperiment No. 2: Determining Flux, Field System, Flux Level and Induced EMF of an Electrical MachineIrish SantosNoch keine Bewertungen
- Assignment emDokument13 SeitenAssignment emahmednabeel92hotmailNoch keine Bewertungen
- Group 3 PresentsDokument18 SeitenGroup 3 PresentsShannie Longakit RacomaNoch keine Bewertungen
- Eddy CurrentsDokument9 SeitenEddy CurrentsSwaroop KumarNoch keine Bewertungen
- Part A: Theory/ Scientific PrincipleDokument11 SeitenPart A: Theory/ Scientific PrincipleJay CherizNoch keine Bewertungen
- Electrical Engineering: University of Baghdad College of Engineering Department of Mechanical EngineeringDokument15 SeitenElectrical Engineering: University of Baghdad College of Engineering Department of Mechanical Engineeringرسول ناصر كريم خريبطNoch keine Bewertungen
- Generator and MotorDokument19 SeitenGenerator and Motortrihandoko1631Noch keine Bewertungen
- Fundamentals of Magnetism and Electrical SystemsDokument9 SeitenFundamentals of Magnetism and Electrical SystemsWellington FrançaNoch keine Bewertungen
- Electromagnetic Induction LecturesDokument9 SeitenElectromagnetic Induction LecturesDoyen DanielNoch keine Bewertungen
- Concept of Electricity EnerationDokument7 SeitenConcept of Electricity EnerationAbhishekNoch keine Bewertungen
- Eee - 7Dokument30 SeitenEee - 7TanvirNoch keine Bewertungen
- Welding: A. Arslan KAYA, Prof. Dr. Anadolu University and Muğla UniversityDokument58 SeitenWelding: A. Arslan KAYA, Prof. Dr. Anadolu University and Muğla UniversityŞafakk CanıberkkNoch keine Bewertungen
- Basic Motor Theory ExplainedDokument7 SeitenBasic Motor Theory ExplainedSSEKANJAKO PatrickNoch keine Bewertungen
- Unit 3Dokument42 SeitenUnit 3Anbazhagan SelvanathanNoch keine Bewertungen
- Exer 8 DV-3LDokument5 SeitenExer 8 DV-3LdeusleanNoch keine Bewertungen
- Tapassss Bbhhaaiiiiiiii FinalDokument16 SeitenTapassss Bbhhaaiiiiiiii FinalSunilNoch keine Bewertungen
- Magnetic FieldDokument44 SeitenMagnetic FieldAbdulfatai AbdulrasheedNoch keine Bewertungen
- DC Motors ExplainedDokument10 SeitenDC Motors ExplainedJohna Mae Dolar EtangNoch keine Bewertungen
- Introduction To MachinaryDokument18 SeitenIntroduction To MachinaryKimsairng CheaNoch keine Bewertungen
- Applications of Electromagnetic InductionDokument6 SeitenApplications of Electromagnetic InductionAdeniji OlusegunNoch keine Bewertungen
- Basic Motor TheoryDokument26 SeitenBasic Motor TheoryRoberth Salsr LpzNoch keine Bewertungen
- Eddy CurrentsDokument5 SeitenEddy CurrentsDivyanshu KaushikNoch keine Bewertungen
- MagnetoDokument28 SeitenMagnetoDonald WhiteNoch keine Bewertungen
- Magnetism and Electromagnetism: Learning OutcomeDokument14 SeitenMagnetism and Electromagnetism: Learning OutcomeMandeep MalikNoch keine Bewertungen
- 13.0 ELECTROMAGNETISM My NC Notes PDFDokument29 Seiten13.0 ELECTROMAGNETISM My NC Notes PDFRanga MudzieNoch keine Bewertungen
- DC Motor ReportDokument4 SeitenDC Motor ReportbafulcherNoch keine Bewertungen
- Application of DC Shunt MotorDokument5 SeitenApplication of DC Shunt MotorPrajwal Deep RaiNoch keine Bewertungen
- Chapter 6Dokument33 SeitenChapter 6sanjanaNoch keine Bewertungen
- Title: Comparative Study of Electromagnetic Braking System With Conventional BrakingDokument6 SeitenTitle: Comparative Study of Electromagnetic Braking System With Conventional BrakingTech MitNoch keine Bewertungen
- Reversibility of Electric Motor and Dynamo Effect by SazzadDokument5 SeitenReversibility of Electric Motor and Dynamo Effect by Sazzadsaz889977Noch keine Bewertungen
- Why Ac DC TransformersDokument21 SeitenWhy Ac DC Transformersapi-252130436Noch keine Bewertungen
- Magnetic FieldDokument19 SeitenMagnetic FieldNitinSrivastava100% (2)
- Mod 3 Book 4 Ac & DC Machine TheoryDokument62 SeitenMod 3 Book 4 Ac & DC Machine Theoryranjit prasadNoch keine Bewertungen
- Lecture 3 I&M Electromechanical Indicating Instrument 1Dokument18 SeitenLecture 3 I&M Electromechanical Indicating Instrument 1Asad Saeed0% (1)
- Topic 4 Electromagnetic Effects PDFDokument10 SeitenTopic 4 Electromagnetic Effects PDFHakim Abbas Ali PhalasiyaNoch keine Bewertungen
- AC Definitons and Other ChurvaDokument7 SeitenAC Definitons and Other ChurvaErvin GohNoch keine Bewertungen
- Physics 12th ProjectDokument11 SeitenPhysics 12th ProjectVed RameshNoch keine Bewertungen
- Understanding Magnetism And..Dokument16 SeitenUnderstanding Magnetism And..ujwol_phaijuNoch keine Bewertungen
- 1 AlternatorDokument29 Seiten1 AlternatorMwasi KivingeNoch keine Bewertungen
- Electrical Basic Generator GuideDokument27 SeitenElectrical Basic Generator GuidesantoshkumarNoch keine Bewertungen
- How Does An Induction Motor WorkDokument7 SeitenHow Does An Induction Motor WorkLeandro CamargoNoch keine Bewertungen
- EE352 Chapter #3 Electromechanical Energy ConversionDokument12 SeitenEE352 Chapter #3 Electromechanical Energy ConversionCan ARABACINoch keine Bewertungen
- Fundamentals of MagnetismDokument7 SeitenFundamentals of MagnetismMunir MuktarNoch keine Bewertungen
- Heatload Design Guidlines PDFDokument3 SeitenHeatload Design Guidlines PDFdomcristiniNoch keine Bewertungen
- Cast Iron Soil Pipe and Fittings For Drain Waste Vent 315c16a1 PDFDokument88 SeitenCast Iron Soil Pipe and Fittings For Drain Waste Vent 315c16a1 PDFvermaroshanNoch keine Bewertungen
- BCBC 2018dbp1s13r2 PDFDokument32 SeitenBCBC 2018dbp1s13r2 PDFdomcristiniNoch keine Bewertungen
- Using Waste Heat For Energy Savings: Large Commercial, Institutional, Industrial FacilitiesDokument6 SeitenUsing Waste Heat For Energy Savings: Large Commercial, Institutional, Industrial FacilitiesdomcristiniNoch keine Bewertungen
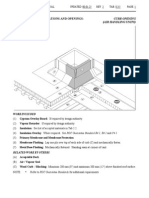
- RCABC Roof Curb Pentrations and OpeningsDokument13 SeitenRCABC Roof Curb Pentrations and OpeningsdomcristiniNoch keine Bewertungen
- Report 04.02.20Dokument4 SeitenReport 04.02.20Kartik SoniNoch keine Bewertungen
- Diesel Engines for Unrestricted Continuous OperationDokument2 SeitenDiesel Engines for Unrestricted Continuous OperationJorge Bellido100% (1)
- IGBC Annual Review 2011-2012Dokument28 SeitenIGBC Annual Review 2011-2012Sourav SenNoch keine Bewertungen
- Dpu96 Sitras PDFDokument214 SeitenDpu96 Sitras PDFConrad Ziebold VanakenNoch keine Bewertungen
- Air Cooler LeafletDokument2 SeitenAir Cooler LeafletSaad zubayr MNoch keine Bewertungen
- National Science Olympiad: SyllabusDokument4 SeitenNational Science Olympiad: SyllabusawaninderNoch keine Bewertungen
- General-Purpose Steam Turbines (Amendments/Supplements To Api 611)Dokument27 SeitenGeneral-Purpose Steam Turbines (Amendments/Supplements To Api 611)BiswasNoch keine Bewertungen
- Projects Oil and Gas BrochureDokument20 SeitenProjects Oil and Gas BrochureRussel John RamosNoch keine Bewertungen
- R6.3 TR-XXL Parameter Settings ReleaseDokument493 SeitenR6.3 TR-XXL Parameter Settings Releasemishu35Noch keine Bewertungen
- Ul 854 - 2014 PDFDokument64 SeitenUl 854 - 2014 PDFDouglasNoch keine Bewertungen
- MANUAL Vdocuments - Site FG Wilson P88e1Dokument287 SeitenMANUAL Vdocuments - Site FG Wilson P88e1eletronica55100% (2)
- TDFC Global Engineering Solutions CompanyDokument189 SeitenTDFC Global Engineering Solutions CompanyplanningNoch keine Bewertungen
- Flux and Refining Agent InjectionDokument1 SeiteFlux and Refining Agent InjectionСтанислав ПодольскийNoch keine Bewertungen
- Medium Power Substation Instruction ManualDokument24 SeitenMedium Power Substation Instruction ManualOmar GraterolNoch keine Bewertungen
- Water Standard Specification Index As On Dec 2015Dokument10 SeitenWater Standard Specification Index As On Dec 2015afp15060% (1)
- ECU Mount-On-Engine Vibration StudyDokument6 SeitenECU Mount-On-Engine Vibration StudyElroy LeeNoch keine Bewertungen
- 2007 Bachu Etal CO2 Storage Capacity EstimationDokument14 Seiten2007 Bachu Etal CO2 Storage Capacity EstimationArindam Obzi GuptaNoch keine Bewertungen
- India's Former President APJ Abdul Kalam on Leadership, Knowledge and Managing FailureDokument14 SeitenIndia's Former President APJ Abdul Kalam on Leadership, Knowledge and Managing FailureHarsh TiwariNoch keine Bewertungen
- Seller'S Disclosure and Condition of Property Addendum (Residential)Dokument8 SeitenSeller'S Disclosure and Condition of Property Addendum (Residential)Barbara BishopNoch keine Bewertungen
- ECU MS 3 Sport GT3 Cup Manual Setup GuideDokument26 SeitenECU MS 3 Sport GT3 Cup Manual Setup GuideAngel LópezNoch keine Bewertungen
- Water Level IndicatorDokument5 SeitenWater Level IndicatorRahul JadhavNoch keine Bewertungen
- Fluid Flow Applications: SolutionDokument6 SeitenFluid Flow Applications: Solutionmanikandaprabhu.rk14Noch keine Bewertungen
- Transport Phenomena: Instructor: Assistant Professor Department of Chemical Engineering, BUET, Dhaka-1000Dokument21 SeitenTransport Phenomena: Instructor: Assistant Professor Department of Chemical Engineering, BUET, Dhaka-1000touhidNoch keine Bewertungen
- Esite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enDokument4 SeitenEsite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enrolandoNoch keine Bewertungen
- Unit 1Dokument36 SeitenUnit 1MonishNoch keine Bewertungen
- Krff302ess01 Tech Sheet - w10787422 - Rev CDokument10 SeitenKrff302ess01 Tech Sheet - w10787422 - Rev CJesikaGomezSaavedraNoch keine Bewertungen
- Q 1000Dokument24 SeitenQ 1000Fredy Vázquez VelázquezNoch keine Bewertungen
- Safety LOPADokument28 SeitenSafety LOPAnandorg1113100% (1)
- Wet Steam Washing SystemDokument7 SeitenWet Steam Washing SystemPrudhvi Raj100% (1)
- Power Generation SystemDokument72 SeitenPower Generation SystemAbshir Mohamed HajjiNoch keine Bewertungen