Das könnte Ihnen auch gefallen
- Bidirectional DC-DC Converter With Full-Bridge / Push-Pull Circuit For Automobile Electric Power SystemsDokument5 SeitenBidirectional DC-DC Converter With Full-Bridge / Push-Pull Circuit For Automobile Electric Power SystemsPaulo UchihaNoch keine Bewertungen
- DC Link CurrentDokument8 SeitenDC Link CurrentsubbannaNoch keine Bewertungen
- Generation and Classification of PWM DC-DC ConvertersDokument12 SeitenGeneration and Classification of PWM DC-DC ConvertersHoang TuanNoch keine Bewertungen
- Frequency To Voltage Converter ReportDokument5 SeitenFrequency To Voltage Converter ReportEssa SiddiquiNoch keine Bewertungen
- "Bridge B2HZ" For The Control of A DC MotorDokument16 Seiten"Bridge B2HZ" For The Control of A DC MotorhadiNoch keine Bewertungen
- LM2907 LM2917 Conversor F - VDokument18 SeitenLM2907 LM2917 Conversor F - VAlejandra Vasquez GiraldoNoch keine Bewertungen
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDokument7 SeitenTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Lab Report On ECE 210 Lab1Dokument6 SeitenLab Report On ECE 210 Lab1Joanne Lai100% (1)
- SEPIC ConverterDokument16 SeitenSEPIC ConverterDina GaranNoch keine Bewertungen
- Lab Manual - EEE 402 - Exp01 July2014Dokument7 SeitenLab Manual - EEE 402 - Exp01 July2014AhammadSifatNoch keine Bewertungen
- Buck ReportDokument9 SeitenBuck ReportNaeem GulNoch keine Bewertungen
- Service Manual RAINBOW 180E EnglishDokument54 SeitenService Manual RAINBOW 180E EnglishJaroslaw BrzozowskiNoch keine Bewertungen
- Fuel Cell 10 KW Inverter SystemDokument60 SeitenFuel Cell 10 KW Inverter Systemismailbej100% (1)
- Memristor DocumentationDokument33 SeitenMemristor Documentationsyviswanath100% (8)
- Self Oscillating Flyback ConverterDokument7 SeitenSelf Oscillating Flyback ConverterNaren DranNoch keine Bewertungen
- Generalized Average Modeling of Dual ActiveDokument7 SeitenGeneralized Average Modeling of Dual ActiveHarsh ChittoraNoch keine Bewertungen
- CMOS PortDokument46 SeitenCMOS PortZali100% (1)
- Nonlinear Peltier Effect in Semiconductors.Dokument4 SeitenNonlinear Peltier Effect in Semiconductors.danielglezaNoch keine Bewertungen
- Power Rectifier ASIC ControllerDokument5 SeitenPower Rectifier ASIC ControllerQuang TaNoch keine Bewertungen
- Novel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreDokument11 SeitenNovel Switching Sequences For A Space Vector Modulated Three Level Inverter-LibreHollie RosaNoch keine Bewertungen
- Full Wave RectifierDokument7 SeitenFull Wave RectifierArun PratapNoch keine Bewertungen
- Representation of Power Systems: 1.1 One Line DiagramDokument17 SeitenRepresentation of Power Systems: 1.1 One Line DiagramDr. Gollapalli Naresh100% (1)
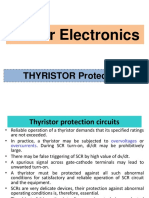
- Power Electronics: THYRISTOR ProtectionDokument12 SeitenPower Electronics: THYRISTOR ProtectionK Lokesh LingaiahNoch keine Bewertungen
- A Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsDokument12 SeitenA Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsBritto TigerNoch keine Bewertungen
- An Improved Battery Characterization Method Using A Two Pulse Load TestDokument6 SeitenAn Improved Battery Characterization Method Using A Two Pulse Load Testsweet85sNoch keine Bewertungen
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDokument6 SeitenOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNoch keine Bewertungen
- Brushless Sensor ConfigDokument11 SeitenBrushless Sensor ConfigAlexandru TimofteNoch keine Bewertungen
- Modeling Transformers With Internal Incipient FaultsDokument18 SeitenModeling Transformers With Internal Incipient FaultsDebajyoti Mishra100% (1)
- Transformer Tap ChangerDokument2 SeitenTransformer Tap ChangerIskeel Sadiq100% (1)
- PSOC Module 2Dokument20 SeitenPSOC Module 2Priyadarshi MNoch keine Bewertungen
- Report of Project 18pulseDokument6 SeitenReport of Project 18pulsedhaval2430100% (1)
- Solid State Drives Short BookDokument48 SeitenSolid State Drives Short BookGomathi Raja MNoch keine Bewertungen
- Diesel & Gas Turbine Power PlantDokument39 SeitenDiesel & Gas Turbine Power PlantvigneshgeminiNoch keine Bewertungen
- Design and Control of A Buck-Boost DC-DC Power ConverterDokument65 SeitenDesign and Control of A Buck-Boost DC-DC Power ConverterMurad Lansa Abdul Khader100% (1)
- Gummen PoolDokument29 SeitenGummen PoolvanithapremkumarNoch keine Bewertungen
- 1.single Phase AC To DC Fully Controlled Converter PDFDokument10 Seiten1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanNoch keine Bewertungen
- Solve Ex 2.0Dokument6 SeitenSolve Ex 2.0Omar Abd El-RaoufNoch keine Bewertungen
- Determination of Equivalent Circuit Parameters of Single Phase Induction MotorDokument6 SeitenDetermination of Equivalent Circuit Parameters of Single Phase Induction MotorReeta DuttaNoch keine Bewertungen
- Space Vector Pulse Width Modulation PDFDokument5 SeitenSpace Vector Pulse Width Modulation PDFnarendra kumarNoch keine Bewertungen
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Dokument7 SeitenSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNoch keine Bewertungen
- Lab 4 Half Wave and Full WaveDokument8 SeitenLab 4 Half Wave and Full WaveRashid Rind Rashid Rind100% (1)
- Application Note AN-6026: Design of Power Factor Correction Circuit Using FAN7529Dokument23 SeitenApplication Note AN-6026: Design of Power Factor Correction Circuit Using FAN7529miloud1911Noch keine Bewertungen
- Parallel Driving of Synchronous GeneratorDokument7 SeitenParallel Driving of Synchronous GeneratorMKIBETUNoch keine Bewertungen
- Lab 5 Report PDFDokument13 SeitenLab 5 Report PDFTamilinbaaNoch keine Bewertungen
- 012 - Chapter 2 - L10Dokument12 Seiten012 - Chapter 2 - L10nanduslns07Noch keine Bewertungen
- Ecuaciones para Curva de Conductores y MotoresDokument6 SeitenEcuaciones para Curva de Conductores y MotoresCarlos Lovera Rodriguez100% (1)
- DVM 1500 MDokument9 SeitenDVM 1500 MHanif Rathore PrinceNoch keine Bewertungen
- Psoc Important Questions 2019-20Dokument2 SeitenPsoc Important Questions 2019-20kpchakralaNoch keine Bewertungen
- Slup 129Dokument11 SeitenSlup 129Sameer NandanNoch keine Bewertungen
- The Silicon-Controlled Rectifier (SCR) - ThyristorsDokument12 SeitenThe Silicon-Controlled Rectifier (SCR) - ThyristorsKapila WijayaratneNoch keine Bewertungen
- Sepic Converter Based DC Motor Speed ControlDokument18 SeitenSepic Converter Based DC Motor Speed ControlCrispNoch keine Bewertungen
- Effect of Source Inductance On The Performance of AC To DC ConvertersDokument11 SeitenEffect of Source Inductance On The Performance of AC To DC Convertersmohammed aliNoch keine Bewertungen
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- Power Factor Correction in Zeta Converter Fed PMBLDCM Drive For An Air ConditionerDokument6 SeitenPower Factor Correction in Zeta Converter Fed PMBLDCM Drive For An Air ConditionertheijesNoch keine Bewertungen
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDokument6 SeitenImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNoch keine Bewertungen
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDokument18 SeitenCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNoch keine Bewertungen
- Operating System Compatibility For AutoCADDokument3 SeitenOperating System Compatibility For AutoCADXristos LianNoch keine Bewertungen
- Power Mosfet ExplanationDokument12 SeitenPower Mosfet ExplanationAntony RousosNoch keine Bewertungen
- An 799Dokument6 SeitenAn 799Xristos LianNoch keine Bewertungen
- AN1913 - 3-Phase BLDC Motor Control With Sensor Less Back-EMF ADC Zero Crossing Detection UsingDokument60 SeitenAN1913 - 3-Phase BLDC Motor Control With Sensor Less Back-EMF ADC Zero Crossing Detection UsingXristos LianNoch keine Bewertungen
- Making Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoDokument14 SeitenMaking Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoBiblioteca IICENoch keine Bewertungen
- Analysis of Mozarts k.475Dokument2 SeitenAnalysis of Mozarts k.475ASPASIA FRAGKOUNoch keine Bewertungen
- Skin Care Creams, Lotions and Gels For Cosmetic Use - SpecificationDokument33 SeitenSkin Care Creams, Lotions and Gels For Cosmetic Use - SpecificationJona Phie Montero NdtcnursingNoch keine Bewertungen
- Stadium and Club Tours - Senior Tour GuideDokument4 SeitenStadium and Club Tours - Senior Tour GuidebizmbuuNoch keine Bewertungen
- Ojt HRMDokument7 SeitenOjt HRMArlyn Joy NacinoNoch keine Bewertungen
- UTM Firewalls: AR3050S and AR4050SDokument8 SeitenUTM Firewalls: AR3050S and AR4050SChristian Javier Lopez DuranNoch keine Bewertungen
- Guide Rail Bracket AssemblyDokument1 SeiteGuide Rail Bracket AssemblyPrasanth VarrierNoch keine Bewertungen
- Veris Case StudyDokument2 SeitenVeris Case StudyPankaj GargNoch keine Bewertungen
- BCSS Sec Unit 1 Listening and Speaking SkillsDokument16 SeitenBCSS Sec Unit 1 Listening and Speaking Skillsjiny benNoch keine Bewertungen
- Computerised Project Management PDFDokument11 SeitenComputerised Project Management PDFsrishti deoli50% (2)
- Sample Heat Sheets June 2007Dokument63 SeitenSample Heat Sheets June 2007Nesuui MontejoNoch keine Bewertungen
- Role of Quick Response To Supply ChainDokument15 SeitenRole of Quick Response To Supply ChainSanuwar RashidNoch keine Bewertungen
- Nodal Mesh AnalysisDokument20 SeitenNodal Mesh Analysisjaspreet964Noch keine Bewertungen
- Comparison of Offline and Online Partial Discharge For Large Mot PDFDokument4 SeitenComparison of Offline and Online Partial Discharge For Large Mot PDFcubarturNoch keine Bewertungen
- Python PyDokument19 SeitenPython Pyakhilesh kr bhagatNoch keine Bewertungen
- Belimo ARB24-SR Datasheet En-UsDokument2 SeitenBelimo ARB24-SR Datasheet En-Usian_gushepiNoch keine Bewertungen
- BTL - 5000 SWT - Service Manual PDFDokument158 SeitenBTL - 5000 SWT - Service Manual PDFNuno Freitas BastosNoch keine Bewertungen
- Nanomedicine Lecture 2007Dokument59 SeitenNanomedicine Lecture 200778912071Noch keine Bewertungen
- RELATIVE CLAUSES 1º Bachillerato and KeyDokument3 SeitenRELATIVE CLAUSES 1º Bachillerato and Keyrapitanoroel0% (2)
- OD - SAP Connector UtilityDokument22 SeitenOD - SAP Connector UtilityShivani SharmaNoch keine Bewertungen
- Strategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniDokument24 SeitenStrategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniHilmyTafantoNoch keine Bewertungen
- Software Requirements SpecificationDokument9 SeitenSoftware Requirements SpecificationSu-kEm Tech LabNoch keine Bewertungen
- 面向2035的新材料强国战略研究 谢曼Dokument9 Seiten面向2035的新材料强国战略研究 谢曼hexuan wangNoch keine Bewertungen
- Filtomat M300Dokument4 SeitenFiltomat M300Sasa Jadrovski100% (1)
- What Is A Timer?Dokument12 SeitenWhat Is A Timer?Hemraj Singh Rautela100% (1)
- Ref Drawing 2. Ref Code: 3. Design DatasDokument3 SeitenRef Drawing 2. Ref Code: 3. Design DatasJoe Nadakkalan100% (3)
- Aruba 8325 Switch SeriesDokument51 SeitenAruba 8325 Switch SeriesgmtrlzNoch keine Bewertungen
- Anzsco SearchDokument6 SeitenAnzsco SearchytytNoch keine Bewertungen
- Updated PDPDokument540 SeitenUpdated PDPnikulaaaasNoch keine Bewertungen
- User Manual - Wellwash ACDokument99 SeitenUser Manual - Wellwash ACAlexandrNoch keine Bewertungen