Beruflich Dokumente
Kultur Dokumente
Cours 1
Hochgeladen von
Raed JebaliCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Cours 1
Hochgeladen von
Raed JebaliCopyright:
Verfügbare Formate
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Optimisation robuste pour la
programmation lin eaire
J.-P. Vial
ORDECSYS
Professeur honoraire, Universit e de Gen` eve
3-14 septembre 2007
Ecole d et e B enino-Br esilienne en Calcul des Variations et
Recherche Op erationnelle
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Cours 1
Incertitude dans des mod` eles
de programmation lin eaire
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Outline
1 Programmation lin eaire et incertitude
Probl ` emes statiques
Probl ` emes dynamiques
2 M ethodologies
Approche d eterministe
Approches probabilistes
Contrainte en proba.
Programmation stochastique
Programmation dynamique
3 Optimisation robuste
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Probl ` eme statique
Le probl ` eme statique canonique qui nous concerne a la
forme suivante :
max
x
n
j =1
c
j
x
j
(1)
n
j =1
a
ij
x
j
b
i
, i = 1, . . . , m
1
(2)
n
j =1
g
ij
x
j
= h
i
, i = m
1
+ 1, . . . , m
2
. (3)
Pour linstant on consid` ere quil ny a pas de composante
dynamique.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude (origine)
La version d eterministe de ce probl ` eme correspond au cas o` u
tous les param` etres du probl ` eme (c, a, b. g, h) sont connus avec
pr ecision au moment o` u lon xe la variable de d ecision x.
En pratique, les donn ees sont inconnues, ou mal connues, pour
les raisons suivantes
Param` etres estim es Certains param` etres sont estim es,
par exemple par une analyse statistique.
=Erreurs destimation
Param` etres mesur es Certains param` etres sont mesur es.
=Erreurs de mesure
Param` etres r ev el es a posteriori Certains param` etres
(e.g., demande, prix, etc.) ne sont r ev el es quapr ` es avoir x e
les variables de d ecision. =Erreurs de pr evision
Mise en uvre Mettre en uvre une solution x ne peut se
faire quavec une pr ecision limit ee.
=Erreurs de r ealisation
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude (impact)
Le processus de mise en uvre est en deux temps.
1 D ecider. Fixer la valeur de la variable x.
2 Observer. Observer les valeurs r ealis ees des
param` etres a, b, c, etc. Ensuite,
Calculer la fonction objectif ;
v erier si les contraintes sont satisfaites.
Difcult e
La d ecision choisie x doit satisfaire les contraintes dans
tous les cas de gure (pour toutes les r ealisations
possibles).
La d ecision choisie x doit assurer en moyenne une
bonne performance economique (crit ` ere desp erance
math ematique dutilit e).
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Probl ` eme dynamique
Commande optimale
min
T
t =1
(c
T
t
x
t
+ d
T
t
u
t
)
x
t
= A
t
x
t 1
+ B
t
u
t 1
+ C
t
, t = 2, . . . T (4)
G
t
u
t
h
t
, t = 1, . . . T (5)
x
1
=
x
1
.
La variable u
t
est appel ee commande ; elle est contrainte par (5). La
variable x
t
est appel ee etat ; elle est enti ` erement d etermin ee par les
commandes et par l equation de la dynamique (4).
Les contraintes (5) du mod` ele peuvent etre plus complexes. Elles
peuvent porter sur les etats x
t
et/ou sur plusieurs commandes u
t
` a la fois.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude (origine et nature)
Origine de lincertitude
Les m emes que dans le cas statique. Elles engendrent des
erreurs destimation, de mesure, de pr evision et de
r ealisation.
Nature de lincertitude
Lincertitude prend la forme dun processus stochastique
dont les r ealisations dans le temps sont progressivement
r ev el ees au d ecideur.
A la date t , le d ecideur connat toute lhistoire
du (des) processus de = 1 jusqu ` a = t 1.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude (impact)
Le processus de mise en uvre est en plusieurs etapes.
[decision]
1
[chance]
1
. . . [decision]
t
[chance]
t
. . . .
1 Etape 1
D ecider. Fixer la valeur de la variable u
1
.
Puis observer. Observer les valeurs r ealis ees des
param` etres A
1
, B
1
, C
1
, etc. La valeur de x
2
peut alors alors
d etermin ee.
2 Etape 2
D ecider. Fixer la valeur de la variable u
2
.
Puis observer. Observer les valeurs r ealis ees des
param` etres A
2
, B
2
, C
2
, etc. La valeur de x
3
peut alors
d etermin ee.
3 Etape 3 . . .
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Difcult es du mod` ele multi- etapes
Comme dans le mod` ele statique, les d ecisions doivent etre prises
avant que les param` etres incertains ne soient connus. Une
d ecision doit donc etre prise sachant que ses cons equences
possibles (objectif et contraintes) sont multiples et ind etermin ees.
Pour quune d ecision u
t
en t soient bonne il faut quelle prenne
en compte les r ealisations pass ees en = 1, . . . , t 1. En = 1
les d ecisions en = 2, . . . , T doivent etre vues comme des
fonctions de param` etres incertains. Les d ecisions futures sont donc
incertaines !
Pour choisir une bonne d ecision en = t , il faut donc anticiper le
type de d ecisions incertaines quon prendra en = t + 1, . . . , T.
La dynamique introduit une complexit e dun ordre redoutable
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Outline
1 Programmation lin eaire et incertitude
Probl ` emes statiques
Probl ` emes dynamiques
2 M ethodologies
Approche d eterministe
Approches probabilistes
Contrainte en proba.
Programmation stochastique
Programmation dynamique
3 Optimisation robuste
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Quelques approches
Hypoth` ese
Les d ecisions (x dans le mod` ele statique ; u
t
dans le
mod` ele dynamique) nont pas dimpact sur les param` etres
incertains.
M ethodes
1 Approche d eterministe (par valeur moyenne ou
nominale).
2 Approches probabilistes
Programmation stochastique par arbre d ev enements ;
Satisfaction de contrainte en probabilit e.
3 Programmation dynamique (pour le cas multi- etapes)
4 Programmation robuste.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Approche d eteministe par valeurs
nominales
Si les perturbations sur les param` etres sont petites ( ! ?) on peut penser
remplacer les param` etres incertains par leur valeur nominale et r esoudre
le probl ` eme d eterministe correspondant. La solution obtenue est appel ee
nominale.
La solution nominale est-elle r ealisable ?
Y a-t-il violation des contraintes et dans quelles proportions ?
Performance sur la collection NETLIB
NETLIB est une collection dune centaine de probl ` emes lin eaires de
tailles petites ou moyennes (du point de vue des standards actuels !)
correspondant pour la plupart ` a des probl ` emes r eels. La collection
NETLIB a longtemps servi de banc dessai pour comparer divers
algorithmes (Simplex et Points Int erieurs).
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude sur les donn ees dans NETLIB
Exemple de contrainte dans le probl ` eme PILOT4 (contrainte 372) :
La solution optimale donn ee par CPLEX 6.0
La solution v erie la contrainte au niveau maximal de pr ecision de la
machine.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Incertitude sur les donn ees dans NETLIB
Coefcients
Douteux Le coefcient de la variable x
859
est 122.163055. Pour des
donn ees mesur ees ou estim ees, 9 chiffres signicatifs
repr esentent une pr ecision g en eralement inaccessible. On peut
supposer que la valeur du coefcient r esulte en fait dun calcul
num erique (division entre deux chiffres, evaluation dune
fonction non-lin eaire dun param` etre) quon na pas voulu
arrondir.
Fable Le coefcient de la variable x
880
est 1. On peut penser quil est
le reet dune structure et quil est donc exact (par exemple,
lorsquil sagit dune equation de conservation de masse).
Hypoth` ese de travail
Tous les coefcients douteux ont pour origine une relation
technologique. A ce titre ils peuvent tr ` es difcilement connus avec
pr ecision. Trois ` a quatre chiffres signicatifs est ce quon peut esp erer de
mieux.
Etude effectu ee par Ben-Tal et Nemirovski.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Impact dune incertitude de = 0.1% sur la
contrainte 372
Les donn ees r eelles
a peuvent se trouver dans lintervalle [a(1 ), a(1 + )]. La
violation relative de la contrainte 372 est evalu ee ` a la solution nominale x
par la
formule
V =
max[b
a
T
x
, 0]
b
100%.
R esultats
Le pire des cas conduit ` a une violation de 450 %!
Si les coefcients
a
i
sont consid er es comme statistiquement ind ependants
avec une plage de variation de 0.1% les r esultats sont moins
catastrophiques, mais tout de m eme inacceptables.
Prob{V > 0} Prob{V > 150%} Moyenne(V)
0.50 0.18 125 %
R esultats obtenus sur 1000 tirages al eatoires avec des distributions
uniformes ind ependantes pour chaque
a
i
.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Etude exhaustive avec = 0.01%, 0.1%, 1%
1 On r esout le probl ` eme et on obtient la solution x
2 Pour chaque contrainte din egalit e a
T
x b
on partitionne les coefcients a
i
en certains (coefcients ecrits
comme des fractions rationnelles p/q avec |q| 100 ) et
incertains. J est lensemble des indices des coefcients incertains.
Lindice de abilit e de x
pour la contrainte est
max{(a
T
x
+
_
j J
(a
j
x
j
)
2
) b, 0}
max[1, |b|]]
Cet indice mesure la violation ` a laquelle on peut sattendre si les
perturbations sur les coefcients sont ind ependantes.
3 La solution x
est dite non able et le probl ` eme est dit mauvais au niveau
de perturbation si le plus grand des indices de abilit e sur lensemble des
contraintes exc` ede 5%.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
R esultat de l etude de cas
Sur 90 probl ` emes de la collection :
1 27 probl ` emes ont une solution nominale non able au
niveau de perturbation 1%;
2 parmi ces 27 probl ` emes, 19 sont mauvais au niveau
dincertitude 0.01%
3 13 de ces 19 probl ` emes, une perturbation = 0.01%
peut entraner une violation de plus de 50% pour
certaines contraintes.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Conclusions sur lapproche d eterministe
Lorsquon utilise la programmation lin eaire pour
r esoudre des probl ` emes r eels on ne peut pas faire du
risque que de petites perturbations sur des donn ees
incertaines rendent la solution nominale inexploitable.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
2. Approche probabiliste
Hypoth` eses
1 Il existe un mod` ele probabiliste able des donn ees
incertaines, ainsi quue technique op erationnelle pour
estimer les param` etres des distributions,
2 Il existe des techniques num eriques efcaces pour
calculer, ` a partir de ces distributions, des probabilit es et
des esp erances math ematiques.
On peut penser ` a deux approches :
1 la r esolution du probl ` eme stochastique avec une borne
sur la probabilit e de satisfaction des contraintes ;
2 la programmation stochastique par arbre
d ev enements.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Probl ` eme canonique
Le probl ` eme statique canonique peut se r e ecrire en traitant
lobjectif comme une contrainte
max
x
z
z
n
j =1
c
j
x
j
0 (6)
n
j =1
a
ij
x
j
b
i
, i = 1, . . . , m
1
(7)
n
j =1
g
ij
x
j
= h
i
, i = m
1
+ 1, . . . , m
2
. (8)
On suppose que les coefcients g et h sont d eterministes, mais
que les coefcients a, b et c sont des variables al eatoires.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Satisfaction de contrainte en probabilit e
Prenons le cas de la contrainte a
T
x b. Etant donn ee une
solution propos ee x
on se pose la question :
Quelle est la probabilit e que la contrainte a
T
x
b soit satis-
faite ?
niveau de satisfaction = Prob(a
T
x
b).
Contrainte sur le niveau de satisfaction : ensemble des x tels que
Prob(a
T
x b) 1
o` u > 0 repr esente le risque tol er e de violation de contrainte.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Repr esentation dune contrainte en
probabilit e
Consid erons lin egalit e simple
a
1
x
1
+ a
2
x
2
b
o` u les param` etres a
1
et a
2
sont incertains. On suppose
connue la distribution de probabilit e de ces param` etres. On
se propose de traiter deux cas simples,
distribution normale
distribution uniforme.
Dans lexemple, le coefcient b sera xe.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Cas dune loi normale
On exprime les param` etres incertains par
a
i
(
) =
i
+
i
i
, i = 1, 2
o` u
1
et
2
repr esentent deux variables al eatoires ind ependantes suivant
chacune une loi normale centr ee r eduite (E(
i
) = 0 et E(
2
i
) = 1). Les
param` etres
i
et
i
sont les deux premiers moments de la distribution
des a
i
(
).
La combinaison lin eaire
y = a
1
(
1
)x
1
+ a
2
(
2
)x
2
=
1
x
1
+
2
x
2
+ (
1
x
1
)
1
+ (
2
x
2
)
2
est une variable al eatoire qui suit une loi normale avec
moyenne =
1
x
1
+
2
x
2
ecart-type =
_
2
1
x
2
1
+
2
2
x
2
2
.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Equivalent d eterministe (loi normale)
Soit
k
=
1
(1 ),
o` u est la loi de distribution de la loi normale centr ee r eduite. La
condition
1
x
1
+
2
x
2
+ k
2
1
x
2
1
+
2
2
x
2
2
b (9)
est l equivalent d eterministe de la contrainte en probabilit e
Prob(a
T
x b) 1 .
Cette contrainte nest pas r eductible ` a une contrainte quadratique, mais
elle est convexe. Elle peut se ramener ` a la contrainte type :
_
n
i =1
z
2
i
z
n+1
(avec z
i
=
i
x
i
, i = 1, 2 et z
3
= b (
1
x
1
+
2
x
2
)).
Un probl ` eme avec des contraintes coniques quadratiques se r esout ` a
peu pr ` es aussi facilement quun probl ` eme de programmation lin eaire ` a
laide dune m ethode de points int erieurs.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Cas dune loi uniforme
Consid erons maintenant le cas apparemment plus simple o` u les
param` etres suivent chacun une loi uniforme sur lintervalle
[a
n
i
a
v
i
, a
n
i
+ a
v
i
], i = 1, 2. Les param` etres a
n
i
sont les valeurs nominales
alors que les a
v
i
donnent lamplitude des variations possibles. Si
1
et
2
sont deux variables al eatoires ind ependantes de loi uniforme U sur
[1, 1], on peut ecrire
a
i
= a
n
i
+ a
v
i
i
, i = 1, 2.
On obtient la contrainte en probabilit e
Prob
_
|
2
i =1
(a
v
i
x
i
)
i
b
2
i =1
a
n
i
x
i
_
1 .
La probabilit e peut se calculer par une int egrale double sur un carr e.
Cest chose facile pour un x donn e, mais il faut distinguer plusieurs cas,
ce qui ne permet pas de caract eriser le domaine d eni par la contrainte
en probabilit e comme une contrainte fonctionnelle classique g(x) 0, o` u
g(x) serait une fonction donn ee sous forme explicite.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Exemple num erique
On choisit b = 1, a
n
i
= 1 et a
v
i
= 1.5, i = 1, 2.
Cas 1
On suppose que x sature la contrainte nominale x
1
+ x
2
= 1. La
probabilit e de satisfaction de la contrainte est
Prob(1.5x
1
1
+ 1.5x
2
2
1 (x
1
+ x
2
)) = Prob(x
1
1
+ x
2
2
0).
2
(x
1
, x
2
)
On consid` ere la solution nominale
x
1
= 0.6, x
1
= 0.4. On v erie
Prob(0.6
1
+ 0.4
2
0) = 0.5.
M eme pour toute solution nominale
x
1
+ x
2
= 1.
Conclusion : le long de la droite x
1
+ x
2
= 1, la probabilit e de satisfaction
de la contrainte vaut 1.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Exemple num erique (suite)
Cas 2
On cherche maintenant lensemble des x pour les quels la contrainte est
satisfaite avec probabilit e 1. Il faut donc rechercher le pire cas pour la
contrainte
2
i =1
(a
v
i
x
i
)
i
b. Cela correspond au maximum atteignable
par le membre de gauche dans le domaine de variation des . Cette
valeur est donn ee par
2
i =1
(a
n
i
x
i
+ |a
v
i
x
i
|) . Cela donne la condition
2
i =1
_
a
n
i
x
i
+ |a
v
i
x
i
|
_
b.
Cest equivalent ` a
(a
n
1
+ a
v
1
)x
1
+ (a
n
2
+ a
v
2
)x
2
b
(a
n
1
a
v
1
)x
1
+ (a
n
2
+ a
v
2
)x
2
b
(a
n
1
+ a
v
1
)x
1
+ (a
n
2
a
v
2
)x
2
b
(a
n
1
a
v
1
)x
1
+ (a
n
2
a
v
2
)x
2
b.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Exemple num erique (suite)
Pour visualiser le domaine des x assurant un niveau de satisfaction de la
contrainte de 1 , on a r ealis e le diagramme suivant
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Exemple num erique (suite)
Cas 3 Pour visualiser le domaine des x assurant un niveau de
satisfaction de la contrainte de 1 , on a r ealis e le diagramme suivant
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Exemple num erique (n)
Ensemble des solutions r ealisables pour la contrainte
simple
Lensemble des points r ealisables pour une probabilit e de
satisfaction de la contrainte de 1 est
= 0.5 : un demi-espace ;
= 0 : un poly` edre ;
0 < < 0.5 : un ensemble convexe non-lin eaire,
difcile ` a caract eriser par une fonction num erique
simple.
> 0.5 ; un ensemble non-convexe.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Conclusions sur lapproche par satisfaction
en probabilit e des contraintes
Conclusions
Lapproche probabiliste repose sur un mod` ele
probabiliste des param` etres incertains. Dans le cas
dune incertitude multidimensionnelle, lidentication
dun mod` ele probabiliste et lestimation des param` etres
du mod` ele peut etre extr emement difcile.
A part le cas dune loi normale pour les param` etres,
lapproche par satisfaction en probabilit e des
contraintes est difcile ` a exploiter.
M eme dans le cas simple dune distribution uniforme,
lensemble r ealisable est complexe.
Dans le cas g en eral, lensemble r ealisable peut etre
non-convexe. On se heurte ` a des difcult es
num eriques qui peuvent etre insurmontables.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Programmation stochastique
Hypoth` eses
Les coefcients incertains d ependent de facon connue
dune variable al eatoire qui suit une loi discr ` ete, elle
aussi connue.
Les d ecisions ninuent pas la distribution de
probabilit e.
Les contraintes du probl ` eme doivent etre v eri ees avec
probabilit e 1.
Le crit ` ere de performance pour lobjectif (dont la valeur
peut d ependre des r ealisations de ) est lesp erance
math ematique.
Lhypoth` ese dune distribution discr ` ete nest introduite que pour simplier
la pr esentation.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Arbre d ev enements
Probl ` eme statique Probl ` eme dynamique
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Formulation dun probl ` eme statique
Lensemble des valeurs possibles pour lal ea sous-jacent est
1
,
2
, . . . ,
N
avec probabilit es
1
,
2
, . . . ,
N
.
Le probl ` eme de programmation stochastique se formule
max
x
N
k=1
k
n
j =1
c
j
(
k
)x
j
n
j =1
a
ij
(
k
)x
j
b
i
(
k
), i = 1, . . . , m
1
, k = 1, . . . , N
n
j =1
g
ij
(
k
)x
j
= h
i
(
k
), i = m
1
+ 1, . . . , m
2
, k = 1, . . . , N.
Notez la diff erence de traitement entre lobjectif et les contraintes.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
D es (cas statique)
D es
Comment g en erer automatiquement ` a partir du probl ` eme
d eterministe toutes les el ements du probl ` eme stochastique ?
Le nombre des contraintes est multipli e par N, ainsi que le
nombre de termes dans lobjectif. Quel est limpact sur les
temps de calcul ?
Comment identier ou g en erer les ev enements el ementaires
k
et leur probabilit e
k
? Si la distribution de est continue,
comment discr etiser pour rester dans le cadre de la
programmation lin eaire ?
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
El ements de r eponse (cas statique)
El ements de r eponse
Il existe des outils logiciels pour g en erer le probl ` eme
stochastique.
Laccroissement de taille du probl ` eme est proportionnel ` a N.
Comme on reste dans le cadre de la programmation lin eaire,
les probl ` emes restent traitables. (A comparer avec le cas
de la satisfaction des contraintes en probabilit e.)
La construction des al eas de base (
1
, . . . ,
N
) peut se faire ` a
partir de la discr etisation dune loi de distribution ou par
tirages al eatoires (Monte-Carlo). On d emontre que le
nombre dal eas n ecessaires N pour garantir que las solution
du programme stochastique a une pr ecision donn ee assure
une complexit e polynomiale.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Formulation dun probl ` eme dynamique
Dans un probl ` eme dynamique linformation est r ev el ee progressivement.
Cela se traduit par la structure arborescente de la repr esentation des
ev enements.
La formulation doit tenir compte que lorsque le d ecideur xe la valeur
dune variable x
t
(index ee par le temps) le choix se fait avec la
connaissance des ev enements pass es, cest- ` a-dire de la position sur
larbre. Les variables doivent donc etre index ees par le nud de larbre
auquel elle se rapporte.
La formulation se fait ` a partir
1 Du mod` ele d eterministe dynamique avec ses donn ees pour un
sc enario de r ef erence.
2 Des informations sur le processus stochastique : arbre
d ev enements, probabilit es et valeurs prises par les param` etres sur
larbre.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Illustration (Donn ees)
Mod` ele math ematique d eterministe.
min (x
2
x
2
)
2
x
t
= x
t 1
+ u
t 1
t
, t = 1, 2,
0 u
t
b
t
, t = 0, 1,
x
0
=
x
0
.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Ecriture avec AMPL
Mod` ele math ematique d eterministe.
param T; # number of periods (time horizon)
set TIME := 0..T;
set TIME1 := 0..T-1;
set TIME2 := 1..T;
set TIME3 := {T} ;
set TIME4 := {0} ;
param x0 >= 0; # initial state
param xTobj >= 0; # objective for the state
param b {TIME1} >= 0; # bound for the control at each period
param xi{TIME2} ; # perturbation
var x {TIME} >= 0; # state of the system at each period
var u {TIME1} >= 0; # control for each period
# Objective function
minimize slack : sum{t in TIME3} (x[t] - xTobj)
*
(x[t] -
xTobj);
# System dynamics
subject to timedynamics t in TIME2 : x[t] = x[t-1] + u[t-1]
- xi[t];
# Bound for the control variable
subject to timebound t in TIME1 : u[t] <= b[t];
# Initial state of the system
subject to initial t in TIME4 : x[t] = x0;
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Ecriture avec AMPL
Donn ees pour le mod` ele d eterministe.
param T := 2; # number of periods (time horizon)
param x0 := 0; # initial state
param xTobj := 10; # objective for the state
param b := 0 10 1 10; # bound for the control at each period
param xi := 1 8 2 12; # perturbation
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
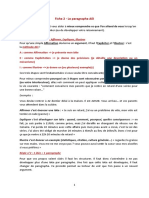
Arbre d ev enements
Q
Q
Q
Q
Q
H
L
H
L
H
L
P
P
P
P
P
P
P
P
P
P
P
P
Scenario
1
2
HH 8 12 0.36
HL 8 10 0.24
LH 6 10 0.24
LL 6 8 0.16
FIG.: Arbre d ev enements
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Description formelle de larbre
4
3
2
1
1
2
1
t = 0 t = 1 t = 2
Les nuds sont rep er es par deux indices : date
t et leur position en t . Ainsi le nud en haut ` a
droite est (2, 4)
Larbre peut etre d ecrit par une relation de
parent e : le parent de (2, 4) est (1, 2)
La relation de parent e sexprime par une fonction
a(t , n) : par exemple 2 = a(2, 4). Cette fonction
d ecrit enti ` erement larbre.
On doit aussi avoir les probabilit es P
t ,n
en cha-
cun des nuds et les valeurs des param` etres
incertains en ces nuds.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Formulation du probl ` eme stochastique
min
nS
2
P
2,n
(x
2,n
x
2
)
2
s.t. x
t ,n
= x
t 1,a(t ,n,1)
+ u
t 1,a(t ,n,1)
t ,n
, t = 1, 2, n S
t
,
0 u
t ,n
b
t
, t = 0, 1, n S
t
,
x
0,1
=
x
0
.
S
t
est lensemble des nuds en t :
S
2
= {1, 2, 3, 4}
S
1
= {1, 2}
S
2
= {1}
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Entr ee des donn ees stochastiques
Dans lapproche pr esent ee, lutilisateur doit fournir les informations
essentielles sur larbre : la num erotation des nuds, la fonction de
parent e, les probabilit es. Cest un tr ` es gros travail d` es que le probl ` eme
est assez grand.
En pratique, il faut que lutilisateur puisse rentrer les donn ees sous une
forme plus simple. Le format le plus populaire est celui des sc enarios.
Dans la formulation par sc enarios, le mod elisateur b atit une liste de
sc enarios, commencant pas un sc enario de base. Lorsque le
mod elisateur introduit un nouveau sc enario, il indique
auquel des sc enarios de la liste il se raccorde ;
` a quelle date il se raccroche ` a son sc enario parent ;
quelles sont les valeurs prises par les param` etres stochastiques le
long de ce nouveau sc enario.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
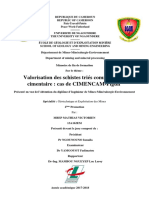
Repr esentation par sc enarios
t = 0 t = 1 t = T = 2
0 1
1 1
0 1
1 3
1
a
a
a
a
a
2
@
@
@
@
@
3
a
a
a
a
a
4
S[0] S[1] S[2] = = = {1} {1, 3} {1, 2, 3, 4}
A partir de larbre on peu construire les fonctions et pour les
sc enarios
1
= (1, 1, 1),
2
= (1, 1, 2),
3
= (1, 3, 3),
4
= (1, 3, 4). Et
r eciproquement
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Information fournies par le mod elisateur
Exemple de donn ees de sc enarios dans le langage AMPL
# data concerning the scenarios
set Scen := hh hl ll lh;
param :meet parent scenprob :=
hh 0 root .36
hl 1 hh .24
ll 0 root .16
lh 1 ll .24;
# # data concerning the stochastic process
param xi : hh hl ll lh :=
1 8 . 6 .
2 12 10 8 10;
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Loutil DET2STO
Loutil DET2STO est un script qui g en` ere dans le langage
AMPL le probl ` eme stochastique ` a partir
de la formulation en AMPL du mod` ele dynamique
d eterministe,
des donn ees d eterministes,
des donn ees sur les sc enarios.
Loutil est disponible sur la page
http ://www.ordecsys.com/det2sto/
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Fichier produit par DET2STO
# PARAMETERS.
param T;
set TIME := 0..T;
set TIME1 := 0..T-1;
set TIME2 := 1..T;
set TIME3 := {T};
set TIME4 := {0};
#
# PROBABILISTIC SECTION OF THE MODEL
# insert here the formulas to compute the functions relative
# to the event tree (Set of nodes, k-ancestor function, etc.)
# See next sections.
#
param x0 >= 0;
param xTobj >= 0;
param b TIME1 >= 0;
param xit in TIME2,n in NodeSet[t];
# VARIABLES.
var x t in TIME, n in NodeSet[t]>= 0;
var u t in TIME1,n in NodeSet[t]>= 0;
# OBJECTIVE FUNCTION.
minimize slack : sumt in TIME3,n in NodeSet[t] nodeprob[t,n]
*
((x[t,n] -
xTobj)
*
((x[t,n] - xTobj));
# CONSTRAINTS.
subject to timedynamics t in TIME2, n in NodeSet[t] :
x[t,n] = x[t-1,kancest[t,n,1]] + u[t-1,kancest[t,n,1]] - xi[t,n];
subject to timebound t in TIME1, n in NodeSet[t] : u[t,n] <= b[t];
subject to initial t in TIME4, n in NodeSet[t] : x[t,n] = x0;
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Evaluation
Conclusions
Lapproche par programmation stochastique repose sur la
repr esentation du processus par un arbre d ev enements.
La cr eation dun arbre d ev enements dans un probl ` emes
multi- etapes est une difcult e majeure. La taille crot de facon
exponentielle avec le nombre d etapes.
Il est existe des outils commerciaux ou en open source qui
facilitent la formulation, la r esolution et linterpr etation des r esultats.
Des r esultats r ecents ont etabli que
pour les probl ` emes statiques et ` a 2 p eriodes il est possible,
sous des hypoth` eses faibles, d etablir des r esultats de
complexit e (analogues ` a ceux de la programmation convexe).
pour les probl ` emes ` a plus de deux etapes : Multi-stage
problems, even linear with complete recourse, generically are
computationally intractable already when medium-accuracy
solutions are sought. (Nemirovski & Shapiro, 2004)
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Programmation dynamique
Cit ee pour m emoire.
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Outline
1 Programmation lin eaire et incertitude
Probl ` emes statiques
Probl ` emes dynamiques
2 M ethodologies
Approche d eterministe
Approches probabilistes
Contrainte en proba.
Programmation stochastique
Programmation dynamique
3 Optimisation robuste
Optim.
Robuste
J.-P. Vial
Prog. Lin.
Statique
Dynamique
M ethodes
d eterministe
Probabiliste
Contrainte en
proba.
Programmation
stochastique
Prog. Dynamique
Robuste
Optimisation robuste
Objet des prochains cours.
Das könnte Ihnen auch gefallen
- Fiche - P.écrite Le FanatismeDokument1 SeiteFiche - P.écrite Le FanatismeyoussefNoch keine Bewertungen
- Polymere Etat SolideDokument20 SeitenPolymere Etat SolideWassim DammakNoch keine Bewertungen
- 1 PBDokument25 Seiten1 PBKhalid EzzaheryNoch keine Bewertungen
- NominalisationDokument2 SeitenNominalisationMed izdarNoch keine Bewertungen
- Algèbre de Boole Et Circuits LogiquesDokument46 SeitenAlgèbre de Boole Et Circuits LogiquesCharafeddine ELBAHJANoch keine Bewertungen
- Le Paragraphe AEIDokument3 SeitenLe Paragraphe AEIThe Kill Yass ヤスNoch keine Bewertungen
- Memoire SammerDokument74 SeitenMemoire Sammermathias victorien mbep100% (2)
- MMC TD1 EstemDokument1 SeiteMMC TD1 Estemmehdi HEDDAJNoch keine Bewertungen
- Le Questionnaire D - Enquete1Dokument19 SeitenLe Questionnaire D - Enquete1LukubamaNoch keine Bewertungen
- ArgumentationDokument5 SeitenArgumentationOum ZaydNoch keine Bewertungen
- Gestion Et Contrôle de Projets de ConstructionDokument248 SeitenGestion Et Contrôle de Projets de ConstructionAbdellatif ALAHYANENoch keine Bewertungen
- DELATTRE JoelleDokument14 SeitenDELATTRE JoelleFady ABDELNOURNoch keine Bewertungen
- Co VadisDokument25 SeitenCo VadisZineb ZGnNoch keine Bewertungen
- Paa ToucheDokument53 SeitenPaa ToucheNABIL100% (2)
- UntitledDokument612 SeitenUntitledYerk Man100% (1)
- Amplificateur D'énergieDokument1 SeiteAmplificateur D'énergieCarole PiraNoch keine Bewertungen
- TD2 ElectroDokument3 SeitenTD2 Electrorgaibi mohammedNoch keine Bewertungen
- Comment Trouver Votre Bonheur InterieurDokument58 SeitenComment Trouver Votre Bonheur InterieurHawa SyNoch keine Bewertungen
- Loi Eau 2006Dokument53 SeitenLoi Eau 2006rvanNoch keine Bewertungen
- Méthodes de Maintenance: Chapitre 2Dokument138 SeitenMéthodes de Maintenance: Chapitre 2ali nordNoch keine Bewertungen
- Leadership Incarné, 5 Leçons de Leadership de La Vie de Jésus - Robinson, WilliamDokument114 SeitenLeadership Incarné, 5 Leçons de Leadership de La Vie de Jésus - Robinson, WilliamRouah Eagle JeroiNoch keine Bewertungen
- Inbound 5331790911052016794Dokument2 SeitenInbound 5331790911052016794Rokia MouloudNoch keine Bewertungen
- 2007-2008 Corrige Examen Session PrincipaleDokument2 Seiten2007-2008 Corrige Examen Session PrincipalesumaleeNoch keine Bewertungen
- Colle PolynomesDokument4 SeitenColle Polynomesabdellahmor100% (1)
- Stage 2020Dokument31 SeitenStage 2020Semi Zoghlami100% (1)
- Introduction Du Rapport de StageDokument18 SeitenIntroduction Du Rapport de StageSteeve RyanNoch keine Bewertungen
- Comment Prendre Une Décision RapideDokument1 SeiteComment Prendre Une Décision RapideAbdoul Wahab Ahmed KaneNoch keine Bewertungen
- TC Maths Leçon 04 Derivabilite Et Etude de FonctionsDokument24 SeitenTC Maths Leçon 04 Derivabilite Et Etude de FonctionsMinsinmo yaya FofanaNoch keine Bewertungen
- Champ Mag FORCE L. L. INDUCT CIRCUIDokument14 SeitenChamp Mag FORCE L. L. INDUCT CIRCUImk_garba_dmNoch keine Bewertungen
- Algerie Decret 2018 202 Attribution Permis MiniersDokument24 SeitenAlgerie Decret 2018 202 Attribution Permis MiniersFarid AkifNoch keine Bewertungen