Das könnte Ihnen auch gefallen
- MEMS and Microsystems Design Chapter on Engineering MechanicsDokument71 SeitenMEMS and Microsystems Design Chapter on Engineering MechanicsYatish Kumar Singh100% (1)
- 8086 Full PageDokument1 Seite8086 Full Pagesajs201Noch keine Bewertungen
- New Text DocumNoDokument1 SeiteNew Text DocumNosajs201Noch keine Bewertungen
- Microprocessor and Microcontroller Exam QuestionsDokument3 SeitenMicroprocessor and Microcontroller Exam Questionssajs201Noch keine Bewertungen
- 12E602 Embedded SystemsDokument3 Seiten12E602 Embedded Systemssajs201Noch keine Bewertungen
- Higher Algebra - Hall & KnightDokument593 SeitenHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- MVI C-InstrucionDokument1 SeiteMVI C-Instrucionsajs201Noch keine Bewertungen
- 8085 ArchitectureDokument1 Seite8085 Architecturesajs201Noch keine Bewertungen
- A Fuzzy IRFOC Application Based Speed Sensor Less Control of IM Using A Speed and Load Torque ObserverDokument6 SeitenA Fuzzy IRFOC Application Based Speed Sensor Less Control of IM Using A Speed and Load Torque Observersajs201Noch keine Bewertungen
- Scaling Laws in Miniaturization: Lectures On MEMS and Microsystems Design and ManufactureDokument22 SeitenScaling Laws in Miniaturization: Lectures On MEMS and Microsystems Design and ManufactureDharshan Kofi100% (1)
- SBI Recruitment for IT Specialist OfficersDokument3 SeitenSBI Recruitment for IT Specialist Officerssajs201Noch keine Bewertungen
- Stepper Motor FundamentalsDokument8 SeitenStepper Motor Fundamentalssajs201Noch keine Bewertungen
- Torque Sensor Less Control of IMDokument6 SeitenTorque Sensor Less Control of IMsajs201100% (1)
- Sensor Less Control of IM by Reduced Order Observer With MCA EXIN & Based Adaptive Speed EstimationDokument17 SeitenSensor Less Control of IM by Reduced Order Observer With MCA EXIN & Based Adaptive Speed Estimationsajs201Noch keine Bewertungen
- Speed Sensor Less Control of IM Using The Extended Kalman FilterDokument5 SeitenSpeed Sensor Less Control of IM Using The Extended Kalman Filtersajs201Noch keine Bewertungen
- Speed Sensor Less Control of IM Using Sliding Mode Observer With Variable Boundary LayerDokument5 SeitenSpeed Sensor Less Control of IM Using Sliding Mode Observer With Variable Boundary Layersajs201100% (1)
- Voltage Vector Controller For Rotor Field-Oriented Control of IM Based On Motional Electromotive ForceDokument4 SeitenVoltage Vector Controller For Rotor Field-Oriented Control of IM Based On Motional Electromotive Forcesajs201Noch keine Bewertungen
- The Simulation Study of Sensor Less Control For IM Drives Based On MRASDokument5 SeitenThe Simulation Study of Sensor Less Control For IM Drives Based On MRASsajs201100% (1)
- Instantaneous Speed and Disturbance Torque Observer Using Non Linearity Cancellation of Shaft EncoderDokument6 SeitenInstantaneous Speed and Disturbance Torque Observer Using Non Linearity Cancellation of Shaft Encodersajs201Noch keine Bewertungen
- Robust Sensor Less Control For IM Drives Fed by A Matrix Converter With Variable Structure Model Reference AdaptiveDokument5 SeitenRobust Sensor Less Control For IM Drives Fed by A Matrix Converter With Variable Structure Model Reference Adaptivesajs201Noch keine Bewertungen
- Robust Speed-Controlled IM Drive Using EKF and RLS EstimatorsDokument7 SeitenRobust Speed-Controlled IM Drive Using EKF and RLS Estimatorssajs201100% (1)
- Sensor Less Control of Ac Drives Equipped With An Inverter Output FilterDokument68 SeitenSensor Less Control of Ac Drives Equipped With An Inverter Output Filtersajs201100% (3)
- SVPWM Speed Governing System of IM Based On DSPDokument5 SeitenSVPWM Speed Governing System of IM Based On DSPsajs201Noch keine Bewertungen
- Observer Based Position and Speed Estimation of Interior Permanent Magnet MotorDokument5 SeitenObserver Based Position and Speed Estimation of Interior Permanent Magnet Motorsajs201100% (1)
- Experimental Evaluation of Braided EKF For Sensor Less Control of IMDokument13 SeitenExperimental Evaluation of Braided EKF For Sensor Less Control of IMsajs201Noch keine Bewertungen
- A Novel Speed Sensor Less Field-Oriented Control Scheme of IM Using Extended Kalman Filter With Load Torque ObserverDokument7 SeitenA Novel Speed Sensor Less Field-Oriented Control Scheme of IM Using Extended Kalman Filter With Load Torque Observersajs201Noch keine Bewertungen
- Decoupled EKF For Simultaneous Target Model and Relative Pose Estimation Using Feature PointsDokument6 SeitenDecoupled EKF For Simultaneous Target Model and Relative Pose Estimation Using Feature Pointssajs201Noch keine Bewertungen
- Speed Sensor Less Field-Oriented Control of IM With Interconnected Observers Experimental Tests On Low Frequencies BenchmarkDokument12 SeitenSpeed Sensor Less Field-Oriented Control of IM With Interconnected Observers Experimental Tests On Low Frequencies Benchmarksajs201Noch keine Bewertungen
- Space-Vector PWM Inverter Feeding A Small IMDokument4 SeitenSpace-Vector PWM Inverter Feeding A Small IMsajs201100% (5)
- Speed and Stator Resistance Identification Schemes For A Low Speed Sensor Less IM DriveDokument7 SeitenSpeed and Stator Resistance Identification Schemes For A Low Speed Sensor Less IM Drivesajs201100% (1)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- RC 1970 01 PDFDokument68 SeitenRC 1970 01 PDFAntonio Madueño LunaNoch keine Bewertungen
- Installation Guide: HP Integrity rx4640 ServerDokument113 SeitenInstallation Guide: HP Integrity rx4640 ServerbahmannewNoch keine Bewertungen
- TL-SG2008 V1 Datasheet PDFDokument4 SeitenTL-SG2008 V1 Datasheet PDFTelefonia Unificada De Oscar MiyNoch keine Bewertungen
- CAT 323 DL 2013 LeafletDokument20 SeitenCAT 323 DL 2013 LeafletLuka BornaNoch keine Bewertungen
- User's Manual: CNPS9700 / 9500A LEDDokument9 SeitenUser's Manual: CNPS9700 / 9500A LEDNelson CantoNoch keine Bewertungen
- DS Servo Motor ACM604V60-01-2500 enDokument3 SeitenDS Servo Motor ACM604V60-01-2500 enRafael Morais MachadoNoch keine Bewertungen
- 34OJWN3gb Installation and OperatingDokument16 Seiten34OJWN3gb Installation and OperatingluanagueNoch keine Bewertungen
- Electrical Machines Lab ManualDokument133 SeitenElectrical Machines Lab ManualDagnachewNoch keine Bewertungen
- Default Password List Last Updated 10.22.2010Dokument31 SeitenDefault Password List Last Updated 10.22.2010Rajasekhar BattulaNoch keine Bewertungen
- R-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFDokument510 SeitenR-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFfrederic190pNoch keine Bewertungen
- 2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Dokument48 Seiten2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Ranko KohimeNoch keine Bewertungen
- Air Conditioner Standard Series: SpesifikasiDokument5 SeitenAir Conditioner Standard Series: SpesifikasiAndie NoegrohoNoch keine Bewertungen
- Check List For Acdb: Document NoDokument2 SeitenCheck List For Acdb: Document NoJaswant SutharNoch keine Bewertungen
- Dse402mk11 Data SheetDokument2 SeitenDse402mk11 Data Sheetgigo_dreamNoch keine Bewertungen
- Si5351A WSPR Transceiver ProjectDokument10 SeitenSi5351A WSPR Transceiver Projectbart morse100% (1)
- Dece 1040-3040 SyllabusDokument220 SeitenDece 1040-3040 Syllabusnanobala15100% (1)
- SPWM Full Bridge Transformerless PV Grid Connected InverterDokument9 SeitenSPWM Full Bridge Transformerless PV Grid Connected InverterOdnamra AlvarezNoch keine Bewertungen
- PSS20 Cost ReportDokument385 SeitenPSS20 Cost Reportjaciel leonNoch keine Bewertungen
- T403 Surface and Volume Resisivity TestereDokument4 SeitenT403 Surface and Volume Resisivity TestereAviv Al RasyidNoch keine Bewertungen
- 7SR11 and 7SR12 - Argus Complete Technical ManualDokument406 Seiten7SR11 and 7SR12 - Argus Complete Technical ManualAndré Eiti KobayashiNoch keine Bewertungen
- 3MN-00482-0004-REZZA Issue 0 03Dokument122 Seiten3MN-00482-0004-REZZA Issue 0 03Yasser El-sammakNoch keine Bewertungen
- LabVIEW 8.5 Basics IDokument498 SeitenLabVIEW 8.5 Basics ICarlos Andres Mendoza ChacónNoch keine Bewertungen
- Introduction of Materials Science & EngineeringDokument19 SeitenIntroduction of Materials Science & EngineeringAlexander DavidNoch keine Bewertungen
- Turn Over LetterDokument3 SeitenTurn Over LetterJake MonteroNoch keine Bewertungen
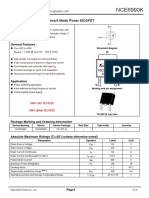
- NCE6990K: NCE N-Channel Enhancement Mode Power MOSFETDokument7 SeitenNCE6990K: NCE N-Channel Enhancement Mode Power MOSFETpepenitoNoch keine Bewertungen
- Gas Manager W-FM54Dokument104 SeitenGas Manager W-FM54Rodolfo Tinajero Preciado100% (1)
- Marshall Class 5 Owner ManualDokument4 SeitenMarshall Class 5 Owner ManualJuan Cruz LeónNoch keine Bewertungen
- 173400Dokument211 Seiten173400aiabbasi9615Noch keine Bewertungen
- RadiosByHallicrafters PDFDokument236 SeitenRadiosByHallicrafters PDFJosue Hernandez Gutierrez100% (2)
- Broch Specs EnglDokument12 SeitenBroch Specs EnglSteve WanNoch keine Bewertungen