Das könnte Ihnen auch gefallen
- 7a543e0f - Fuel Saving Tips BookletDokument6 Seiten7a543e0f - Fuel Saving Tips Bookletraju3685Noch keine Bewertungen
- Ugc Journal ListDokument1 SeiteUgc Journal Listraju3685Noch keine Bewertungen
- Seagate Backup Plus Hub: ModelDokument23 SeitenSeagate Backup Plus Hub: Modelraju3685Noch keine Bewertungen
- Drinks Brochure Z2105!87!0215WEBDokument36 SeitenDrinks Brochure Z2105!87!0215WEBraju3685Noch keine Bewertungen
- Choose The Best Element Size To Yield AcDokument16 SeitenChoose The Best Element Size To Yield Acraju3685Noch keine Bewertungen
- SwiftDzire PDFDokument177 SeitenSwiftDzire PDFraju3685Noch keine Bewertungen
- ONESIDE Technical Notes PDFDokument9 SeitenONESIDE Technical Notes PDFraju3685Noch keine Bewertungen
- Beam Deflection FormulaeDokument2 SeitenBeam Deflection Formulae7575757575100% (6)
- IMF Spring MountDokument1 SeiteIMF Spring Mountraju3685Noch keine Bewertungen
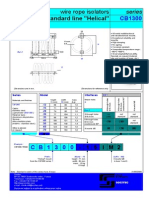
- Socitec Wirerope Iso Load Deflection PDFDokument0 SeitenSocitec Wirerope Iso Load Deflection PDFraju3685Noch keine Bewertungen
- 4 - Matrix Stiffness MethodDokument148 Seiten4 - Matrix Stiffness MethodAshok SinghNoch keine Bewertungen
- Aeroflex Isolators Catalogue PDFDokument28 SeitenAeroflex Isolators Catalogue PDFraju3685Noch keine Bewertungen
- Vibration Isolation TheoryDokument4 SeitenVibration Isolation TheoryRa BalamuruganNoch keine Bewertungen
- Application For FacultypmcoeDokument2 SeitenApplication For Facultypmcoeraju3685Noch keine Bewertungen
- Engineer Woh Hai Jo Aksar Phasta HaiDokument1 SeiteEngineer Woh Hai Jo Aksar Phasta HaipraveenrangareNoch keine Bewertungen
- PolytechnicDokument1 SeitePolytechnicraju3685Noch keine Bewertungen
- Wartsila SP PPT 2011 LNGDokument38 SeitenWartsila SP PPT 2011 LNGraju3685100% (1)
- Jan Lokpal Bill Draft 2.1Dokument36 SeitenJan Lokpal Bill Draft 2.1Vikash SharmaNoch keine Bewertungen
- Beam Deflection FormulaeDokument2 SeitenBeam Deflection Formulae7575757575100% (6)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Chapter 4Dokument21 SeitenChapter 4inirreNoch keine Bewertungen
- Programming Practice (Solved 100+ Version 1)Dokument99 SeitenProgramming Practice (Solved 100+ Version 1)Iqra IjazNoch keine Bewertungen
- How Did You Win A Medal in The IMODokument2 SeitenHow Did You Win A Medal in The IMOVinay KumarNoch keine Bewertungen
- Class: Nursery Course Price ListDokument10 SeitenClass: Nursery Course Price ListAzhar HussainNoch keine Bewertungen
- Experiment 7 - : Using Matlab To Form The Y-BusDokument2 SeitenExperiment 7 - : Using Matlab To Form The Y-BusgivepleaseNoch keine Bewertungen
- THE OLYMPIAD CORNER - Canadian Mathematical Society (PDFDrive) PDFDokument64 SeitenTHE OLYMPIAD CORNER - Canadian Mathematical Society (PDFDrive) PDFFustei BogdanNoch keine Bewertungen
- Applications of Matrices and DeterminantsDokument10 SeitenApplications of Matrices and DeterminantsMuhammad Alam KhanNoch keine Bewertungen
- Mms4 Textbook Unit3 MultiplicationanddivisionDokument42 SeitenMms4 Textbook Unit3 MultiplicationanddivisionDelfinBijuNoch keine Bewertungen
- Lattimore Szepesvari18bandit Algorithms PDFDokument513 SeitenLattimore Szepesvari18bandit Algorithms PDFAnkit PalNoch keine Bewertungen
- II Sem CBCS TT 2022Dokument32 SeitenII Sem CBCS TT 2022Shiju ShajiNoch keine Bewertungen
- Unit4 PDFDokument36 SeitenUnit4 PDFDane SinclairNoch keine Bewertungen
- Complex Integration McqnotesDokument33 SeitenComplex Integration McqnotesMîssìlé Prãñëêth SåíNoch keine Bewertungen
- Chapter 3 PDFDokument60 SeitenChapter 3 PDFFaheem GulzarNoch keine Bewertungen
- Ito's LemmaDokument7 SeitenIto's Lemmasambhu_nNoch keine Bewertungen
- Asas NomborDokument231 SeitenAsas Nombor顾星Noch keine Bewertungen
- BreqnDokument102 SeitenBreqnhahaggergNoch keine Bewertungen
- Rate Ratio ProportionDokument31 SeitenRate Ratio ProportionPabora KennethNoch keine Bewertungen
- (Brian S Thomson) The Calculus Integral PDFDokument710 Seiten(Brian S Thomson) The Calculus Integral PDFAndres FelipeNoch keine Bewertungen
- Digital Logic DesignDokument4 SeitenDigital Logic DesignShareef KhanNoch keine Bewertungen
- Aptitude Solved Problems - 10Dokument8 SeitenAptitude Solved Problems - 10dhivya sankarNoch keine Bewertungen
- MA 108 - Quiz 2 - D3 T1: Tutor: Raaz Dwivedi Apr 10, 2013Dokument1 SeiteMA 108 - Quiz 2 - D3 T1: Tutor: Raaz Dwivedi Apr 10, 2013Singh ChitNoch keine Bewertungen
- 0405 QS026 - 2 PDFDokument6 Seiten0405 QS026 - 2 PDFNandNoch keine Bewertungen
- PPSC Mock Test 2 Akhtar AbbasDokument4 SeitenPPSC Mock Test 2 Akhtar AbbasUmair AliNoch keine Bewertungen
- Programming Assignments of Deep Learning Specialization 5 Courses 1Dokument304 SeitenProgramming Assignments of Deep Learning Specialization 5 Courses 1himanshu singhNoch keine Bewertungen
- General Mathematics: Name: - Score: - Section: - DateDokument4 SeitenGeneral Mathematics: Name: - Score: - Section: - DateDE ASIS, JOSHUA Y.Noch keine Bewertungen
- Unit 4 - Assignment Brief - Quantitative MethodsDokument3 SeitenUnit 4 - Assignment Brief - Quantitative Methodsmathew clayNoch keine Bewertungen
- Concepts and Techniques: Data MiningDokument78 SeitenConcepts and Techniques: Data MiningbhargaviNoch keine Bewertungen
- Introduction To MATLAB: Kathmandu UniversityDokument5 SeitenIntroduction To MATLAB: Kathmandu UniversityRem IvaskNoch keine Bewertungen
- Magic Equation r1 (All Codes)Dokument16 SeitenMagic Equation r1 (All Codes)Prashant SunagarNoch keine Bewertungen
- EMS-02 Quantitative AnalysisDokument34 SeitenEMS-02 Quantitative AnalysisMohammad Al-jammaliNoch keine Bewertungen