Das könnte Ihnen auch gefallen
- Schraubenberechnung Nach VDI 2230Dokument5 SeitenSchraubenberechnung Nach VDI 2230bennyfergusonNoch keine Bewertungen
- Konst I WS0708 GesamtDokument39 SeitenKonst I WS0708 GesamtsabatinNoch keine Bewertungen
- MB002 CellformDokument10 SeitenMB002 Cellformuser 54Noch keine Bewertungen
- Maschinendynamik - Kapitel 5Dokument25 SeitenMaschinendynamik - Kapitel 5marburg1984Noch keine Bewertungen
- Starke Abi Prüfung Physik 2022Dokument37 SeitenStarke Abi Prüfung Physik 2022huss eldNoch keine Bewertungen
- Schubspannung Infolge Querkraft Bei Biegung - 1Dokument16 SeitenSchubspannung Infolge Querkraft Bei Biegung - 1verliebt12345Noch keine Bewertungen
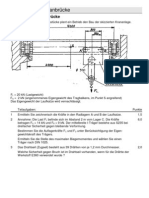
- TGT HP198788-2 KranbrueckeDokument6 SeitenTGT HP198788-2 KranbrueckehippokgNoch keine Bewertungen
- Einfuehrung Ins ProjektmanagementDokument264 SeitenEinfuehrung Ins Projektmanagement101ar100% (3)
- Physik - FSP-Prüfungsbeispiel 2Dokument14 SeitenPhysik - FSP-Prüfungsbeispiel 2Abdullah ChahineNoch keine Bewertungen
- Technews 2008 5Dokument11 SeitenTechnews 2008 5Mario IlićNoch keine Bewertungen
- Aufgaben PZBDokument4 SeitenAufgaben PZBSteven Hirsch67% (3)
- KrahnbanDokument9 SeitenKrahnbanOkanSukruNoch keine Bewertungen
- Grundlagen Für Die AuslegungDokument35 SeitenGrundlagen Für Die Auslegungqtang123_269609815Noch keine Bewertungen
- Ansys Ubung FEM SchrumpfsitzDokument17 SeitenAnsys Ubung FEM SchrumpfsitzmehdilaserNoch keine Bewertungen
- Abiturpruefung Wahlteil 2007 Geometrie II 1 Mit Loesungen Baden-Wuerttemberg 01 PDFDokument4 SeitenAbiturpruefung Wahlteil 2007 Geometrie II 1 Mit Loesungen Baden-Wuerttemberg 01 PDFa99carlitos100% (1)
- KreisfunktionenDokument45 SeitenKreisfunktionenmanfredm6435100% (1)
- Excerpt 001Dokument27 SeitenExcerpt 001Meizan Twista HerbianNoch keine Bewertungen
- Musterloesung - SoSe2012 KlausurDokument13 SeitenMusterloesung - SoSe2012 KlausurDavid AhouaNoch keine Bewertungen
- Technisches Datenblatt T153Dokument36 SeitenTechnisches Datenblatt T153Ako BogdaNoch keine Bewertungen
- Skript - Maschinendynamik - Kapitel 2Dokument35 SeitenSkript - Maschinendynamik - Kapitel 2marburg1984Noch keine Bewertungen
- Kap 06Dokument22 SeitenKap 06cacbuNoch keine Bewertungen
- Sinus-S40 Komplet DEDokument21 SeitenSinus-S40 Komplet DEDamirNoch keine Bewertungen
- Wir Kung S WeiseDokument13 SeitenWir Kung S WeisekinosiNoch keine Bewertungen
- Losung2Dokument4 SeitenLosung2noyir45895Noch keine Bewertungen
- BiegungDokument15 SeitenBiegungMustuncNoch keine Bewertungen
- SpurführungDokument9 SeitenSpurführungOliver OpitzNoch keine Bewertungen
- Uebungsaufgaben-Stark Mathe ABI 2010 Baden-WuerttembergDokument194 SeitenUebungsaufgaben-Stark Mathe ABI 2010 Baden-WuerttembergKlaus SandigerNoch keine Bewertungen
- Kocsányi Problems in Phisyk 1-2Dokument37 SeitenKocsányi Problems in Phisyk 1-2arkathNoch keine Bewertungen
- Vektoranalysis IDokument16 SeitenVektoranalysis IHannes MichaelisNoch keine Bewertungen
- TGT HP198081-2 VerladekranDokument4 SeitenTGT HP198081-2 VerladekranhippokgNoch keine Bewertungen
- 3 1Dokument9 Seiten3 1Ing Alexander AcureroNoch keine Bewertungen
- OrbitAnalyse - Seiten Aus RotordyanmikDokument13 SeitenOrbitAnalyse - Seiten Aus RotordyanmikKarlPeterXXXNoch keine Bewertungen
- CiMS-GTR 2.2 - Erlkoenig 2Dokument3 SeitenCiMS-GTR 2.2 - Erlkoenig 2norma_fuentes_45Noch keine Bewertungen
- Berechnung - Uebung 2Dokument3 SeitenBerechnung - Uebung 2sunny tamrakarNoch keine Bewertungen
- A Tubular Steel Dome Bse-Me-001 - 1965 - 25 - 8 - DDokument11 SeitenA Tubular Steel Dome Bse-Me-001 - 1965 - 25 - 8 - DMARIA BEATRIZ ABELENDANoch keine Bewertungen
- Physikschulaufgabe: 1. FederpendelDokument2 SeitenPhysikschulaufgabe: 1. Federpendelrenate.fichtlNoch keine Bewertungen
- Hauptprotokoll Abs 30 05Dokument8 SeitenHauptprotokoll Abs 30 05fatma_zehra_4Noch keine Bewertungen
- Castigliano Am KettengliedDokument4 SeitenCastigliano Am KettengliedZeuberNoch keine Bewertungen
- DIN 1045-1 Примечания. Erlaeuterungen DAfStb Heft 525 Ber-1 2005-05Dokument11 SeitenDIN 1045-1 Примечания. Erlaeuterungen DAfStb Heft 525 Ber-1 2005-05RomanNoch keine Bewertungen
- Schue TT Gutta Gung 2004Dokument22 SeitenSchue TT Gutta Gung 2004Sergio LamanaNoch keine Bewertungen
- KL2 Ha1Dokument5 SeitenKL2 Ha1e210505030Noch keine Bewertungen
- KukaDokument10 SeitenKukaTato LeonNoch keine Bewertungen
- KLME B 01 Beleg 2022 23Dokument5 SeitenKLME B 01 Beleg 2022 23EmilyNoch keine Bewertungen
- Elektrotechnik 2 sampleDokument5 SeitenElektrotechnik 2 sampleCarlos CalvoNoch keine Bewertungen
- Lösungen 2011Dokument24 SeitenLösungen 2011adrianuhlNoch keine Bewertungen
- Kapitel 3 AufgabenDokument4 SeitenKapitel 3 AufgabenAlejandra GiraldoNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung09Dokument11 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung09yaswa1Noch keine Bewertungen
- pp38 44Dokument7 Seitenpp38 44miliNoch keine Bewertungen
- 01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauDokument16 Seiten01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauJan Gnat100% (1)
- Versuch M1Dokument11 SeitenVersuch M1business.ahmadialiNoch keine Bewertungen
- Kirchmayer Ernst S1Dokument12 SeitenKirchmayer Ernst S1shimic32000Noch keine Bewertungen
- TGT HP199192-1 ParkliftDokument6 SeitenTGT HP199192-1 ParklifthippokgNoch keine Bewertungen
- 03 - Vorlesung Antriebstechnik Drehstrommaschinen - 1 - WS18Dokument31 Seiten03 - Vorlesung Antriebstechnik Drehstrommaschinen - 1 - WS18sh.karkani1989Noch keine Bewertungen
- 14 Getriebe V302Dokument27 Seiten14 Getriebe V302Hector Preciado ValenzuelaNoch keine Bewertungen
- UebungsserieDokument45 SeitenUebungsserieTobias StaubNoch keine Bewertungen
- BiegebemDokument23 SeitenBiegebemdivyareddyNoch keine Bewertungen
- SchispringenDokument3 SeitenSchispringenMax MaierNoch keine Bewertungen
- Generierung Von Bauteilgeometrien - Langfassung - Koehler - 3D-NordOstDokument9 SeitenGenerierung Von Bauteilgeometrien - Langfassung - Koehler - 3D-NordOstStevieNoch keine Bewertungen
- Zur Berechnung Von Fahrleitungsschwingungen Mit Hilfe Frequenzabhängiger Finiter ElementeDokument16 SeitenZur Berechnung Von Fahrleitungsschwingungen Mit Hilfe Frequenzabhängiger Finiter Elementematze1395.sNoch keine Bewertungen
- SCHR 02fcDokument18 SeitenSCHR 02fcIvana OomingmakNoch keine Bewertungen
- Musterloesung - WiSe1112 KlausurDokument11 SeitenMusterloesung - WiSe1112 KlausurDavid AhouaNoch keine Bewertungen
- SpaunDokument5 SeitenSpaunAlexander WieseNoch keine Bewertungen
- Kompressor L07 - 22-AirStation-6Dokument8 SeitenKompressor L07 - 22-AirStation-6Carlino GmbHNoch keine Bewertungen
- Phoenix SS0802E SafeDokument2 SeitenPhoenix SS0802E SafevegagbNoch keine Bewertungen
- TT Product Overview 202204 DE EN Lowres Opt PDFDokument24 SeitenTT Product Overview 202204 DE EN Lowres Opt PDFraduNoch keine Bewertungen