Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- WML and WapDokument3 SeitenWML and WapRay FizzNoch keine Bewertungen
- Infection Control Construction PermitDokument2 SeitenInfection Control Construction PermitWisniardhy Suarnata PradanaNoch keine Bewertungen
- Check List - 3D Model ReviewDokument28 SeitenCheck List - 3D Model ReviewNikhil ChaundkarNoch keine Bewertungen
- Evidence Describing Cities and Places PaolaDokument5 SeitenEvidence Describing Cities and Places PaolaCatalina g. gNoch keine Bewertungen
- History of Civil EngineeringDokument42 SeitenHistory of Civil EngineeringNoor Azirah Abd AzizNoch keine Bewertungen
- Project 1 BriefDokument3 SeitenProject 1 Briefapi-289083087100% (1)
- Planning Week 2Dokument27 SeitenPlanning Week 2Bea Jemifaye AndalNoch keine Bewertungen
- 022 Painting Spec (A)Dokument8 Seiten022 Painting Spec (A)sravan_kits929Noch keine Bewertungen
- Together! The New Architecture of The Collective at The Vitra Design MuseumDokument14 SeitenTogether! The New Architecture of The Collective at The Vitra Design MuseumFrancisco Pereira0% (1)
- Ground Floor Plan Second Floor Plan: Project Tittle: Approved By: Sheet Contents: Sheet No.: RevisionsDokument16 SeitenGround Floor Plan Second Floor Plan: Project Tittle: Approved By: Sheet Contents: Sheet No.: RevisionsMaria Christina Abadu TagacayNoch keine Bewertungen
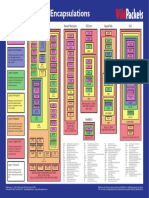
- Protocol Family Encapsulations ChartDokument1 SeiteProtocol Family Encapsulations ChartbhzNoch keine Bewertungen
- Case Studies EPM-SAP Integration PTB04 SGDokument42 SeitenCase Studies EPM-SAP Integration PTB04 SGachyutNoch keine Bewertungen
- How To Build A SupercomputerDokument8 SeitenHow To Build A SupercomputerAravind IlangoNoch keine Bewertungen
- Inspection and Test Plan - General Civil Works at Adr&Ruwais RefineryDokument4 SeitenInspection and Test Plan - General Civil Works at Adr&Ruwais RefineryJithesh.k.sNoch keine Bewertungen
- Example of Competency Statement For Ieng and Milp PDFDokument5 SeitenExample of Competency Statement For Ieng and Milp PDFakanuruddhaNoch keine Bewertungen
- Two Way Slab - Reinforced Concrete DesignDokument52 SeitenTwo Way Slab - Reinforced Concrete DesignEngr SantosNoch keine Bewertungen
- Floating Offshore Platform DesignDokument46 SeitenFloating Offshore Platform DesignAchmad Arif Angga Utama100% (2)
- Staad Pro - An OverviewDokument32 SeitenStaad Pro - An Overviewasdfg1hNoch keine Bewertungen
- Subnetting Secrets Book 1Dokument0 SeitenSubnetting Secrets Book 1Gulshan NematovaNoch keine Bewertungen
- 07.PERILEX® CF - REFRAMAG® CF - ALMAG® CF - The New Basic Brick Concept by REFRATECHNIK - PPT (Kompatibilitätsmodus)Dokument26 Seiten07.PERILEX® CF - REFRAMAG® CF - ALMAG® CF - The New Basic Brick Concept by REFRATECHNIK - PPT (Kompatibilitätsmodus)MUhammad Ishfaq Shakoor100% (2)
- Cloudera HiveDokument106 SeitenCloudera HivediegocueNoch keine Bewertungen
- Lighting System DesignDokument2 SeitenLighting System DesignReybin AlvarezNoch keine Bewertungen
- 3.10 Early Roofing and Roof Materials in South AustraliaDokument45 Seiten3.10 Early Roofing and Roof Materials in South AustraliaPham Ha AnNoch keine Bewertungen
- About Floatel An Eco-Friendly Hotel, KolkataDokument3 SeitenAbout Floatel An Eco-Friendly Hotel, KolkataSumit Thaker100% (1)
- A Drowning IncidentDokument2 SeitenA Drowning IncidentZakriya Bashir-Hill100% (2)
- Building With Alternative MaterialsDokument10 SeitenBuilding With Alternative MaterialsCharmaine R. TaylorNoch keine Bewertungen
- 1 200Dokument51 Seiten1 200459pawanNoch keine Bewertungen
- Proof of ConceptDokument56 SeitenProof of ConceptRavi ManraNoch keine Bewertungen
- Calendar: Introduction To Cisco Networking Technologies (INTRO) v2.1Dokument3 SeitenCalendar: Introduction To Cisco Networking Technologies (INTRO) v2.1qgocongNoch keine Bewertungen