Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Dy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatiDokument7 SeitenDy DX: NPTEL Course Developer For Fluid Mechanics Dr. Niranjan Sahoo Module 04 Lecture 33 IIT-GuwahatilawanNoch keine Bewertungen
- Application For New Ration Card - Telangana & AP StatesDokument1 SeiteApplication For New Ration Card - Telangana & AP Statesping2gopiNoch keine Bewertungen
- FairyDokument1 SeiteFairyprojekti.jasminNoch keine Bewertungen
- The Soyuzist JournalDokument15 SeitenThe Soyuzist Journalcatatonical thingsNoch keine Bewertungen
- Project Report On Design of Road IntersectionDokument15 SeitenProject Report On Design of Road IntersectionJohn MalkinNoch keine Bewertungen
- Market Research and AnalysisDokument5 SeitenMarket Research and AnalysisAbdul KarimNoch keine Bewertungen
- Turn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Dokument11 SeitenTurn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Meet MehtaNoch keine Bewertungen
- Apogee 3800 Service ManualDokument56 SeitenApogee 3800 Service ManualGauss Medikal Sistemler100% (1)
- Landini Tractor 7000 Special Parts Catalog 1820423m1Dokument22 SeitenLandini Tractor 7000 Special Parts Catalog 1820423m1katrinaflowers160489rde100% (122)
- By Daphne Greaves Illustrated by Michela GalassiDokument15 SeitenBy Daphne Greaves Illustrated by Michela GalassiLucian DilgociNoch keine Bewertungen
- Mechanical FPD P.sanchezDokument9 SeitenMechanical FPD P.sanchezHailley DensonNoch keine Bewertungen
- Surveillance of Healthcare-Associated Infections in Indonesian HospitalsDokument12 SeitenSurveillance of Healthcare-Associated Infections in Indonesian HospitalsRidha MardiyaniNoch keine Bewertungen
- ProposalDokument8 SeitenProposalapi-295634125Noch keine Bewertungen
- Disaster Management in Schools: Status ReportDokument28 SeitenDisaster Management in Schools: Status ReportRamalingam VaradarajuluNoch keine Bewertungen
- C# Program To Print Even NumbersDokument11 SeitenC# Program To Print Even NumbersNadikattu RavikishoreNoch keine Bewertungen
- Rosmary PollockDokument4 SeitenRosmary PollockhbNoch keine Bewertungen
- SPOUSES DAVID B. CARPO & and RECHILDA S. CARPO V. ELEANOR CHUA and ELMA DY NGDokument3 SeitenSPOUSES DAVID B. CARPO & and RECHILDA S. CARPO V. ELEANOR CHUA and ELMA DY NGRengie GaloNoch keine Bewertungen
- Leyson vs. OmbudsmanDokument12 SeitenLeyson vs. OmbudsmanDNAANoch keine Bewertungen
- Direct Marketing CRM and Interactive MarketingDokument37 SeitenDirect Marketing CRM and Interactive MarketingSanjana KalanniNoch keine Bewertungen
- Group Terms&ConditionsDokument5 SeitenGroup Terms&Conditionsbelen rodriguezNoch keine Bewertungen
- Java Programming Unit5 Notes PDFDokument110 SeitenJava Programming Unit5 Notes PDFVishnu VardhanNoch keine Bewertungen
- 8th Mode of FinancingDokument30 Seiten8th Mode of FinancingYaseen IqbalNoch keine Bewertungen
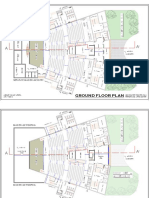
- Abhijit Auditorium Elective Sem 09Dokument3 SeitenAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNoch keine Bewertungen
- PlayAGS, Inc.Dokument309 SeitenPlayAGS, Inc.vicr100Noch keine Bewertungen
- Geography Cba PowerpointDokument10 SeitenGeography Cba Powerpointapi-489088076Noch keine Bewertungen
- Commercial Vehicle Aftermarket Catalog en UsDokument56 SeitenCommercial Vehicle Aftermarket Catalog en UsAion RadamanthysNoch keine Bewertungen
- Geigermullerteller (Nuts and Volts 2004-01)Dokument5 SeitenGeigermullerteller (Nuts and Volts 2004-01)Peeters GuyNoch keine Bewertungen
- Dilip - SFDC CPQ Architect14 GCDokument5 SeitenDilip - SFDC CPQ Architect14 GCmariareddy17100% (1)
- Misca 367 of 2008Dokument5 SeitenMisca 367 of 2008Kabelo TsehareNoch keine Bewertungen
- 13 DocumentsDokument38 Seiten13 DocumentsPoorClaresBostonNoch keine Bewertungen