Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- DATAKOM D500 DatasheetDokument4 SeitenDATAKOM D500 DatasheetdmytroNoch keine Bewertungen
- Huawei: Exam H12-211Dokument4 SeitenHuawei: Exam H12-211Carolina MontañoNoch keine Bewertungen
- 5G WTTX Planning V1.2Dokument41 Seiten5G WTTX Planning V1.2kofi_amoako_amoantwi100% (2)
- Profinet Commissioning & TestingDokument21 SeitenProfinet Commissioning & TestingAn HươngNoch keine Bewertungen
- CIS Windows Server 2008Dokument161 SeitenCIS Windows Server 2008Cesar BernalNoch keine Bewertungen
- Quickpeer: A P2P Framework For Distributed Application DevelopmentDokument11 SeitenQuickpeer: A P2P Framework For Distributed Application DevelopmentASNoch keine Bewertungen
- Understanding Serial and Parallel Data TransmissionDokument5 SeitenUnderstanding Serial and Parallel Data TransmissionNalini BholahNoch keine Bewertungen
- View Answer: (C) Multi-PointDokument27 SeitenView Answer: (C) Multi-PointAbhi BNoch keine Bewertungen
- Network Devices and Communication: Athar TanveerDokument30 SeitenNetwork Devices and Communication: Athar TanveerMUBEEN LIAQATNoch keine Bewertungen
- Joybook DC Joybook Lite T131 20091126 152555 T131 FCS VerB (Circuit Diagram) 050509Dokument42 SeitenJoybook DC Joybook Lite T131 20091126 152555 T131 FCS VerB (Circuit Diagram) 050509Виола БорисовскаяNoch keine Bewertungen
- NS LogMessagesDokument54 SeitenNS LogMessagessudharaghavanNoch keine Bewertungen
- IP Address Fundamentals ExplainedDokument18 SeitenIP Address Fundamentals ExplainedHan NiefNoch keine Bewertungen
- China Unicom: Enhancing The User ExperienceDokument3 SeitenChina Unicom: Enhancing The User ExperienceHumayun KabirNoch keine Bewertungen
- SmartSchool ICTDokument9 SeitenSmartSchool ICTvivek6399Noch keine Bewertungen
- Using IBM X-Force Deep Packet Inspection in The IBM Security Access Manager ApplianceDokument21 SeitenUsing IBM X-Force Deep Packet Inspection in The IBM Security Access Manager Applianceseeraj4urajNoch keine Bewertungen
- List of Command PromtDokument34 SeitenList of Command PromtferiferiNoch keine Bewertungen
- SAP Function Module Reference GuideDokument10 SeitenSAP Function Module Reference GuideAnonymous zWS4U8NNoch keine Bewertungen
- SYLLABUSDokument3 SeitenSYLLABUSArkajyoti SahaNoch keine Bewertungen
- DCE Chapter 4 - IDokument15 SeitenDCE Chapter 4 - IkarunaNoch keine Bewertungen
- Cs 60Dokument80 SeitenCs 60Sirsendu RoyNoch keine Bewertungen
- System Platform Getting StartedDokument70 SeitenSystem Platform Getting StartedLenin PachecoNoch keine Bewertungen
- Active Directory Backup and Restore1Dokument20 SeitenActive Directory Backup and Restore1NagarajuRbNoch keine Bewertungen
- Design and Implementation of A Cloud Based Lecture Notes (Material) Distribution SystemDokument45 SeitenDesign and Implementation of A Cloud Based Lecture Notes (Material) Distribution Systemofficial adeNoch keine Bewertungen
- Rogue Wireless AP Detection Using Delay Fluctuation in Backbone NetworkDokument2 SeitenRogue Wireless AP Detection Using Delay Fluctuation in Backbone NetworkbloghunterzNoch keine Bewertungen
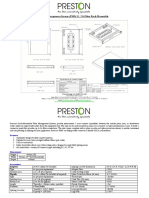
- 9 12, 24 Rack Mount LIU DatasheetDokument2 Seiten9 12, 24 Rack Mount LIU DatasheetBalakrishnan KrishnanNoch keine Bewertungen
- THE LOCK STATUS OF YOUR IPHONE - IMEI - Info PDFDokument5 SeitenTHE LOCK STATUS OF YOUR IPHONE - IMEI - Info PDFDoris RiverosNoch keine Bewertungen
- Ipsec: Authentication Header (Ah) : The Ah Protocol Provides A Mechanism ForDokument2 SeitenIpsec: Authentication Header (Ah) : The Ah Protocol Provides A Mechanism ForGaurav SharmaNoch keine Bewertungen