Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Compared Fire Safety Features For Metro TunnelsDokument8 SeitenCompared Fire Safety Features For Metro Tunnelsismet_hiNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Ac Contact LineDokument10 SeitenAc Contact Lineismet_hiNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Flame Sensor FS-5000E: FeaturesDokument2 SeitenFlame Sensor FS-5000E: Featuresismet_hiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- ABB Hand BookDokument323 SeitenABB Hand BookVikas MalikNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Three-Phase Asynchronous MotorsDokument46 SeitenThree-Phase Asynchronous Motorswartsil100% (4)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Product Data Sheet: 5AA62000M CL DECKE 10 MIDI, 1x35W, QPAR51, TSGDokument3 SeitenProduct Data Sheet: 5AA62000M CL DECKE 10 MIDI, 1x35W, QPAR51, TSGismet_hiNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
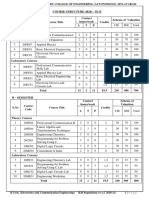
- LBRCE ECE Course StructureDokument126 SeitenLBRCE ECE Course Structuresubbu subrahmanyamNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Basic Insulation & Power Factor Theory ExplainedDokument17 SeitenBasic Insulation & Power Factor Theory ExplainedNeelakandan Masilamani100% (2)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Arduino CNC Laser Enrgaver From DVD DriveDokument10 SeitenArduino CNC Laser Enrgaver From DVD DriveJonatán Hugo AvendañoNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- 140 TOP electrical engineering transformer questionsDokument24 Seiten140 TOP electrical engineering transformer questionsRangpariya AmitNoch keine Bewertungen
- Milling and Grinding Machines GuideDokument16 SeitenMilling and Grinding Machines GuidealysonmicheaalaNoch keine Bewertungen
- RHPZ, A Two Way Control PathDokument11 SeitenRHPZ, A Two Way Control PathkurabyqldNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Polimeros Adhesivos y Conductores de ElectricidadDokument66 SeitenPolimeros Adhesivos y Conductores de ElectricidadDAYANA ALEJANDRA LNPEZ LUJNNNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Design of Electrical Power SystemsDokument36 SeitenDesign of Electrical Power SystemsAhmed AwadenNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- SBS VRLA Type Front Terminal Range Summary PDFDokument2 SeitenSBS VRLA Type Front Terminal Range Summary PDFehott23Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Ics 61800 4Dokument9 SeitenIcs 61800 4Bharat Kumar0% (2)
- Electrical Engineering - Electrical MachinesDokument78 SeitenElectrical Engineering - Electrical MachinesSangeetha Veera0% (1)
- CAT 910 Charging SystemDokument15 SeitenCAT 910 Charging SystemYober Emilio Nato AcostaNoch keine Bewertungen
- Low-Power Economy Bicmos Current-Mode PWMDokument26 SeitenLow-Power Economy Bicmos Current-Mode PWMmigsayalNoch keine Bewertungen
- Sursa de Tensiune - DatasheetDokument2 SeitenSursa de Tensiune - DatasheetAdrianaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- That 1246Dokument8 SeitenThat 1246João PauloNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Pic12f1572 40001723CDokument308 SeitenPic12f1572 40001723CAnonymous 3GwpCKNoch keine Bewertungen
- Z-Source Converters Overcome LimitationsDokument12 SeitenZ-Source Converters Overcome Limitationsravirnjn88Noch keine Bewertungen
- GLP21 CH tx-32lx60 PDFDokument56 SeitenGLP21 CH tx-32lx60 PDFBoKi PoKiNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Panasonic DMR Eh60pcDokument82 SeitenPanasonic DMR Eh60pcdioporcasso0% (1)
- Jbiet r20 Physics Lab Manual-2020Dokument63 SeitenJbiet r20 Physics Lab Manual-2020AHMADNoch keine Bewertungen
- How To Measure Duty Cycle With A Digital MultimeterDokument2 SeitenHow To Measure Duty Cycle With A Digital MultimeterCiprian AndreescuNoch keine Bewertungen
- Activity 3.pmdDokument3 SeitenActivity 3.pmdMy EMailNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Atlas Users1Dokument1.691 SeitenAtlas Users1Tanu chaudharyNoch keine Bewertungen
- PT4115EDokument18 SeitenPT4115Edragom2Noch keine Bewertungen
- Static Trip ManualDokument52 SeitenStatic Trip ManualRavijoisNoch keine Bewertungen
- Electrical Transmission and Distribution System and DesignDokument67 SeitenElectrical Transmission and Distribution System and DesignAdrian Toribio100% (3)
- One PN Junction 2. Two PN Junctions 3. Three PN Junctions 4. Four PN JunctionsDokument17 SeitenOne PN Junction 2. Two PN Junctions 3. Three PN Junctions 4. Four PN JunctionsPiyush sharmaNoch keine Bewertungen
- Extremely Low Frequency Radio Receiver Circuit Project With VU MeterDokument3 SeitenExtremely Low Frequency Radio Receiver Circuit Project With VU MeterpecceriniNoch keine Bewertungen
- IRAUDAMP70Dokument42 SeitenIRAUDAMP70Edmond HaidauNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)