Beruflich Dokumente
Kultur Dokumente
Ready ExpNew
Hochgeladen von
sri2maniOriginalbeschreibung:
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Ready ExpNew
Hochgeladen von
sri2maniCopyright:
Verfügbare Formate
1.
INTRODUCTION
1.1 General
In Eighties, almost all electric power utilities throughout the world operated with an
organizational model in which one controlling authoritythe utilityoperated the generation,
transmission, and distribution systems located in a fixed geographic area and it refers to as
vertically integrated utilities. Economists for some time had questioned whether this monopoly
organization was efficient. With the example of the economic benefits to society resulting from
the deregulation of other industries such as telecommunications and airlines, electric utilities are
also introducing privatization in their sectors to improve efficiency. During the nineties many
electrical utilities and power network companies world wide have been forced to change their
ways of doing business from vertically integrated mechanism to open market system. This kind
of process is called as deregulation or restructuring.
Deregulation word refers to un-bundling of electrical utility or restructuring of electrical utility
and allowing private companies to participate. The aim of deregulation is to introduce an element
of competition into electrical energy delivery and thereby allow market forces to price energy at
low rates for the customer and higher efficiency for the suppliers
the necessity for deregulation is
i)To provide cheaper electricity.
ii)To offer greater choice to the customer in purchasing the economic Energy.
iii)To give more choice of generation.
iv)To offer better services with respect to power quality i.e. Constant voltage, constant freq.
and uninterrupted power supply.
The benefits that the customers and government will get with the deregulated power systems are
(i) Cheaper Electricity
(ii) Efficient capacity expansion planning at GENCO level, Transco level and
disco level.
(iii) Pricing is cost effective rather than a set tariff.
1
(iv) More choice of generation.
(v) Better service is possible.
In deregulated power systems TRANSCOs, GENCOs, DISCOs are under different organizations
[1]. To maintain the coordination between them there will be one system operator in all types of
deregulated power system models, generally called Independent System Operator (ISO).
In deregulated environment, all the GENCOs and DISCOs make the transactions ahead of time,
but by the time of implementations, there may be congestion in some of the transmission lines.
Hence, ISO has to relieve that congestion so that the system is maintained in secure state. To
relieve the congestion ISO can use mainly two types of techniques, which are as follows [2]-[4]:
Cost free means:
(i) Out-aging of congested lines.
(ii) Operation of transformer taps/phase shifters.
(iii) Operation of FACTS devices particularly series devices.
Non-cost-free means:
i)Re-dispatch of generation in a manner different from the natural settling point of the
market. Some generators back down while others increase their output. The effect of
this is that generators no longer operate at equal incremental costs.
ii)Curtailment of loads and the exercise of (not-cost-free) load interruption options.
The Transmission congestion is defined as consequence of network constraints characterizing a
finite network capacity that prevents the simultaneous delivery of power from an associated set
of power transactions or when the producers and consumers of electric energy desire to produce
and consume in amounts that would cause the transmission system to operate at or beyond one or
more transmission limits, then the system is said to be congested. So finally controlling both the
generation and loads so that transfer limits of the transmission system are properly taken care is
known as congestion management.
In the deregulated power system the challenge of congestion management for the transmission
system operator (ISO) is to create a set of rules that ensure sufficient control over producers and
consumers (generators and loads) to maintain and acceptable level of power system security and
reliability in both the short term (real-time operation) and the long term while maximizing
market efficiency. The rules must be robust, because there will be many aggressive entities
seeking to exploit congestion to create market power and increased profits for themselves at the
expense of market efficiency. The rules should also be fair in how they affect participant, and
they should be transparent, that is, it should be clear to all participants why a particular outcome
has occurred.
If there is no congestion, there is one zone price throughout the system, and the generators are
paid the same price for their energy as the loads pay. When there is congestion, zone prices
differ, each generator paid different price[5].
Congestion in a transmission system, whether vertically organized or unbundled, cannot be
permitted except for very short duration, for fear of cascade outages with uncontrolled loss of
load. Some corrective measures such as outage of congested branches (lines or transformers),
using FACTS devices, operation of transformer taps, re-dispatch of generation and curtailment of
pool loads and/or bilateral contracts can relieve congestion. With out firm control of congestion,
the operation of transmission system can be compromised by the actions of market participants
who do not have an economic stake in its security and reliability. With out careful interaction of
congestion management and the economics of the energy market , market inefficiencies can take
away the savings, the utility promises to the society.
As deregulation of the electric system becomes an important issue in many countries, the
transmission congestion management, which the ISO has to perform more frequently, is
challenging. So, Flexible AC Transmission System (FACTS) become more and more commonly
used devices to relive congestion and maintain system security. They may be used to improve the
transient responses of power system and can also control the power flow (both active and
reactive power). The main advantages of FACTS are enhancing system flexibility and increasing
the load ability. Although FACTS devices have many advantages, they are handicapped due to
the high cost of the components.
3
Due to Deregulation, Power-wheeling transactions have become a very important issue.
Generally, Power wheeling is defined as the power transmitted from a power producer to a
customer through transmission systems and distribution facilities of third party. Since the
transmission facilities have their physical limitation, not all of the power wheeling transaction
can be accepted and carried out in the power market. Thermal limits of transmission facilities,
voltage limits at each bus, reactive power constraints of generating units and net interchange
constraints do limit the feasibility of power transfer. The ability of transmission to carry a
particular transaction from one point to another point is called Available Transfer Capability
(ATC) or the amount of power that can be safely transmitted between two locations in a power
system is called ATC.
Power transaction between a specific seller bus/area and a buyer bus/area can be committed only
when sufficient ATC is available for that interface to ensure the system security. The information
about the ATC is to be continuously updated and made available to the market participants
through the Internet-based system such as Open Access Same time Information System (OASIS)
[6],[7].
2 MODELING OF STATIC SYNCHRONOUS SERIES
COMPENSATOR (SSSC)
2.1 Introduction
Power system is to be continuously expanded and upgraded to cater the ever-growing power
demand. Due to limited energy resources, time and capital required, the present trend is looking
for the new techniques for improving the power system performance. A new technology
consisting of FACTS controllers has the ability to control the interrelated parameters that govern
the operation of transmission system including series impedance, shunt admittance, current,
voltage, phase angle and damping of oscillations at various frequencies below rated frequency.
FACTS controller enables a line to carry power closer to its thermal rating. FACTS devices are
the alternative transmission system incorporating power electronic based static controllers to
enhance controllability and increase power transfer capability. Flexibility of AC transmission
system refers to the ability to accommodate changes in the electric transmission system or
operating conditions, while maintaining sufficient transient and steady state stability limit of the
system [14].
In this chapter, different types of FACTS devices and their importances have been discussed.
Operating principle, equivalent circuit and load flow modeling of SSSC are discussed in detail.
2.1.1 Basic types of FACTS Devices
In general, FACTS controllers can be divided into four categories:
i)Series Controllers
ii)Shunt Controllers
iii)Combined Series-Series Controllers
iv)Combined Series-Shunt Controllers
5
(i) Series Controllers: The series Controller could be a variable impedance, such as
capacitor, reactor, etc., or a power electronics based variable source of main frequency, sub
synchronous and harmonic frequencies (or a combination) to serve the desired need. In principle,
all series controllers inject voltage in series with the line. Even a variable impedance multiplied
by the current flow through it, represents an injected series voltage in the line. As long as the
voltage is in phase quadrature with the line current, the series controller only supplies or
consumes variable reactive power. Any other phase relationship will involve handling of real
power as well.
(ii) Shunt Controllers: As in the case of series Controllers, the shunt Controllers may be
variable impedance, variable source, or a combination of these. In principle, all shunt Controllers
inject current in to the system at the point of connection. Even, a variable shunt impedance
connected to the line voltage causes a variable current flow and hence represents injection of
current into the line. As long as the injected current is in phase quadrature with the line voltage,
the shunt controller only supplies or consumes variable reactive power. Any other phase
relationship will involve handling of real power as well.
(iii) Combined Series-Series Controllers: This could be combination of separate series
controllers, which are controlled in a coordinated manner, in a multilane transmission system. Or
it could be a unified controller, which series controllers provide independent series reactive
compensation for each line but also transfer real power among the lines via a power link. The
real power transfer capability of the unified series-series controller, referred to as Interline Power
Flow Controller, makes it possible to balance both the real and reactive power flow in the lines
and thereby maximize the utilization of the transmission system. Note that the term unified
here means that the dc terminals of all Controller converters are all connected together for real
power transfer.
(iv) Combined Series-Shunt Controllers: This could be a combination of separate shunt
and series controllers, which are controlled in a coordinated manner, or a Unified Power Flow
Controller with series and shunt elements. In principle, combined shunt and series controllers
inject current into the system with the shunt part of the Controller and voltage in series in the line
with the series part of the Controller. However, when the shunt and series Controllers are unified,
there can be a real power exchange between the series and shunt Controllers via the power link.
2.1.2 Relative importance of different types of controllers
The series connected Controller impacts the driving voltage and hence the current and power
flow directly. Therefore, if the purpose of the application is to control the current / power flow
and damp oscillations, the series Controller for a given MVA size is several times more powerful
than the shunt Controller.
The shunt Controller, on the other hand, is like a current source, which draws from or injects
current into the line. The shunt Controller is a good way to control voltage at and around the
point of connection through injection of reactive current (leading or lagging), alone or a
combination of active and reactive current for a more effective voltage control and damping of
voltage oscillations.
The voltage fluctuations are largely a consequence of the voltage drop in series impedances of
lines, transformers, and generators. Therefore, adding or subtracting the FACTS Controller
voltage in series can be the most cost-effective way of improving the voltage profile.
Nevertheless, a shunt controller is much more effective in maintaining a required voltage profile
at a substation bus. One important advantage of the shunt Controller is that it serves the bus node
independently of the individual lines connected to the bus.
Series Controller solution may require, but not necessarily, a separate series Controller for
several lines connected to the substation, particularly if the application calls for contingency
outage of any one line. However, this should not be a decisive reason for choosing a shunt-
connected Controller, because the required MVA size of the series controller is small compared
to the shunt controller is small compared to the shunt controller, and, in any case, the shunt
controller does not provide control over the power flow in the lines.
On the other hand, series-connected Controllers have to be designed to ride through contingency
and dynamic overloads, and ride through or bypass short circuit currents. They can be protected
by metal-oxide arresters or temporarily bypassed by solid state devices when the fault current is
too high, but they have to be rated to handle dynamic and contingency overload.
7
The above arguments suggest that a combination of the series and shunt Controllers can provide
the best of both, i.e. an effective power/current flow and line voltage control.
For the combination of series and shunt Controllers, the shunt Controller can be a single unit
serving in coordination with individual line controllers. This arrangement can provide additional
benefits with unified controllers.
2.1.3 Benefits From The FACTS Technology
1Control of power flow as ordered: The use of control of power flow may be to follow a
contract, meet the utilities own needs, ensure optimum power flow, ride through
emergency conditions, or a combination therof.
2Increasing of loading capability of lines to their thermal capabilities including short term
and seasonal. This can be accomplished by overcoming the other limitations and sharing
of power among lines according to their capability. It is also important to note that
thermal capability of line varies by a very large margin based on the environment
conditions and loading history.
3Increase the system security through raising the transient stability limit, limiting short-
circuit currents and overloads, managing cascading blackouts and damping electro
mechanical oscillations of lower systems and machines
4Provide secure tie line connections to neighboring utilities and regions thereby decreasing
overall generation reserve requirements on both sides.
5Provide greater flexibility in siting new generation
6Upgrade of lines
7Reduce reactive power flows, thus allowing the lines to carry more active power
8Reduce loop flows
9Increase utilization of lowest cost generation. One of the principal reasons for transmission
interconnections is to utilize lowest cost generation. When, this cannot be done, it follows
that there is not enough cost-effective transmission capacity. Cost-effective enhancement
of capacity will therefore allow increased use of lowest cost of generation.
2.2 Static Synchronous Series Compensator (SSSC):
2.2.1 General:
A static synchronous generator operates with out an external electric energy source as a series
compensator whose output voltage is in quadrature with and controllable independently of the
line current for the purpose of increasing or decreasing the overall reactive voltage drop across
the line and thereby controlling the transmitted electric power. The SSSC may include transiently
rated energy storage or energy absorbing devices to enhance the dynamic behavior of the power
system by additional temporary real power compensation, to increase or decrease momentarily,
the overall real (resistive) voltage drop across the line.
The static synchronous series compensation is a synchronous voltage type series compensator
analogous to an ideal electromagnetic generator which can produce a set of alternating voltages
at the desired fundamental frequency with controllable amplitude and phase angle, when
connected to the power system generates or absorbs the reactive power and converts with an
electric energy storage system.
the Static Synchronous Series Compensator (SSSC). This device is effective to alter power
system parameters in order to increase power transfer capability, Stabilize system, help energy
market resolve congestion-caused problems and maximize economic value of transmission
system.
A SSSC offers a fast series compensation and offers flexible power system control, therefore it
can be utilized to control line active and reactive power, achieve more power transfer capability,
and to significantly improve power system reliability. As the SSSC is capable of controlling
power system parameters, it may offer a mechanism that may replace or help conventional
constraint mitigation methods, redirect or force power to flow along certain paths, help the
system operate more securely by increasing the level of power transfer between specific areas,
and in some cases may prevent generators to run out-of- merit or loads shedding or curtailment
9
that would be required to maintain system security. As, such putting SSSC device in service
reduces the operational and investment costs of power system and improve system security
Functional representation of SVS based on Voltage sourced converter
Synchronous voltage source (SVS) for power transfer applications can be implemented by
various static switching power converters. SVS is simply an array of static solid-state switches
operated from dc voltage source by an electronic control so as to produce three phase set of
synchronous sinusoidal output voltages with independently controllable amplitude (V)
and phase angle (). Since the input terminals are dc it is evident that only
active power is generated internally. Therefore SVS can be considered
functionally as an ideal generator that can be operated with a relatively
small dc storage capacitor to exchange reactive power with the ac system with external dc
power supply or energy storage.
Reference P
ref
& Q
ref
correlated parameters such as desired compensating reactive impedance X
ref
& R
ref
define the amplitude V and phase angle B of generated output necessary to exchange
desired active power ( no reactive power ) Q
ref
set to zero and for reactive power ( no active
power) P
ref
set to zero.
The voltage sourced converter based series compensation called static synchronous series
compensation is used for shunt and series compensation as well as transmission angle control.
The operating principle based on the conventional series capacitive compensation. Series
capacitive compensation works by increasing the voltage across the impedance of a physical line,
which in turn increases the line current and transmitted power. Series compensation is used as a
means of reducing the line impedance which means increasing the voltage across the given
physical line. Thus it follows that the same steady state power can be established if series
compensation is provided by synchronous voltage source, whose output precisely matches the
voltage of the series compensator.
V
q
=V
c
= -jX
c
I = -jkXI
V
c
is the injected compensating voltage phasor, I is the line current and X
c
is the reactance of the
series capacitor. X is the line reactance, k=X
c
/X is the degree of the series compensation. SVS is
able to maintain constant compensating voltage in presence of variable line current, or controls
the voltage amplitude injected independent of the amplitude of line current.
V
q
Vr
V
L
P
q
X
L
Vq = j Vq (?) I/I
P
q
= V
2
Sin (d)
(X
l
V
q
/I)
V
L
V
c
V
s
V
s
= V
r
= V
I
Vs
Fig 1(a): Basic two machine system
Basic two machine system with synchronous voltage source replacing the series capacitor is
shown in figure above. By using SVS based SSSC the output voltage can be reversed by simple
control action to make it lead or lag the line current by 90
0
. A generalized expression for the
voltage V
q
can be given by
( ) V jV
q q
t
Where V
q
is the magnitude of the injected compensating voltage (
( ) 0
max
V V
q q
) and
is a chosen control parameter
2.2.2 Advantages of SSSC
The SSSC offers inherent functional characteristics and compensation features, stemming
from the unique attributes of a solid state voltage source, for series line compensation not
achievable by thyristor-controlled series capacitor schemes, these advantages can be summarized
as follows
1It is capable of internally generating a controllable compensating voltage over an
identical capacitive and inductive range independently of the magnitude of the line
current.
11
2With the ability to interface with an external dc power supply it can provide
compensation for the line reactance, , for the purpose of keeping the effective X/R
ratio high, independently of the degree of series compensation.
3With an energy storage highly effective damping of power oscillations is possible by
modulating the series reactive compensation to increase and decrease the transmitted
power and by concurrently alternating virtual positive and negative impedance with
the prevalent machine swing.
2.2.3 Load Flow Modeling of SSSC For Active Power Flow Control
Fig 1(b) Operation of SSSC
Operation principle of SSSC
A SSSC usually consists of a coupling transformer, an inverter, and a capacitor. As shown in Fig.
1(b), the SSSC is series connected with a transmission line through the coupling transformer. It
is assumed here that the transmission line is series connected with the SSSC via its bus . The
active and reactive power flows of the SSSC branch entering the bus are equal to the sending end
active and reactive power flows of the transmission line, respectively. In principle, the SSSC can
generate and insert a series voltage, which can be regulated to change the impedance (more
precisely reactance) of the transmission line. In this way, the power flow of the transmission line
or the voltage of the bus, which the SSSC is connected with, can be controlled
2.2.4 Equivalent circuit and power flow constraints of SSSC
Fig 1(c) Equivalent circuit of SSSC
An equivalent circuit of the SSSC as shown in Fig. 1(c) can be derived based on the operation
principle of the SSSC. In the equivalent, the SSSC is represented by a voltage source V
se
in
series with a transformers impedance. In the practical operation of the SSSC, V
se
can be
regulated to control the power flow of line i-j or voltage of bus i or j. In the equivalent circuit,
V V
i i i
,
V V
j j j
, then the power flow constraints of SSSC are :
By writing KVL around the equivalent circuit,
V I Z V V
se se se
i i ij j j
+ +
(2.1)
( )
V V V
se se
i i j j
I
ij
Z
se
+
(2.2)
( )
S V I
ij i i ij
(2.3)
( ) ( )
( ) ( 4 . 4 S V V V V g j b
s e s e
i j i i i i j j i j i j
+
13
The operating constraint of SSSC (the active power exchange via the DC link ) is
( ) ( )
( )
( ) ( )
Re( ) cos sin
cos sin
V I V V g b
se se se se
ji i ij i ij i
V V g b
se se se
j ij j ij j
_
,
+
In practical applications, the SSSC may be used for control of one of the following parameters:
1) the active power flow of the transmission line, 2) the reactive power flow of the transmission
line, 3) the bus voltage, and 4) the impedance of the transmission line. Therefore, the SSSC may
have four control modes.
Mode 1: Active power flow control
Active power flow control constraint is as follows
0
spec
P P
ji ji
(2.10)
Where
spec
P
ji
is the specified active power flow control reference.
Mode 2: Reactive Power Flow Control
The reactive power flow control constraint is as follows:
0
spec
Q Q
ji ji
(2.11)
Where
spec
Q
ji
is the specified reactive power flow control reference. As mentioned,
, P Q
ji ji
are the SSSC branch active and reactive power flows, respectively, leaving the SSSC bus j while
the sending end active and reactive power flows of the transmission line are
P
ji
and
Q
ji
,
respectively.
Mode 3: Bus Voltage Control
The bus voltage control constraint is given by
0 0
spec spec
V V or V V
i i j j
(2.12)
Where
spec
V
i
and
spec
V
j
are the bus voltage control references
Mode 4: Impedance (reactance) Control
In this mode, V
se
is regulated to control the equivalent reactance of the SSSC to a specified
reactance reference.
0
spec
X X
comp comp
(2.13)
Where
spec
X
comp
is the specified reactance reference. While
X
comp
is a function of the state
variables V
i
, V
j
, V
se
.
Equations (4.10)-(4.13) can be generally written as
( ) ( ) 0
, , , , ,
spec
F x F x F
t
where x V V V
se se
i i j j
1
1
]
Voltage and Current Constraints of the SSSC
The equivalent voltage injection V
se
bound constraints are as follows:
max
0 V V
se se
se
Where
max
V
se
is the voltage rating of
V
se
, which may be constant, or may change slightly with
15
changes in the dc bus voltage, depending on the inverter design.
The current through the series converter of the SSSC should be within its current rating
max
I I
se se
Where
max
I
se
is the current rating of the series converter of the SSSC while
I
se
is the practical
current through the series converter. But, Here, active power flow control mode of SSSC is used
in Newton Raphson load flow Analysis.
Initial voltage magnitude and phase angle parameters of SSSC for Newton-raphson power flow
are as follows:
0
/ 2
se
(2.14)
0
0.1 V
se
(2.15)
2.3 Implementation of active power flow model of SSSC using Newton
power flow method
For the SSSC, the power mismatches, at its buses , respectively, should hold
Where P
k
and Q
k
are respectively, the real and reactive power leaving the bus k ( k=i,j,.).
These are sum of the real and reactive power flows. While P
gk
and Q
gk
are respectively the real
and reactive powers entering the bus k, and P
dk
and Q
dk
are respectively the real and reactive load
leaving the bus k.
For the SSSC, it has only one control degree of freedom since the active power exchange
with the DC link should be zero at any time. A Newton power flow algorithm with simultaneous
solution of power flow constraints and power flow control constraints of the SSSC may be
represented by as follows:
.
.
.... .... .... .... ....
.... ....
.
.
.
.
F F
F F F F
V
V V
j j
se se
i i
PE PE
PE PE PE PE
V
V V
se se j j
i i
P P P P
P P
i i i i
i i
V V
V
se se
i i
j j
Q Q
Q
i i
i
V
se
se i
P P P
j j j
V
se se
i
Q
Q Q
j
j j
V
se
se
.... ....
F
se
V PE
se
P
i i
Q Q Q
V Q
i i i
i i
V V
P
i j j
j j
P P P V Q
j j j j j
V V
i j j
Q Q Q
j j j
V V
i
i j j
1
1
1
1
1
1
1
1 1
1
1 1
1
1 1
1
1 1
1
1 1
1
1 1
1
1 1
1
1 1
1
1
1
1
1
1
1
1
] ]
1
1
1
1
1
1
]
( ) 4.20
1
1
1
1
---------- (2.20)
In (2.20), the system Jacobian matrix is split into four blocks by the dotted line, the bottom
diagonal block has the same structure as that of the system Jacobian matrix of conventional
power flow though the terms of former should consider the contributions from the SSSC. The
other three blocks of the system Jacobian matrix in (2.20) are SSSC related.
4.3.1 Procedure for Newton Raphson power flow with SSSC
The solution procedure for the Newton power flow is summarized as follows:
Step 0: Set iteration count k=0 and initialize the Newton solution
Step 1: Compute
, , , P Q F PE
.
Step 2: If the maximum absolute mismatch of
, , , P Q F PE
is less than a
given tolerance, say 10
-4
pu, output results. Otherwise, go to step 3.
Step 3: Form Newton equation
17
Step 4: Solve Newton equation using gauss-elimination method and obtain the voltage
angle and magnitude correction vector
x
.
Step 5: Update Newton solution by
x x x +
.
Step 6: k=k+1, go to step 1
Where F in this case is P
ji
.Because of SSSC, two rows and two columns are added in the
usual Jacobian of Newton raphson power flow.
2.4 Conclusion
In this chapter different types of FACTs devices and their applications in power systems
are discussed. The static modeling of SSSC for active power flow control is also presented. The
Newton-raphson load flow algorithm using SSSC has been discussed.
3. GENETIC ALGORITHM
Genetic Algorithms (GAs) were invented and developed by John Holland. He invented
genetic algorithm with decision theory for discrete domains. Holland emphasized the importance
of recombination in large populations.
Genetic algorithms are search algorithms based on the mechanics of natural selection and
natural genetics, inspired from the biological evolution, survival of the fittest among string
structures with a structured yet, randomized information exchange with in the population to form
a search algorithm with some of the innovative flair of human search. In every generation a new
set of artificial creatures (strings) created using bits and piece of the old, an occasional new part
is tried for good measure. Being randomized GAs exploit historical information to speculate on
new search points with expecting improved performance. The current literature identifies three
main types of search methods or optimization techniques. They are[11]:
i)Calculus based method
ii)Enumerate method
iii)Random search techniques
Calculus based and enumerative methods are comfortable in their ability to deliver
solutions in applications involving search spaces of limited problem domain. Both methods are
local in scope, the optima they seek are the best in a neighborhood of the current search point.
But in their application to real world of search, which is fraught with discontinuities of functions
and their derivatives and vast multi-modal noisy search spaces, they break down on problems of
even moderate size and complexity. Their inability and inefficiency to overcome the local optima
and reach the global optimum make them insufficiently robust, precluding their application to
complex problems as search method.
On the other hand, random search algorithms managed to overcome the inherent
disabilities of the calculus and enumerative methods. Yet, random schemes that searches and
save the best must also be discounted because of the efficiency requirement. Random searches,
in the long run can be expected to do no better than enumerative schemes. In our haste to
discount strictly random search methods, we must be careful to separate them from randomized
19
techniques.
The randomized search techniques incorporated the basic advantages of random search
but used it only as a tool to guide a more highly exploitative search. In these methods, the search
is carried out randomly and information gained from a search is used in guiding the next search.
Genetic algorithm is an example of such technique, which drew inspiration from the robustness
of nature.
Genetic algorithms in their quest for robustness surpassed their traditional cousins and differ
in some very fundamental ways. GAs are different in the following aspects:
i)GAs work with a coding of the parameter set, not the parameters themselves.
ii)GAs searches from a population of points, not from a single point as in conventional search
algorithms.
iii)GAs uses objective function information, not derivatives or other auxiliary knowledge.
iv)GAs use probabilistic tradition rules but not deterministic rules.
In this chapter, Genetic algorithm and its operators have been discussed in detail. The
problem of optimal power flow using GA is formulated and the algorithm for OPF using GA is
presented up to the level of implementation.
3.2 Phases of Genetic Algorithm
The first step in Genetic Algorithm is the random generation of large number of search
points from the total search space. Each and every point in the search space corresponds to one
set of values for the parameters of the problem. Each parameter is coded with a string of bits.
The individual bit is called gene. The content of each gene is called allele. The total string of
such genes of all parameters written in a sequence is called chromosome. so, there exits a
chromosome for each point in the search space. The set of search points selected and used for
processing is called a population. i.e population is a set of chromosomes. The number of
chromosomes in a population is called population size and the total number of genes in a string
is called string length. The population is evaluated through various operators of GA to
generate a new population. This process is carried out until global optimum point is reached.
Typically it consist of three phases,
i)Generation
ii)Evaluation
iii)Genetic operation
3.2.1 Generation
In this phase number of chromosomes equal to population size is generated and each is of
length equals to string length. The size of population is direct indication of effective
representation of whole search space in one population. The population size affects both the
ultimate performance and efficiency of GA. If it is too small it leads to local optimum solution.
The selection of string length depends on the accuracy and resolution requirement of the
optimization problem. The higher the string length, the better the accuracy and resolution. But
this may lead to slow convergence. Also, the number of parameters in the problem will have a
direct effect on the string length of the chromosome, for a particular resolution and accuracy
requirements the string length is chosen appropriately. The chromosome should in some way
contain the information about solution, which it represents. After the selection of string length
and population size, the initial population is encoded. Most commonly used encoding schemes
are :
a) Binary encoding
In binary encoding every chromosome is a string of bits 0 or 1. The chromosome looks
like
Chromosome 1: 110110010011
Chromosome 2: 110111100001
Each chromosome has one binary string. Each bit in this string can represent some
characteristic of the solution or the whole string can represent a number.
b) Permutation encoding
In permutation encoding every chromosome is a string of numbers, which represent
number in a sequence. Permutation encoding is only useful for ordering problems. The
21
chromosomes in this encoding looks like
Chromosome 1: 1 5 3 2 6 4 7 9 8
Chromosome 2 : 8 5 6 7 2 3 1 4 9
c) Value encoding
Direct value encoding can be used in problems, wher some complicated value, such as
real numbers, is used. Use of binary encoding for this type of problems would be very difficult.
In the encoding, every chromosome is a string of some values. Values can be anything connected
to problem, real numbers or characteristics to some complicated objects. The chromosomes in
this encoding looks like:
Chromosome 1: 1234 5.3243 0.4556 2.3293 2.4545
Chromosome 2: ABDJEIFJDHDIERJFDLDFLFEGT
Value encoding is very good for some special problems. On the other hand, for this
encoding is often necessary to develop some new crossover and mutation specific for the
problem.
Random generation techniques are used in accomplishing this task. Any of the encoding
techniques can be used but binary encoding is mostly used.
Now, the initial population of chromosomes is decoded and all the parameters are
calculated for each chromosome. This results in a set of solutions whose size is equal to
population size.
3.2.2 Evaluation
In the evaluation phase, suitability of each of the solutions from the initial set as the
solution of the optimization problem is determined. For this function called fitness function is
defined. This is used as a deterministic tool to evaluate the fitness of each chromosome. The
optimization problem may be minimization or maximization type. In the case of maximization
type, the fitness function can be a function of variables that bear direct proportionality
relationship with the objective function. For minimization type problems, fitness function can be
function of variables that bear inverse proportionality relationship with the objective function or
can be reciprocal of a function of variables with direct proportionality relation ship with the
objective function. In either case, fitness function is so selected that the most fit solution is the
nearest to the global optimum point. The programmer of GA is allowed to use any fitness
function that adheres to the above requirements. This flexibility with the GA is one of its fortes.
On the whole for a typical optimization problem, evaluation phase consists of calculation
of individual parameters, testing of any equality or inequality constraints that need to be
satisfied, evaluation of objective function, and finally evaluation of fitness from fitness function.
This evaluation is discrete in nature vis--vis some genetic operators which operate on more than
one chromosome at a time.
3.2.3 Genetic operation
In this phase, the objective is the generation of new population from the existing
population with the examination of fitness values of chromosomes and application of genetic
operators. These genetic operators are reproduction, crossover, and mutation. This phase is
carried out if we are not satisfied with the solution obtained earlier. The GA utilizes the notion of
survival of the fittest by transferring the highly fit chromosomes to the next generation of strings
and combining different strings to explore new search points.
3.2.3.1 Reproduction
Reproduction is simply an operator where by an old chromosome is copied into a Mating
pool according to its fitness value. Highly fit chromosomes receive higher number of copies in
the next generation. Copying chromosomes according to their fitness means that the
chromosomes with a higher fitness value have higher probability of contributing one or more
offspring in the next generation.
3.2.3.2 Crossover
It is recombination operation. Here the gene information (information in a bit) contained
in the two selected parents is utilized in certain fashion to generate two children who bear some
of the useful characteristics of parents and expected to be more fit than parents.
There are various techniques that are used for performing this crossover. But first of all we need
to pick up two parents from the existing population to perform crossover. This selection can be
23
done using two methods.
a) Random selection b) Roulette Wheel selection
In the random selection technique, the parents are picked up randomly from the existing
population. In roulette wheel selection technique, selection is usually implemented as a linear
search through roulette wheel with slots weighed in proportion to string fitness values. This is
achieved using the following steps.
i)Total sum of the fitness (fitsum) of all the strings is calculated.
ii)A random real number (rand-sum) between 0 and fitsum is generated.
iii)Starting with the first member of existing population, for each member n the fitness sum
of members 1 to n is compared with the randomly generated number.
iv)If (fitness of member n) > rand-sum, n is selected as parent.
Otherwise the process is continued by incrementing n.
All the above steps are useful in selecting a parent. Therefore, before performing each
crossover, we have to execute the above steps twice. Obviously, through this Roulette wheel
selection we are giving more reproductive chances to those population members that are the fit.
Thus, we are ensuring that the picking of chromosomes as parents is according to their objective
function values. It is important to note that the convergence rates and efficiency of GA with
roulette wheel selection techniques far vis--vis random selection technique. In the roulette
wheel selection technique, still faster rate of convergence can be achieved by sorting the
members of the population in the descending order of their fitness before selecting parents.
Now crossover is carried out using any of the following three methods.
a) Simple or Single Point Crossover
b) Multi-point Crossover
c) Uniform Crossover
a) Single Point Crossover
In this method crossover is carried out at a single point. This is illustrated in the
following example. Let Par1 and Par2 be the two parents selected for crossover. Assume the
strings par1 and par2 as below.
Par 1: 1 1 0 0 0 1 0 1 Par 2: 1 0 1 1 0 1 1 1
Now, a crossover site is selected randomly as an integer between 1 and string length. For
illustration the string length is taken as 8, but in the project work we used 20 as string length. Let
this crossover site is 4. Then children Child 1 and Child 2 are generated as below.
Child 1: 1 2 3 4 5 6 7 8 = 1 1 0 0 0 1 1 1
<- Par1->|<-Par2->
Child 2: 1 2 3 4 5 6 7 8 = 1 0 1 1 0 1 0 1
<- Par2->|<-Par1->
b) Multi Point Crossover
In this method, crossover is performed over the entire length of string of bits. For this a
mask is generated randomly. This mask is nothing but a string of bits of value 0 or 1 and
sizes same as the chromosome string length. Mask acts temporary locations with randomly bits
of value 0 or 1 with random information in the mask; we generate the children as below.
Par 1 : 1 1 0 0 1 0 1 1
Par 2 : 0 1 0 0 0 1 0 0
Mask : 0 0 1 0 1 1 0 1
Child 1 : 1 1 0 0 0 1 1 0 ( If mask=0, Child 1=Par 1 & Child 2=Par 2)
Child 2 : 0 1 0 01 0 0 1 ( If mask=1, Child 1=Par 2 & Child 2=Par 1)
c) Uniform Crossover
In this method, crossover is performed over the entire length of the string of bits. For this,
a mask is generated randomly. This mask is nothing but a string of bits of value 0 or 1 and
sizes same as string length. With the information in the mask, we generate the children as below.
Par1 : 1 1 0 0 1 0 1 1
Par2 : 0 1 0 0 0 1 0 0
Mask : 0 0 1 0 1 1 0 1
Child 1: 1 1 0 0 0 1 1 0 (If mask=0, Child 1= Par 1 & Child 2= Par 2)
Child 2: 01 0 0 1 0 0 1 (If mask=1, Child 1= Par 2 & Child 2= Par 1)
Here we need to generate a mask for each crossover but we dont need to store them, so
number of masks needed is equal to the no of crossover need to be performed. We generate them
25
as and when required and discard them thereafter. Thus we have seen that each crossover
resulted in two children. So the number of crossovers required to be performed for next
generation depends on the number of children we need. Usually it is a general practice to copy
some of the best parents as it is into the next generation the required strings as children. This
phenomenon of copying best parents into the next generation is called Elitism and the number
of parents so copied is indicated by a parameter of GA called Percentage of Elitism (p
e
). This
is nothing but the % of parents so copied of the total number of parents. This Elitism is basically
carried out to not to loose the best strings obtained so far which otherwise may be lost.
In order to control crossover also there is a parameter called Crossover Probability
(P
e
). This probability is used as a decision variable before performing the crossover. This is
done as follows. A random number between 0 and 1 is generated and if that number is less
then P
c
, crossover is performed. The randomly generated number is greater than P
c
, Child1 and
Child2 are directly selected as Par1 and Par2. This is equivalent to the case of crossover where
crossover site is equal to the string length. There are various other techniques too for
implementing the Pc and the programmer of GA is given freedom to choose any one. But the
above technique is mostly used.
3.2.3.3 Mutation
This operator is capable of creation new genetic material in the population to maintain the
population diversity. It is nothing but random alteration of a bit value at a particular bit position
in the chromosome. The following example illustrates the mutation operation.
Original String: 1011001 Mutation site: 4 (assumption)
String after mutation: 1010001
Some programmers prefer to choose random mutation or alternate bit mutation.
Mutation Probability (P
m
) is a parameter used to control the mutation. For each string a
random number between 0 and 1 is generated and compared with the P
m
. if it is less than P
m
mutation is performed on the string. Some times mutation is performed bit-by-bit also instead of
strings. These results in substantial increase in CPU time but performance of GA will not
increase to the recognizable extent. So this is usually not preferred.
Thus obviously mutation brings in some points from the regions of search space which
otherwise may not be explored. Generally mutation probability will be in the range of 0.001 to
0.01. This concludes the description of Genetic Operators.
Now, on the whole the optimization problem that is to be solved using GA is attempted as
follows.
Step 1: Necessary data of the problem is collected and entered as input.
Step 2: Initialization of chromosomes is done.
Step 3: Evaluation and Genetic Operation are performed repeatedly until the convergence is
achieved.
3.3 Types of GAs:
Based on different combinations of operators and strategies, GAs are classified three types.
1. Simple Genetic Algorithm: In this multipoint crossover and mutation are the operators used
and Roulette Wheel Selection is the selection technique.
2. Refined GA: In this uniform crossover and mutation are the operators and Roulette Wheel
Selection is the selection technique. Strategies like Elitism, changing P
C
and P
m
are also
implemented.
3. Crowding GA: This consists of uniform crossover and mutation, random selection
technique and strategies like parent replacement, changing P
c
and P
m
are also
implemented.
However there is no hard and bound restriction that a programmer of GA has to use
operator and strategies of any one type of GA only. He has been given freedom to choose the
operation and strategies in any combination according to his views.
27
4 ATC DETERMINATION USING SSSC
Introduction
In 1988 almost all electric power utilities throughout the world operated with an
organizational model in which one controlling authority the utility operated the generation,
transmission and distribution systems located in a fixed geographical area. Economists for some
time had questioned whether this monopoly organization was efficient. With the example of the
economic benefits to society resulting from the deregulation of other industries such as
telecommunications and airlines, and in a political climate friendly to the notion of deregulation,
the United Kingdom was the first to restructure its nationally owned power system, creating
privately owned companies to compete with each other to sell electric energy. Deregulation
followed in Norway, Australia, and New Zealand, and then, in the 1992 National Energy Policy
Act (NEPA), in the United States. The form of deregulated electric power industry differs in
each country and among various regions in the United States
Due to Deregulation, Power-wheeling transactions have become a very important issue.
Generally, Power wheeling is defined as the power transmitted from a power producer to a
customer through transmission systems and distribution facilities of third party. Since the
transmission facilities have their physical limitation, not all of the power wheeling transaction
can be accepted and carried out in the power market. Thermal limits of transmission facilities,
voltage limits at each bus, reactive power constraints of generating units and net interchange
constraints do limit the feasibility of power transfer. The ability of transmission to carry a
particular transaction from one point to another point is called Available Transfer Capability
(ATC) or the amount of power that can be safely transmitted between two locations in a power
system is called ATC. It includes,
1Normal line overloads and bus voltage limits
2First contingency overload and bus voltage limits
3Limits on the availability of ancillary services to support the transaction
4Transient stability limit.
Power transaction between a specific seller bus/area and a buyer bus/area can be committed only
when sufficient ATC is available for that interface to ensure the system security. The information
about the ATC is to be continuously updated and made available to the market participants
through the Internet-based system such as Open Access Same time Information System
(OASIS).
Method based on multiple load flow runs AC load flow for each increment of transaction
between an interface and checks whether any of the operating conditions such as line flow limit
or bus voltage limit is violated. The minimum out of the two critical transaction values is taken
as the TTC for the system intact condition. ATC for the transmission path is given as,
ATC = TTC Base case power transfer on transmission path.
A number of methods have been reported to date in literature for ATC determination. The DC
load-flow-based methods are a bit faster than their AC counterparts but model only real power
flow (in megawatts) in the lines rather than MVA, and assume the network to be loss free. The
methods based on power transfer /outage distribution factors can cater to only the scenarios that
are too close to the base case from which the factors are derived.
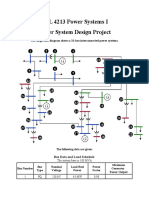
In this chapter, ATC is computed on IEEE-24 bus system and 75-bus Indian system for
different transactions with and with out SSSC and the results were compared by running
repetitive Newton-Raphson load flow for each increment of transaction over its base value until
any of the line flows hit the limiting value.
4.2 Overview of Available Transfer Capability
The ATC of a transmission network has been defined as the unutilized transfer capability
of the transmission network for the transfer of power for further commercial activity, over and
above already committed usage. Power transactions between a specific seller bus/area can be
committed only when sufficient ATC is available for that interface. Thus, such transfer
capability can be used for reserving transmission services, scheduling firm and non-firm
transactions and for arranging emergency transfers between seller bus/areas or buyer bus/areas of
an interconnected power system network. ATC among areas of an interconnected power system
network and also for critical transmission paths between areas are required to be continuously
computed, updated and posted to Open Access Same time Information System (OASIS)
following any change in the system conditions.
29
4.2.1 ATC Definitions
(i) Available Transfer Capability (ATC) is a measure of the transfer capability
remaining in the physical transmission network for further commercial activity over and above
already committed uses. Mathematically, ATC is defined as the Total Transfer Capability (TTC)
less the Transmission Reliability Margin (TRM), less the sum of existing transmission
commitments (which includes retail customer service) and the Capacity Benefit Margin (CBM),
shown in Fig. 4.1.
(ii) Total Transfer Capability (TTC) is defined as the amount of electric power that can
be transferred over the interconnected transmission network in a reliable manner while meeting
all of a specific set of defined pre- and post contingency
system conditions.
Fig. 4.1: Basic Definition of ATC
(iii) Transmission Reliability Margin (TRM) is defined as that amount of transmission
transfer capability necessary to ensure that the interconnected transmission network is secure
under a reasonable range of uncertainties in system conditions.
(iv) Capacity Benefit Margin (CBM) is defined as that amount of transmission transfer
capability reserved by load serving entities to ensure access to generation from interconnected
systems to meet generation reliability requirements.
Mathematically, ATC= TTC-TRM-{ETC+CBM}
4.2.2 Transfer Capability
Transfer capability is the measure of the ability of interconnected electric systems to
reliably move or transfer power from one area to another over all transmission lines (or paths)
between those areas under specified system conditions. The units of transfer capability are in
terms of electric power, generally expressed in megawatts (MW). In this context, area may be
an individual electric system, power pool, control area, sub region, or North American Electric
Reliability Council (NERC) Region, or a portion of any of these. Transfer capability is also
directional in nature. That is, the transfer capability from Area A to Area B is not generally equal
to the transfer capability from Area B to Area A.
4.2.3 Transfer Capability versus Transmission Capacity
Electric systems throughout NERC have agreed to use common terminology to calculate
and report transmission transfer limits to maintain the reliability of the interconnected
transmission networks. These transfer values are called capabilities (differentiating them from
capacities) because they are highly dependent on the generation, customer demand, and
transmission system conditions assumed during the time period analyzed. The electric industry
generally uses the term capacity as a specific limit or rating of power system equipment. In
transmission, capacity usually refers to the thermal limit or rating of a particular transmission
element or component. The ability of a single transmission line to transfer electric power, when
operated as part of the interconnected network, is a function of the physical relationship of that
line to the other elements of the transmission network.
Individual transmission line capacities or ratings cannot be added to determine the
transfer capability of a transmission path or interface (transmission circuits between two or more
areas within an electric system or between two or more systems). Such aggregated capacity
values may be vastly different from the transmission transfer capability of the network. Often,
the aggregated capacity of the individual circuits of a specific transmission interface between
two areas of the network is greater than the actual transfer capability of that interface. In
31
summary, the aggregated transmission line capacities of a path or interface do not represent the
transfer capabilities between two areas.
4.2.4 Limits to Transfer Capability
The ability of interconnected transmission networks to reliably transfer electric power
may be limited by the physical and electrical characteristics of the systems including any one or
more of the following:
i) Thermal Limits Thermal limits establish the maximum amount of electrical
current that a transmission line or electrical facility can conduct over a specified time
period before it sustains permanent damage by overheating or before it violates public
safety requirements.
ii) Voltage Limits System voltages and changes in voltages must be maintained
within the range of acceptable minimum and maximum limits. For example,
minimum voltage limits can establish the maximum amount of electric power that can
be transferred without causing damage to the electric system or customer facilities. A
widespread collapse of system voltage can result in a blackout of portions or the
entire interconnected network.
iii) Stability Limits The transmission network must be capable of surviving
disturbances through the transient and dynamic time periods (from milliseconds to
several minutes, respectively) following the disturbance. All generators connected to
ac interconnected transmission systems operate in synchronism with each other at the
same frequency (nominal frequency is 50 Hertz in India).
Immediately following a system disturbance, generators begin to oscillate relative to each
other, causing fluctuations in system frequency, line loadings, and system voltages. For the
system to be stable, the oscillations must diminish as the electric system attains a new, stable
operating point. If a new, stable operating point is not quickly established, the generators will
likely lose synchronism with one another, and all or a portion of the interconnected electric
systems may become unstable. The results of generator instability may damage equipment and
cause uncontrolled, widespread interruption of electric supply to customers.
4.3 Optimal Placement of SSSC
Even though FACTS devices offer many advantages, their installation cost is high. So,
they need to be placed optimally. This task can be accomplished by considering many factors
like cost, thermal limits of transmission line, reactive power , congestion ,reduction of system
losses, voltage limits and stability limits. Hence, to relieve the congestion, SSSC is placed in
optimal location considering line loading. The objective is to reduce the real power flow
performance index (PI) as given below
2
max
2
1
n
N
P
l w
m lm
PI
n P
m
lm
_
,
0100090000032a0200000200a20100000000a201000026060f003a03574d464301000000000001
001a650000000001000000180300000000000018030000010000006c0000000000000000000000
110000002300000000000000000000002b2a00004214000020454d460000010018030000120000
00020000000000000000000000000000004006000048080000cb0000000d010000000000000000
000000000000c0190300b81b0400160000000c000000180000000a000000100000000000000000
00000009000000100000005203000098010000250000000c0000000e000080250000000c000000
0e000080120000000c00000001000000520000007001000001000000e1ffffff0000000000000000
00000000900100000000000004400022430061006c006900620072006900000000000000000000
00000000000000000000000000000000000000000000000000000000000000000000000000000
000000000120048ae120010000000acb112002caf120052516032acb11200a4ae12001000000014
b0120090b1120024516032acb11200a4ae12002000000049642f31a4ae1200acb1120020000000ff
ffffffec34d100d0642f31ffffffffffff0180ffff01800fff0180ffffffff008800000008000000080000015
200730100000000000000c800000025000000372e90010000020f0502020204030204ef0200a07b
20004000000000000000009f00000000000000430061006c006900620072000000000080e99003
70a060328977faadcc34d100ec44c200d8ae12009c382731040000000100000014af120014af1200
e8782531040000003caf1200ec34d1006476000800000000250000000c000000010000002500000
00c00000001000000250000000c00000001000000180000000c000000000000025400000054000
33
Where
P
lm
is the real power flow
max
P
lm
is the rated capacity of the line-m.
n is the exponent = 2
w
m
is a real non negative weighing factor =1
PI will be small when all the lines are with-in their limits and reach a high value when there are
overloads for a given state of the power system. , the optimal location of FACTS devices can be
effectively decided based on this reduction of real power flow PI.
This chapter presents the active power flow performance index (PI) which is to be
reduced for the optimal placement of SSSC the chromosome of GA contains only active power
flows in the line and location number as control variables.
The objective of GA for optimal location is to reduce the real power flow performance
index (PI), by changing the fitness function to
min 100/ f PI
and applying GA, optimal
placement of SSSC can be found.
4.4 Algorithm for ATC Calculation Using NR Load Flows
(i) a) Read the system line data and bus data
System data: From bus, To bus, Line resistance, Line reactance, half line charging, Off
nominal turns ratio, maximum line flows.
Bus data: Bus no, Bus type, P
gen
, Q
gen
, P
Load
, Q
Load
, P
min
, P
max
, V
sp
shunt capacitance data.
b)Cal P
shed
(i), Q
shed
(i), for i=1 to n
Where P
shed
(i)= P
gen
(i)-P
Load
(i)
Q
shed
(i)= Q
gen
(i)-Q
Load
(i)
c)Form Y
bus
using sparsity technique
d)Set P
ser
=Pij2, obtained by running optimal location program and connect SSSC in the
obtained location i.e from loc variable.
e)e=complex(V
sp
,0);
f)zse=complex(r(loc),x(loc))
g)yse=1/zse
h)t=-angle(yse)/2
i)ese=complex(0.1*cos(t),0.1*sin(t))
j)p1=lp(loc), p2=lq(loc)
(ii) a) k1=1 iteration count
b) Set
0
max
P
and
0
max
Q
) cos( )
1
sin( )
1
n
c Calculate P V V Y
q
i iq iq iq cal
q
n
Q V V Y
q
i iq iq iq cal
q
d) For location with SSSC
gij=real(yse)
35
bij=imag(yse)
vse=real(ese)
fse=imag(ese)
ep=real(E(p1))
fp=imag(E(p1))
eq=real(E(p2))
fq=imag(E(p2))
pser1=gij*(ep*eq+fp*fq)+bij*(fp*eq-ep*fq)
psssc1=gij*(ep*vse+fp*fse)+bij*(fp*vse-ep*fse)
qser1=gij*(fp*eq-ep*fq)-bij*(ep*eq+fp*fq)
qsssc1=gij*(fp*vse-ep*fse)-bij*(ep*vse+fp*fse)
pser2=gij*(ep*eq+fp*fq)+bij*(fq*ep-eq*fp)
psssc2=gij*(eq*vse+fq*fse)+bij*(fq*vse-eq*fse)
qser2=gij*(fq*ep-eq*fp)-bij*(ep*eq+fp*fq)
qsssc2=gij*(fq*vse-eq*fse)-bij*(eq*vse+fq*fse)
pij1=(v(p1)*v(p1)*gij)-pser1-psssc1
qij1=(-v(p1)*v(p1)*bij)-qser1-qsssc1
pij2=(v(p2)*v(p2)*gij)-pser2+psssc2
qij2=(-v(p2)*v(p2)*bij)-qser2+qsssc2
pcal(p1)=pcal(p1)+pij1
qcal(p1)=qcal(p1)+qij1
pcal(p2)=pcal(p2)+pij2
qcal(p2)=qcal(p2)+qij2
PE=-gij*(ep*vse+fp*fse)+bij*(fp*vse-ep*fse)+gij*(eq*vse+fq*fse)- bij*(fq*vse-eq*fse)
( )
) ( ) ( ) ( )
( ) ( ) ( ) 1
0 , 0, 0
2
e Calculate P i P i P i
shed cal
Q i Q i Q i for i ton
shed cal
set P Q Q
pv
slack slack
P P loc Pij
ser
ji
pe PE
)
max max
1 ( )
2 ( )
f Calculate P and Q from P and Q vectors
dp abs P
ji
dp abs pe
2 ) 1
max max
and dp g Is P and Q and dp
If yes go to step (vii) , problem converged case
iii)Form Jacobian elements
a) Initialize A[i][j]=0 for i=1 to 2n+2
j=1 to 2n+2
b) Form diagonal elements for i=1 to n
1 2 i p or i p
2
2
2
2
P
p
H Q B V
pp p pp p
p
P V
p p
N P G V
pp p pp p
V
p
Q
p
M P G V
pp p pp p
p
Q V
p p
L Q B V
pp p pp p
V
p
c) if i= =p1 or i= =p2
2 2
2 2
2 2
2 2
P
p
H Q B V b V
pp p pp p p
ij
p
P V
p p
N P G V g V
pp p pp p p
ij
V
p
Q
p
M P G V g V
pp p pp p p
ij
p
Q V
p p
L Q B V b V
pp p pp p p
ij
V
p
+ +
d) Formation of off diagonal elements
37
( )
( )
sin cos
cos sin
P
p
H V V G B
pq p q pq pq pq pq
q
P V
p q
N V V G B
pq p q pq pq pq pq
V
q
Q
p
M N
pq pq
q
Q V
p q
L H
pq pq
V
q
e) Jacobian elements due to SSSC
gij=real(yse)
bij=imag(yse)
ep=real(E(p1))
fp=imag(E(p1))
eq=real(E(p2))
fq=imag(E(p2))
vse=real(ese)
fse=imag(ese)
A(p1,p2)=-gij*(fp*eq-ep*fq)+bij*(ep*eq+fp*fq)
A(p1,p2+nbus)=-gij*(ep*eq+fp*fq)-bij*(fp*eq-ep*fq)
A(p1+nbus,p2)=gij*(ep*eq+fp*fq)+bij*(fp*eq-ep*fq)
A(p1+nbus,p2+nbus)=-gij*(fp*eq-ep*fq)+bij*(ep*eq+fp*fq)
A(p2,p1)=-gij*(fq*ep-eq*fp)+bij*(ep*eq+fp*fq)
A(p2,p1+nbus)=-gij*(ep*eq+fp*fq)-bij*(fq*ep-eq*fp)
A(p2+nbus,p1)=gij*(ep*eq+fp*fq)+bij*(fq*ep-eq*fp)
A(p2+nbus,p1+nbus)=-gij*(fq*ep-eq*fp)+bij*(ep*eq+fp*fq)
A(p1,2*nbus+1)=-gij*(fp*vse-ep*fse)+bij*(ep*vse+fp*fse)
A(p1,2*nbus+2)=-gij*(ep*vse+fp*fse)-bij*(fp*vse-ep*fse)
A(p1+nbus,2*nbus+1)=gij*(ep*vse+fp*fse)+bij*(fp*vse-ep*fse)
A(p1+nbus,2*nbus+2)=-gij*(fp*vse-ep*fse)+bij*(ep*vse+fp*fse)
A(p2,2*nbus+1)=gij*(fq*vse-eq*fse)-bij*(eq*vse+fq*fse)
A(p2,2*nbus+2)=gij*(eq*vse+fq*fse)+bij*(fq*vse-eq*fse)
A(p2+nbus,2*nbus+1)=-gij*(eq*vse+fq*fse)-bij*(fq*vse-eq*fse)
A(p2+nbus,2*nbus+2)=gij*(fq*vse-eq*fse)-bij*(eq*vse+fq*fse)
A(2*nbus+1,p1)=A(p2,p1)
A(2*nbus+1,p2)=-qij2-(v(p2)*v(p2)*bij)
A(2*nbus+1,p1+nbus)=A(p2,p1+nbus)
A(2*nbus+1,p2+nbus)=pij2-(gij*v(p2)*v(p2))
A(2*nbus+1,2*nbus+1)=A(p2,2*nbus+1)
A(2*nbus+1,2*nbus+2)=A(p2,2*nbus+2)
A(2*nbus+2,p1)=gij*(fp*vse-ep*fse)+bij*(ep*vse+fp*fse)
A(2*nbus+2,p2)=-gij*(fq*vse-eq*fse)-bij*(eq*vse+fp*fse)
A(2*nbus+2,p1+nbus)=-gij*(ep*vse+fp*fse)+bij*(fp*vse-ep*fse)
A(2*nbus+2,p2+nbus)=gij*(eq*vse+fq*fse)-bij*(fq*vse-eq*fse)
A(2*nbus+2,2*nbus+1)=-gij*(fp*vse-ep*fse)-
bij*(ep*vse+fp*fse)+gij*(fq*vse-eq*fse)+bij*(eq*vse+fq*fse)
A(2*nbus+2,2*nbus+2)=-gij*(ep*vse+fp*fse)+bij*(fp*vse-
ep*fse)+gij*(eq*vse+fq*fse)-bij*(fq*vse-eq*fse)
f) Modification of Jacobian elements for slack bus and generator buses
For slack bus
H
pp
= 10
20
L
pp
= 10
20
For PV buses L
pp
= 10
20
g) Form right hand side vector
[ ] [ ] [ ]
( ) ( )
( ) ( ) 1
(2* 1)
(2* 2)
delpq i P i
delpq i n Q i for i ton
delpq nbus P
ji
delpq nbus pe
A X B
+
+
+
Jacobian correction mismatch vector
(iv) Use Gauss-elimination method for solving
39
[ ] [ ] [ ]
A X B
Update the phase angle and voltage magnitudes for i=1 to n
{ }
X
i i i
V V X V
i i i n i
+
+
+
Update SSSC parameters also
2* 1
2* 2
X
se se
nbus
V V X
se se
nbus
_
,
_
,
+
+
+
+
(v) One iteration over
Advance iteration count iter=iter+1
I If (iter>itermax) go to (vi)
Else go to step (ii) (b).
(vi) NR is not converged in itermax iterations
(vii) NR is converged in k1 iterations calculate
a. Line flows
b. Bus powers, Slack bus power.
c. Print the converged voltages, line flows and powers.
(viii) Read the sending bus (seller bus) m and the receiving bus (buyer bus)
n.
(ix) Assume some positive real power injection change tp (=0.1) at seller
bus-m and negative injection tp at the buyer bus-n and form
mismatch vector.
x) Repeat the load flow (i.e., from steps (ii) to (vii)) and from the new
line Flows
check whether any of the line is overloaded. If yes goto next else go
to(ix).
(xi) The maximum possible increment achieved above base-case load at
the sink bus is the ATC.
4.5 Simulation
. The chromosome of GA consists of active power flow in lines and branch location each
of gene length equal to 8 bits.
The reproduction technique used in GA is roulette-wheel selection technique and the
cross over applied is uniform crossover.
GA PARAMETERS (24-BUS)
Population size = 60
Maximum number of generations = 400
Elitism probability = 0.15
Cross over probability = 0.7
Mutation probability = 0.01.
Optimal location for SSSC
Branch no 34
Connected between 19-20
the active power flow of the line came out as 0.439982
Table-1: ATC values based on the line flow limit for 24-bus system (in pu)
S.No. Transacti
on
NRLF with
out SSSC
NRLF with
SSSC
1 22-5 2.48 2.66
2 10-3 2.8 5.15
3 22-9 3.4999 4.79
4 23-15 7.622 7.912
41
5 18-5 2.499 2.782
6 21-6 0.9999 1.069
7 19-5 2.5 2.632
8 10-6 0.9 0.97
GA PARAMETERS (75-BUS)
Population size = 60
Maximum number of generations = 800
Elitism probability = 0.15
Cross over probability = 0.7
Mutation probability = 0.01.
Optimal location for SSSC .
Branch no 46
connected between buses 30 and 57
the active power flow of the line came out as 1.607648
Table-2: ATC values based on the line flow limit for 75-bus Indian system
(in pu)
S.N
o
Transactio
n
NRLF with out
SSSC
NRLF with
SSSC
1 14-5 3.6 4.36
2 8-10 1.7 1.92
3 61-62 4.2 4.75
4 57-59 3.4 3.4
5 2-16 2.2 2.24
6 7-25 1.4 1.4
CONCLUSIONS
In This Thesis Repeated Newton raphson load flow method is used to
compute the ATC values under base case and the results are compared with the
ATC values obtained by placing SSSC optimally in the power system, with the
objective of maximizing the line loading.
From the ATC results for IEEE 24-bus RTS and 75-bus Indian system, it is
observed that for 75-bus Indian system, enhancement of ATC with SSSC is not
convincing, where as for IEEE 24-bus RTS better improvement is observed. For
ATC computation, IEEE 24-RTS and 75-bus Indian system are used.
43
REFERENCES
1) Xing Ping Zhang, Advanced Modeling of the Multicontrol Functional Static
Synchronous Series Compensator (SSSC) in Newton Power Flow, IEEE Transactions
on Power Systems, Vol. 18, No. 4, Nov 2003.
2) G. Hamoud, Assessment of available transfer capability of transmission systems,
IEEE Trans. Power Syst., Vol. 15, pp. 2732, Feb 2000.
3) .M. D. Ilic,Y. T.Yoon, and A. Zobian, Available transfer capacity (ATC) and its value
under open access, IEEE Trans. Power Syst., Vol. 12, pp.636645, Feb1997
4) . G.C. Ejebe, J. G. Waight, M. S-Nieto, and W. F. Tinney, Fast calculation of linear
available transfer capability, IEEE Trans. Power Syst., Vol. 15, pp.1112116, Aug 2000
5) Kalyan K. Sen, SSSC - Static Synchronous Series Compensator: Theory, Modeling, and
Applications, IEEE Transactions on Power Delivery, Vol. 13, No.1, pp 241-246,
January 1998.
6) Narain G.Hingorani, Laszlo Gyugyi, Understanding FACTs, Concepts and technology
of Flexible AC Transmission Systems, IEEE Press.
7) Muwaffaq I. Alomoush, Static Synchronous Series Compensator to Help Energy
Markets Resolve Congestion-Caused Problems, IEEE,pp 25-29,
2004.
8) A.K.David, Dispatch methodologies for open access transmission systems, IEEE
Transactions on Power Systems, Vol. 13, No. 1, pp 46-53, Feb. 1998.
9) .Stephane gerbex "optimal location of facts devices in a powersystem by means of GA"
IEEE TRANSACTIONS ON POWER SYSTEM Vol.16, No.3,AUG 2001
10) Laszlo Gyugyi"SSSC: A solid-state approach to the series compensation of transmission
lines" IEEE TRANSACTION ON POWER DELIVERY,VOL.12, NO.1JAN 1997
APPENDIX
IEEE 24 bus reliability test system
No. of buses: 24
No. of lines: 38
No. of generators: 11
Bus data:
Bus Type P
gen
P
load
P
gmax
Q
gen
Q
load
V
specified
Y
shunt
1 P-V 1.52 1.08 1.92 0 0.22 1.035 0
2 P-V 1.52 0.97 1.92 0 0.2 1.035 0
3 P-Q 0 1.8 0 0 0.37 1 0
4 P-Q 0 0.74 0 0 0.15 1 0
5 P-Q 0 0.71 0 0 0.14 1 0
6 P-Q 0 1.36 3 0 0.28 1 0
7 P-V 0.04 1.25 0 0 0.25 1.025 0
8 P-Q 0 1.71 0 0 0.35 1 0
9 P-Q 0 1.75 0 0 0.36 1 0
10 P-Q 0 1.95 0 0 0.4 1 0
11 P-Q 0 0 0 0 0 1 0
12 P-Q 0 0 0 0 0 1 0
13 Slack 0 0 5.91 0 0 1.02 0
14 P-V 0 0.94 0 0 1.39 1 0
15 P-V 1.55 3.17 2.15 0 0.64 1.014 0
16 P-V 1.55 1 1.55 0 0.2 1.017 0
45
17 P-Q 0 0 0 0 0 1 0
18 P-V 4 3.33 4 0 0.68 1.05 0
19 P-Q 0 1.81 0 0 0.37 1 0
20 P-Q 0 1.28 0 0 0.26 1 0
21 P-V 4 0 4 0 0 1.05 0
22 P-V 3 0 3 0 0 1.05 0
23 P-V 6.6 0 6.6 0 0 1.05 0
24 P-Q 0 0 0 0 0 1 0
Line data :
Line From
bus
To
bus
R X Half line
charging
Susceptance
Tap
ratio
Max
power
1 1 2 0.0026 0.0139 0.23055 1 1.75
2 1 3 0.0546 0.2112 0.0286 1 1.75
3 1 5 0.0218 0.0845 0.01145 1 1.75
4 2 4 0.0328 0.1267 0.01715 1 1.75
5 2 6 0.0497 0.192 0.026 1 1.75
6 3 9 0.0308 0.119 0.0161 1.015 4
7 3 24 0.0023 0.0839 0 1 1.75
8 4 9 0.0268 0.1037 0.01405 1 1.75
9 5 10 0.0228 0.0883 0.01195 1 1.75
10 6 10 0.0139 0.0605 1.2295 1 1.75
11 7 8 0.0159 0.0614 0.0083 1 1.75
12 8 9 0.0427 0.1651 0.02235 1 1.75
13 8 10 0.0427 0.1651 0.02235 1.03 4
14 9 11 0.0023 0.0839 0 1.03 4
15 9 12 0.0023 0.0839 0 1.015 4
16 10 11 0.0023 0.0839 0 1.015 4
17 10 12 0.0023 0.0839 0 1 5
18 11 13 0.0061 0.0476 0.04995 1 5
19 11 14 0.0054 0.0418 0.04395 1 5
20 12 13 0.0061 0.0476 0.04995 1 5
21 12 23 0.0124 0.0966 0.1015 1 5
22 13 23 0.0111 0.0865 0.0909 1 5
23 14 16 0.005 0.0389 0.0409 1 5
24 15 16 0.0022 0.0173 0.0182 1 5
47
25 15 21 0.0063 0.049 0.0515 1 5
26 15 21 0.0063 0.049 0.0515 1 5
27 15 24 0.0067 0.0519 0.05455 1 5
28 16 17 0.0033 0.0259 0.02725 1 5
29 16 19 0.003 0.0231 0.02425 1 5
30 17 18 0.0018 0.0144 0.01515 1 5
31 17 22 0.0135 0.1053 0.1106 1 5
32 18 21 0.0033 0.0259 0.02725 1 5
33 18 21 0.0033 0.0259 0.02725 1 5
34 19 20 0.0051 0.0396 0.04165 1 5
35 19 20 0.0051 0.0396 0.04165 1 5
36 20 23 0.0028 0.0216 0.02275 1 5
37 20 23 0.0028 0.0216 0.02275 1 5
38 21 22 0.0087 0.0678 0.0712 1 5
75-Bus Indian System
No.of buses : 75
No.of lines : 97
No.of generators :15
Bus data :
Bus Type P
gen
P
load
Q
gen
Q
load
V
specified
Shunt
admittanc
e
1 Slack 7.25 0 0 0 1.03 0
2 P-V 2.6 0 0 0 1.05 0
3 P-V 1.8 0 0 0 1.03 0
4 P-V 1 0 0 0 1.05 0
5 P-V 1.8 0 0 0 1.05 0
6 P-V 1.2 0 0 0 1.05 0
7 P-V 0.6 0 0 0 1.05 0
8 P-V 0.8 0 0 0 1.05 0
9 P-V 5.5 0 0 0 1.05 0
10 P-V 0.8 0 0 0 1.02 0
11 P-V 1.09 0 0 0 1.02 0
12 P-V 18.0 0 0 0 1.05 0
13 P-V 9.0 0 0 0 1.05 0
14 P-V 1.5 0 0 0 1.03 0
15 P-V 4.54 0 0 0 1.01 0
16 P-Q 0 -0.5869 0 0.2756 1 0
17 P-Q 0 0 0 0 1 -0.90703
18 P-Q 0 0 0 0 1 0
19 P-Q 0 0 0 0 1 -0.45351
20 P-Q 0 1.5637 0 0.3393 1 0
21 P-Q 0 0 0 0 1 0
22 P-Q 0 0 0 0 1 -0.45351
23 P-Q 0 0 0 0 1 -0.90703
24 P-Q 0 2.2795 0 0.4053 1 0
25 P-Q 0 2.1048 0 0.4343 1 0
26 P-Q 0 0 0 0 1 -1.4785
27 P-Q 0 3.06 0 0.407 1 0
28 P-Q 0 1.2775 0 0.2835 1 0
29 P-Q 0 0 0 0 1 -0.45351
49
30 P-Q 0 2.2646 0 0.4424 1 0
31 P-Q 0 0 0 0 1 0
32 P-Q 0 0.7811 0 0.1159 1 0
33 P-Q 0 0 0 0 1 0
34 P-Q 0 0.817 0 0.8384 1 0
35 P-Q 0 0 0 0 1 -0.45351
36 P-Q 0 0 0 0 1 -0.45351
37 P-Q 0 1.4428 0 0.4093 1 0
38 P-Q 0 0 0 0 1 0
39 P-Q 0 0.8512 0 0.2946 1 0
40 P-Q 0 0 0 0 1 0
41 P-Q 0 0 0 0 1 -2.0227
42 P-Q 0 10 0 0 1 -0.57143
43 P-Q 0 0 0 0 1 0
44 P-Q 0 0 0 0 1 0
45 P-Q 0 0 0 0 1 0
46 P-Q 0 1.5632 0 0.8336 1 0
47 P-Q 0 0.7455 0 0.0877 1 0
48 P-Q 0 0.5083 0 0.1397 1 0
49 P-Q 0 0.8572 0 0.5158 1 0
50 P-Q 0 2.021 0 0.7494 1 0
51 P-Q 0 0.5776 0 0.0062 1 0
52 P-Q 0 0.9827 0 -0.1815 1 0
53 P-Q 0 0.8263 0 -0.0033 1 0
54 P-Q 0 1.6195 0 0.29 1 0
55 P-Q 0 2.7423 0 0.3108 1 0
56 P-Q 0 1.4028 0 0.3432 1 0
57 P-Q 0 1.5278 0 0.1853 1 0
58 P-Q 0 0.9419 0 0.1129 1 0
59 P-Q 0 1.2189 0 0.1101 1 0
60 P-Q 0 0.742 0 0.0742 1 0
61 P-Q 0 1.065 0 0.0658 1 0
62 P-Q 0 1.0018 0 0.1813 1 0
63 P-Q 0 0.5801 0 0.0531 1 0
64 P-Q 0 0.5679 0 0.1333 1 0
65 P-Q 0 1.4784 0 0.1281 1 0
66 P-Q 0 0.3174 0 0.1518 1 0
67 P-Q 0 0.9643 0 0.1055 1 0
68 P-Q 0 0.4287 0 0.336 1 0
69 P-Q 0 0.5594 0 0.3253 1 0
70 P-Q 0 0.2334 0 0.023 1 0
71 P-Q 0 0.9173 0 0.2136 1 0
72 P-Q 0 0.5252 0 0.1176 1 0
73 P-Q 0 4.47 0 0 1 -0.45351
74 P-Q 0 2.88 0 0 1 -2.4762
75 P-Q 0 -4.44 0 0 1 0
Line data :
Line From
bus
To bus R X Half line
charging
Susceptance
Tap
ratio
Max
power
51
1 19
20
0.0006
5
0.0260
4 0 1
4.8
2 16
2
0.0012
3
0.0246
9 0 1
4.72
3 18
3 0
0.0291
7 0 1
4.8
4 17
16
0.0006
5
0.0260
4 0 1
4.8
5 17
1
0.0007
3 0.0146 0 1
9.9
6 22
25
0.0006
5
0.0260
4 0 1
4.8
7 23
24
0.0006
5 0.026 0 1
5.1
8 26
27
0.0006
5
0.0260
4 0 1
4.8
9 28
4
0.0030
6
0.0613
5 0 1
1.85
10 29
30
0.0004
3
0.0173
6 0 1
7.2
11 31
5
0.0023
5 0.0471 0 1
2.76
12 32
6
0.0051
4
0.1028
5 0 1
2.5
13 33
7
0.0054
9
0.1097
8 0 1
2
14 34
8 0 0.0486 0 1
2.5
15 35
9
0.0004
9
0.0194
3 0 1
7.2
16 36
37
0.0006
5
0.0260
4 0 1
4.8
17 38
39 0.0013
0.0520
8 0 1
2.4
18 24
10
0.0024
3 0.0486 0 1
2.5
19 40
11 0.0077 0.0272 0 1
3.75
20 41
12
0.0001
6
0.0059
1 0 1
20.5
21 42
13 0.0003
0.0119
9 0 1
11.76
22 43 14 0 0.0284 0 1 5.28
1
23 44
15 0
0.0227
3 0 1
6.6
24 45
44
0.0005
6
0.0222
2 0 1
6.3
25 16
46 0.0081 0.0388 0.1403 1
3
26 16
50
0.0099
3
0.0474
6 0.38643 1
4.2
27 17
19
0.0046
8 0.0477 0.6295 1
5
28 17
23
0.0078
5 0.0799 1.04738 1
5
29 23
29
0.0080
6
0.0816
9 1.06808 1
5
30 20
64 0.0183 0.0927 0.0739 1
2.5
31 19
26
0.0029
4
0.0299
7 0.39206 1.000
05.50
32 47
50
0.0109
3
0.0522
1 0.18892 1
3
33 35
41
0.0003
1 0.0031 0.04056 1
6
34 47
67
0.0066
2
0.0316
4 0.11451 1
3
35 24
27
0.0050
5
0.0241
6 0.0873 1
3
36 24
54
0.0129
1
0.0617
1 0.22327 1
5
37 27
51 0.016 0.081 0.0644 1
3
38 51
52 0.0155 0.0794 0.063 1
2.5
39 25
60 0.0166 0.0843 0.0672 1
2.5
40 25
43 0.0127 0.0641 0.0522 1
2.5
41 34
54 0.0177 0.0851 0.3026 1
3
42 54
28 0.0106 0.0506 0.1832 1
3
43 28
43 0.0058 0.029 0.0237 1
1.8
44 28
56 0.0037 0.0178 0.0322 1
3
45 56 30 0.0049 0.0237 0.0859 1 3
53
46 30
57 0.0075 0.0384 0.0311 1
2.8
47 53
30
0.0067
9
0.0341
2 0.02782 1
2.8
48 53
61
0.0066
6 0.0339 0.02672 1
2.5
49 30
61 0.0144 0.0731 0.0585 1
2.5
50 57
58 0.0067 0.0339 0.0267 1
2.8
51 57
59
0.0058
3
0.0295
6 0.02346 1
2.8
52 59
39 0.0141 0.0718 0.057 1
2.25
53 39
31 0.0144 0.0725 0.059 1
2.5
54 39
33
0.0070
5 0.0359 0.114 1
3
55 54
63 0.0099 0.0509 0.0401 1
2.5
56 55
63 0.0078 0.0398 0.0314 1
2.8
57 61
62 0.0116 0.0583 0.0475 1
2.5
58 62
32 0.0069 0.035 0.1126 1
3
59 31
32 0.0005
0.0025
3 0.00805 1
3.6
60 35
36
0.0047
9 0.0488 0.63614 1
5
61 46
37
0.0173
2
0.0878
4 0.06982 1
2.5
62 19
36
0.0025
4
0.0258
4 0.33796 1
5
63 17
35
0.0005
1
0.0051
7 0.0676 1
6
64 20
40 0.0058 0.0294 0.0942 1
3
65 40
48 0.0083 0.0424 0.0334 1
2.5
66 74
41
0.0092
7
0.0942
9 0.23293 1
7.2
67 74
41
0.0083
3
0.0847
8 1.10855 1
7.2
68 74 73 0.0055 0.0568 0.74354 1 5
9 6
69 26
22 0.0065
0.0661
7 0.86521 1
5
70 29
22 0.0026
0.0264
6 0.3461 1
5.5
71 26
41
0.0082
3
0.0837
5 0.09553 1
4
72 48
49 0.0093 0.0475 0.0374 1
2.5
73 49
40 0.0133 0.0668 0.0542 1
2.5
74 38
29 0.0037
0.0376
2 0.4887 1
5.5
75 38
22
0.0032
5
0.0330
7 0.43264 1
5.5
76 18
47
0.0043
7
0.0255
2 0.09399 1
4.6
77 30
65
0.0024
8
0.0118
6 0.04294 1
4.6
78 41
42
0.0003
1 0.0031 0.04056 1
6
79 42
74
0.0091
8
0.0930
6 1.2168 1
5
80 20
66
0.0132
5
0.0666
7 0.05416 1
2.5
81 23
74
0.0001
5
0.0015
5 0.02704 1
12
82 24
67
0.0012
4
0.0059
3 0.02147 1
3.6
83 18
68
0.0033
6
0.0196
3 0.01858 1
2.8
84 18
71
0.0134
4
0.0785
2 0.0723 1
2.7
85 27
68
0.0134
4
0.0785
2 0.0723 1
2.7
86 27
71
0.0033
6
0.0196
3 0.01808 1
2.8
87 25
72
0.0159
8
0.0810
8 0.06436 1
2.5
88 43
58
0.0131
5
0.0669
6 0.05778 1
2.5
89 39
31 0.0144 0.0725 0.059 1
2.5
55
90 43
56
0.0049
9
0.0239
7 0.08523 1
3
91 55
44
0.0099
8
0.0239
7 0.34092 1
5
92 73
45
0.0012
1
0.0110
9 0.72815 1
10
93 29
75
0.0005
1
0.0051
7 0.0676 1
6
94 37
69
0.0121
2 0.061 0.04956 1
3
95 70
72
0.0087
8 0.0443 0.0358 1
2.8
96 21
65
0.0008
3
0.0039
6 0.01431 1
3.5
97 21
30
0.0069
5 0.035 0.02843 1
2.5
Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Machine Learning and Big Data Analytics in Power Distribution SystemsDokument54 SeitenMachine Learning and Big Data Analytics in Power Distribution SystemsKailash KumarNoch keine Bewertungen
- ETAP Calculation DG Input Data For All Electrical Equipments On ETAP and SLDDokument49 SeitenETAP Calculation DG Input Data For All Electrical Equipments On ETAP and SLDmohammadkassarNoch keine Bewertungen
- Psa Lab ManualDokument72 SeitenPsa Lab ManualLala Mosa100% (1)
- Brown Book Load Flow Analysis - Base Condition Result PDFDokument20 SeitenBrown Book Load Flow Analysis - Base Condition Result PDFyashida0% (1)
- Real Time Control of System Voltage and Reactive PowerDokument16 SeitenReal Time Control of System Voltage and Reactive PowerjhongeralpeNoch keine Bewertungen
- ERPC Op - LFA Summer Peak R0 - 21.09.2017Dokument199 SeitenERPC Op - LFA Summer Peak R0 - 21.09.2017Laloui TayebNoch keine Bewertungen
- Lec 1Dokument15 SeitenLec 1KITS WNoch keine Bewertungen
- Ee 6501 Power System Analysis Two MarksDokument17 SeitenEe 6501 Power System Analysis Two Markskrishnandrk100% (1)
- Paper Four Winding Transformers Part IDokument13 SeitenPaper Four Winding Transformers Part IAnielaNoch keine Bewertungen
- EC - PSLF - Modeling of GE Solar Photovoltaic Plants For Grid Studies - GE - Solar - Modeling-V1-1Dokument36 SeitenEC - PSLF - Modeling of GE Solar Photovoltaic Plants For Grid Studies - GE - Solar - Modeling-V1-1techtricNoch keine Bewertungen
- Psa 2 MarksDokument42 SeitenPsa 2 MarkskrishnandrkNoch keine Bewertungen
- Chapter 15 - Load Flow AnalysisDokument41 SeitenChapter 15 - Load Flow AnalysisegiNoch keine Bewertungen
- Bus Operations: Classification of Buses Bus Injection Bus Arrangements and ConfigurationsDokument19 SeitenBus Operations: Classification of Buses Bus Injection Bus Arrangements and ConfigurationsCrestNoch keine Bewertungen
- Optimal Load Flow With Steady-State SecurityDokument8 SeitenOptimal Load Flow With Steady-State SecurityBar AvaitNoch keine Bewertungen
- ABB PMS SolutionsDokument5 SeitenABB PMS Solutionsdennisraj1Noch keine Bewertungen
- Improve Power Stability & Damping Oscillation in Multi Machine System Using (SSSC) With POD ControllerDokument8 SeitenImprove Power Stability & Damping Oscillation in Multi Machine System Using (SSSC) With POD ControllerDrAshok Kumar TiwariNoch keine Bewertungen
- Power Flow AnalysisDokument10 SeitenPower Flow AnalysisYusuf KayaNoch keine Bewertungen
- Real European Low Voltage Test Network For Smart Grid ApplicationsDokument100 SeitenReal European Low Voltage Test Network For Smart Grid ApplicationsDavid Jose Poma GuillenNoch keine Bewertungen
- FACTS Devices: and Effect of UPFC On 500 KV Transmission SystemDokument78 SeitenFACTS Devices: and Effect of UPFC On 500 KV Transmission SystemLaeeq Ahmad FaizNoch keine Bewertungen
- Hapter Ower System AnalysisDokument457 SeitenHapter Ower System AnalysisvincentNoch keine Bewertungen
- SEN and UPFCDokument11 SeitenSEN and UPFCshayanshayanNoch keine Bewertungen
- Voltage Stability in Electrical Power SystemsDokument33 SeitenVoltage Stability in Electrical Power Systemsquangspkt100% (1)
- Spd-Cal-003-105 - Load Flow Study - Rev 1Dokument31 SeitenSpd-Cal-003-105 - Load Flow Study - Rev 1Muhammad Nu'man0% (1)
- Power System Design ProjectDokument6 SeitenPower System Design Projectvpzfaris0% (1)
- Power SystemsDokument92 SeitenPower SystemsJhon CenaNoch keine Bewertungen
- The Optimization and Cost Recovery The Reactive Power in Power MarketDokument5 SeitenThe Optimization and Cost Recovery The Reactive Power in Power Marketapi-3697505Noch keine Bewertungen
- Design Simulation and Construction of An IEEE 14-Bus Power SystDokument42 SeitenDesign Simulation and Construction of An IEEE 14-Bus Power Systsowmya beraNoch keine Bewertungen
- Training PDFDokument1.164 SeitenTraining PDFMohammed Abdelsalam0% (1)
- Control and Analysis of Unified Power Flow ControllerDokument32 SeitenControl and Analysis of Unified Power Flow ControllerTesfahun GirmaNoch keine Bewertungen
- Power Loss Reduction by PV-PQ Buses ConversionDokument70 SeitenPower Loss Reduction by PV-PQ Buses ConversionAkinbode Sunday OluwagbengaNoch keine Bewertungen