Beruflich Dokumente
Kultur Dokumente
Axe 10
Hochgeladen von
bleua1Originalbeschreibung:
Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Axe 10
Hochgeladen von
bleua1Copyright:
Verfügbare Formate
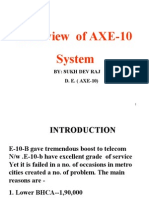
Quetta Telecom College Quetta
AXE-10 DIGITAL
SSS IOG
RP . RP . RP
GS
TSS CCS
. RP . RP
CP-A
CP-B
EXCHANGE
Quetta Telecom College Quetta
AXE Survey
THE AXE 10 DIGITAL SWITCHING SYSTEM
AXE 10 is a multiapplication, openended digital switching system for public telecommunications networks. It has realtime processing capacity and can handle high volumes of traffic. AXE 10 supports a wide range of applications the major applications are: PSTN ISDN PLMN Business Communications. Overlaying these networks are Intelligent Network (IN) and Signalling Networks AXE 10 provides functionality at different levels in these networks. AXE 10 can be deployed as: Local Exchange handling PSTN and ISDN Transit / International Exchanges for PSTN and ISDN Switching nodes in the PLMN (as Mobile Services Switching Centre or MSC) Database in the PLMN (for example, Home Location Register or HLR). Operator Exchanges (OPAX) Nodes providing business communications (BG or Centrex) Signalling Transfer Points (STP) for advanced signalling systems Intelligent Network (IN) nodes for service switching and/or service control for the provision of IN services such as Free phone. Based on the list given above AXE 10 can be regarded as a number of platforms capable of supporting various mixes of applications. Such platforms are called Product Lines.
CHARACTERISTICS OF AXE 10
The key to the success of AXE 10 is its unique flexibility and modularity. Modularity allows AXE 10 to readily adapt to the requirements of the network and of end- users. Modularity is implemented in a number of ways in AXE-I 0: Functional modularity Software modularity Hardware modularity Technological modularity Application modularity
Functional Modularity
AXE 10 is designed in such a way that nodes with different functions can be generated from the same system. This can be achieved due to software and hardware modularity.
Software Modularity
AXE 10 is built up as a set of independent building blocks (known as function blocks), each performing a specific function and communicating with each other by means of defined
Quetta Telecom College Quetta
signals and interfaces. Software modularity means that function blocks can be added, deleted or modified without requiring changes or recompilation of other parts of the system.
Hardware Modularity
The packaging of AXE 10 offers a high degree of flexibility. The packaging system contributes to ease of handling during design, manufacturing, installation and operation and maintenance. The basic building blocks of the packaging system are the Printed Circuit Boards and the containers for these boards, Magazines. The Printed Circuit Boards can be replaced or removed without disturbing other equipment.
Technological Modularity
AXE 10 is an openended switching platform. This allows new technologies and functions to he added which allow the continuous development of AXE 10.
Application Modularity
Recent software development in AXE 10 have focused on enhancements of the software architecture and the utilization of new programming techniques to reduce application development time and handle more complex applications more efficiently. One of these developments is the concept of AM. AM shortens the time frame for the delivery of systems, enables added functionality within the same node and allows flexibility in terms of combinations of applications provided. Modularity has been mentioned earlier (functional, software, hardware, technological). AM introduces a new layer of modularity at the application level. In AM the specific software which supports each application is organized into separate application-oriented modules. One of these Application Modules, for example, contains the software which controls access in ISDN. These Application Modules then share a common set of hardware and software resources (for example, switching hardware and software). Access to these resources is controlled by a Resource Module Platform (RMP). RMP also manages communications between Application Modules. AM supports more rapid development and roll out of new application as well as the possibility of combining multiple applications within a single AXE node. It also achieves easier portability of functions and applications and has entailed enhancements in the design process, for example, the introduction of new object-oriented design techniques.
Quetta Telecom College Quetta
MAIN STRUCTURE OF AXE
System Structure
AXE is a Stored Program Control (SPC) exchange, that is, software programs, stored in a computer control the operation of the switching equipment. AXE Hierarchy The AXE is structured hierarchically into a number of functional levels. At the highest level AXE is divided into two parts APT: the switching part which handles all of the telecommunications switching functions. APZ: the control part which contains the software programs required to control the operation of the switching part. APT and APZ are in turn divided into subsystems, each of which has a specific function. Each subsystem is designed with a high degree of autonomy and is connected to other subsystems via standard interfaces. The name of each subsystem reflects its function. For example, the Trunk and Signalling Subsystem (TSS) is responsible for signalling and supervision of connections (trunks) to other exchanges. Each subsystem is divided into function blocks. This division is also function related, with the name of the function block reflecting its function. For example, BT is the Bothway Trunk function block which handles a trunk line carrying traffic in both directions between exchanges. At the lowest functional level, a function block is divided into function units. A function unit can he either hardware or software.
Quetta Telecom College Quetta
Software Structure and Interworking with Hardware
Function blocks can be either software and hardware, or software only. The Figure shown below is an example of a function block, LI3, with hardware and software. (LI3 is used to handle the subscriber interface towards the exchange). Software units are divided into two types: A regional software unit which directly controls the hardware. A central software unit which typically handles any complex or administrative functions. Each software unit contains programs and data and is programmed, tested and loaded as a separate independent unit.
Standardized software signals handle all communications or interlocking between function blocks. For security and reliability this interlocking typically takes place at central software level.
Processors in AXE
Processing in AXE is handled by the control part of AXE - the APZ. The processor structure is distributed, with a powerful Central Processor (CP) which handles the complex decision making tasks, mainly of an analytical or administrative nature, and a large number of Regional Processor (RP) which carry out the simple, routine tasks. However, as RPs become more powerful, they will perform more complex tasks. The RPs and CP communicate using a bus called the RP Bus ( RPB). The APZ also contains Support Processors (SP) which handles manmachine communication, file management and data communications.
Quetta Telecom College Quetta
The CP is duplicated - the twin processors work in parallel synchronous mode. A unit called the Maintenance Unit (MAU) helps the operation of the CP and takes appropriate action if faults occur. The RPs control the switching hardware, which is arranged into groups, called Extension Modules (EM). An RP can control a number of EMs. The EMs are connected to the RP via an EM Bus (EMB). An EM can be a magazine with Printed Circuit Boards (PCB) or one board can have more than one EMs on it.
Processor Reliability in AXE
The Central Processors operate synchronously according to the Executive/Standby principle, that is, only one processor (referred to as Executive) controls the system at a time. The other processor (referred to as Standby) takes over control instantly in the event of a fault. The Regional Processors ( RP) may also he duplicated. The RPs operate according to the Load-Sharing principle, that is, each RP in an RP pair controls one half of the EMs. In the event of a fault in an RP, the other RP (referred to as the twin RP) takes over control of the affected equipment.
Quetta Telecom College Quetta
Central Processors in AXE Different Versions of Central Processors are available in AXE, depending on the data and trafficprocessing requirements of an exchange.
We will now briefly look at the APT subsystem EMs, following by the APZ subsystems.
APT The Switching Part of AXE
APT handles all AXE switching functions in AXE. It contains switching hardware which handles basic functions such as conversion of analogue signals to digital signals, call concentration and switching. It also contains traffic-handling software for the more complex functions such as traffic statistics measurement, routing and analysis. Subsystems in APT APT is divided into subsystems. These subsystems can be combined into groupings to match the requirements of different Product Lines and markets. A complete listing of subsystems is shown in the following table.
Quetta Telecom College Quetta
APZ The Control Part of AXE
APZ, with its powerful data processing capabilities, provides a reliable and flexible control platform for AXE.
Subsystems in APZ
APZ, like APT, is divided into subsystems. These are of two types: Control subsystems - the Central Processor Subsystem (CPS), the Maintenance Subsystem (MAS), Database Management Subsystem (DBS) and the Regional Processor Subsystem (RPS). Input / Output subsystems are Support Processor Subsystem (SPS), the Man-machine Communication Subsystem (MCS), the File Management Subsystem (FMS), the Data Communication Subsystem (DCS) and the Open Communication Subsystem (OCS). Subsystem CPT DBS DCS FMS MAS MCS RPS SPS Name Central Processor Subsystem Data Base Management Subsystem Data Communication Subsystem File Management Subsystem Man Machine Subsystem Man Machine Communication Subsystem Regional Processor Subsystem Support Processor Subsystem
Quetta Telecom College Quetta
APT The Switching Part
Quetta Telecom College Quetta
THE DIGITAL SUBSCRIBER STAGE
The subscriber stage is sub divided into EMGs. Maximum 2048 subscribers can be connected with one EMG. One EMG requires one RP pair for connection with CP. The RP type used for EMGs in case of SSS is called RPBC (Regional Processor Bus Converter) and in case of RSS these functions are performed by STR (at remote side) and STC (at exchange side). EMG is divided into EMs (Extension Modules). The EMs having subscribers are called LSMs (Line Switch Module). In one EMG there can be 16 LSMs and in one LSM there can be max. 128 subscribers. One LSM magazine has the following equipment.
LIB (Line Interface Board) There can be 4 or 8 LICs on one LIB i.e.4/8 subscribers can be connected with one LIB. KRC (Key set Code Receiver Circuit) Optional This is used for digit reception in case of DTMF set and to send dial tone. There can be 8 devices in one LSM on one board. SLCT (Subscriber Line and Circuit Tester) For testing of LIC and subscriber line. EMRP The regional software for the subscriber stage is stored and executed in this processor. All the boards having DP (Device Processor) are connected with EMRP via DEVCB at back plane. All the EMRPs are connected with RPBC through EMRPB. JTC/ETB These Boards are used for connection to the GS (Group Switch) at a rate of 2M bit/sec. JTC Board is used in case of SSS and ETB in case of RSS. TSB (Time Switch Bus) Time switch Bus is used to interconnect the LSMs. Due to this Bus it is possible to use devices of other LSMs in case the KRC devices are not present in any LSM. On this Bus 512 Time slots are available for speech connection, so 256 calls can be connected within one EMG. EMTS: EMTS is the TSW for switching inside one EMG. This is used for interconnection of devices within LSM and also to other LSMs within same EMG. All internal devices are connected with it on DEVSB (Device Speech Bus) at back plane. All LSMs are connected with EMTS through TSB. It provides speech path within EMG and also to GS. The speed of Bus is more than 12 MHz. The speech store contains 768 (512 + 128 + 128) positions. The device speech Bus is divided into two buses - DEVSB-0 and DEVSB-1. The different devices connected to EMTS are as follows: DEVSB-0 DEVSB-1 JTC/ETB 32 channels ETB/JTC 32 channels. LIB 64 channels LIB 64 channel. KRC 8 channels SLCT 4 channel.
Quetta Telecom College Quetta
In Case of RSS: ETB will be connected to ETC in Exchange for onward connection to the GS. RPBC is spited in to STR & STC at remote side STR will extract signalling information from ETB Time Slot 16 and connect it to the EMRP via EMRP Bus on Exchange side STC will extract the time slot 16 and will send this to CP.
Other Equipment in EMG
SEPRM (Special Equipment Private Meter) Several different types of magazines are available for control of private meters. For private meters of type 12/16 kHz there is a magazine with the capacity of 64 subscriber lines using private meters. ACCS, Access Selector This magazine is used to connect external measuring devices for measurement e.g. on subscriber lines. The ACCS is a relay matrix with 8 outlets (for 8 different EMGs) and 4 inlets (instruments). SULT This magazine is used in Remote Subscriber Switches and it contains a unit for Subscriber Line Test (SULT) and a board for sending a howler tone. There is also a V24 interface board for connection of an I/O terminal as well as a board for external alarms. SEPRM, Special Equipment Coin Box This magazine is used to control up to 32 coin boxes of polarity reversal type. There is also a 425 Hz tone generator in the magazine. ATL, Autonomous Traffic at Line failure In case of link failure between the host exchange and the RSS, the ATL block implements the function referred to as the Stand Alone Function. This means the internal traffic within the RSS in still possible without having access to the software in the Central Processor (which normally controls all the actions in the RSS). ATL consists of central software and regional software which is loaded per EMRP in the RSS. ATL keeps track of the configuration in RSS and changes in subscriber data. At regular intervals, the regional software of ATL is updated with the changed information thanks to this updating function. It is possible for the block to deal with the traffic handling during the stand-alone state. One can say that the ATL is replacing the Traffic Control Subsystem during the link failure. No charging of the calls takes place during this state and no subscriber services can be changed or used. For emergency numbers, e.g., the fire brigade, it is possible to define LI-devices used as outlets. Such an outlet could be local police station. It is also possible to connect a radio circuit to this outlet for maximum security. See figure below.
Quetta Telecom College Quetta
GROUP SWITCHING SUBSYSTEM
Group Switch The Group Switching Subsystem (GSS) performs switching between time-multiplexed buses and sets up paths between telecommunications devices. It also provides timing signals for its own synchronization and for network synchronization. The GSS consists of both hardware and software, and it works with other subsystems to switch calls of different types between subscribers for example, local trunk and transit calls.
The GSS has the following main functions: Selection, connection and disconnection of speech or signal paths through the Group Switch (the switch within the GSS). Supervision of disturbance in its hardware. Supervision of traffic (using the Through Connection Test). Supervision of the PCM links to the Group Switch. Maintenance of a stable clock (timing signals) frequency. This clock frequency is used for synchronization in the Group Switch, and can also be used to synchronize the network.
Quetta Telecom College Quetta
Function Blocks of GSS The GSS function blocks consist of hardware and software. The main function blocks are: Group Switch (GS) this consist of hardware (Time Switch Modules or TSMs and Space Switch Modules or SPMs) and central and regional software. Clock Pulse Generating and Timing (CLT) this consists of hardware (Clock Modules or CLMs) and central and regional software. Network Synchronization (NS) this consists of hardware (Reference Clock Modules or RCMs) and central software. Network Synchronization Commands (NSC) this consists of central software only. Group Switch Maintenance (GSM) this consists of central software only.
Digital Switching
Two of the principles of digital switching are Time Switching and Space Switching Lets look at Time Switching first. Time Switching Time Switching is based on Time Division Multiplexing (TDM) system. For example, Pulse Code Modulation (PCM). A PCM link can be shared in time by a number of speech channels. Each channels share of this time is known as a time slot and each time slot carries a speech sample.
Quetta Telecom College Quetta
In figure above the speech samples from subscribers A.B.C and D are transmitted in a fixed order and are received in the same order. This allows speech connection to be set up between subscribers. A to E, B to F, C to G and D to H. what is required is a method whereby any subscribers on the left hand side can be connected to any subscriber on the right hand side. This is achieved by utilizing a control store data store containing control information) to switch the connection in the required order. The control store manipulates the order in which information is read out of the speech stores data store containing speech information). A simple time switch is made up of: A speech store for temporary storage of the speech samples. A control store which controls the reading out from the speech store.
In figure shone above, the speech samples are read into the speech store in a fixed order A, B, C, D. The values in the control store (that is 3, 1, 4, 2) determine the order in which the speech samples are read out, (that is, c, a, d, b). The result is that the following speech connection, C-E, A-F, D-G and B-H, are established.
Quetta Telecom College Quetta
Space Switching The speech samples are carried in time slots. Space switching is used to switch time slots from an incoming PCM system to an outgoing PCM system. The space switch is composed of matrix of cross points (Electronic Gates). To connect a time slot in an incoming PCM system to a time slot in an outgoing PCM system an appropriate cross point of the space switch is operated for a define period (an internal time slot).
Digital Switching in AXE
Digital Switching is implemented in GSS by the: Time Switch Module (TSM) which implements time switching. Space Switch module (SPM) which implement space switching. Time Switch Module (TSM): In the group switch, the TSM handles the transmission and the reception of speech samples. In the previous section on time switching we used only one speech store; here we utilize twospeech store for two-way speech.
Speech store (SSA) for temporary storage of incoming speech samples. Speech store (SSB) for temporary storage of outgoing speech samples. Speech samples are read into the SSA in a fixed order, but when they are being read out, the order is determined by the settings is the control store AB (CSAB). CSAB controls both the reading of speech sample form SSA and the writing of speech samples into SSB. It contains the address of the speech samples for reading from SSA and writing to SSB. TSM also has a control store C (CSC) that is used to control the operation of electronic gates in the space switch modules (SPM) to transfer speech and data through the group switch. TSM Capacity Each TSM in the group switch has 512 inputs and outputs, that is, its speech stores (Shown in figure as SSA and SSB) each have 512 multiple positions (MUP) with address 0-511 to which calls can be connected. The control store CSAB also has 512 positions.
Quetta Telecom College Quetta
These 512 MUPs allows up to 16 two-way 32 channels PCM links to be connected to each TSM. These PCM links are known as digital paths (DIP). The connection of these links takes place at switching network terminal point (SNTP 0-15).
Space Switch Modules (SPM) SPMs enable connection to be setup in the group switch between subscribers connected to different TSMs and between subscribers within the same TSM. Each cross point (Electronic Gate) can be enabled or disabled by a control store (Control store C or CSC in TSM) by interconnecting a number of SPMs we can form a large space matrix. Each SPM can have up to 32 TSMs connected to it. Group Switch Capacity Combinations of TSMs and SPMs can be connected together, so that the size of the group switch suits the size of the exchange, that is, the number of subscriber and trunks. The largest possible group switch consists of 16 SPMs and 128 TSMs. This gives a total switch capacity of 65, 536 inputs/outputs (64k), that is, 128 TSMs x 512 MUPs.
Quetta Telecom College Quetta
Hardware connected to the Group Switch
The following are connected to the group switch through a software interface called the switching network terminal or SNT. Exchange Terminal Circuit (ETC) this serves as an interface between, for example, a junctor terminal circuit (JTC) in a central subscriber switch and the group switch. Pulse Code Device (PSD) this is an analogue to digital converter used to interface analogue devices to the group switch. Pulse Code Device Digital (PCD D) this is used to provide a digital interface for CCS7 signalling Terminals (ST).
Speech path to the group switch:We have seen that: The speech stores are used to store speech sample. CSAB is used to store the read (SSA) and write (SSB) addresses of these speech samples. CSC is used to connect TSMs.
Quetta Telecom College Quetta
Now we will see how a speech path is established through the group switch. The speech path is established simultaneously in both directions, that is, from the A subscriber to the B subscriber and from the B subscriber to the A- subscriber. We first look at the set-up of a call from A to B. The CSC of each TSM controls the connection of a horizontal row of cross points to a vertical row of cross points in the SPM. Speech sample are read out from SSA in TSM-0 on two horizontal paths 0 through the SPM and on the vertical path 7 to SSB in TSM-7.
In the figure above, we see the speech path in the B to A direction. CSC in TSM-0 connects horizontal 7 (from TSM-7) to vertical 0 (from TSM-0) in the SPM. Speech samples are read out from SSA in TSM-7 on to horizontal path 7 though the SPM on the vertical path 0 to SSB in TSM-0.
Quetta Telecom College Quetta
Group Switch Reliability: As the group switch forms a vital path of the AXE exchange, expecting demands are made on its functional reliability. For increased reliability, the group switch is duplicated in two planes, the A plane and B plane, requiring two identical sets of TSMs and SPMs. A speech sample is sent through both planes. If there are no faults the speech sample is taken only from the A plane. Parity check functions are provided to supervise the group switch hardware. For example, checking the speech sample going through the group switch. The parity check function will immediately detect any hardware faults. Generally, when a fault is detected, the suspected hardware unit is blocked and tested, and corresponding hardware in the other plane handles the traffic.
Quetta Telecom College Quetta
Synchronization
Synchronization of the Group Switch All digital switches require some form of clocking that is, timing signals or clock pulses. The clock rate determines the rate at which samples are read from or written into the speech stores. The Group Switch has three clocks, or Clock Modules (CLM), for security and reliability. The operation of the Group Switch will be trouble-free, even in emergency situations when only one clock may be available. Synchronization of the Exchange The CLMs that are used to synchronize the Group Switch are also used to synchronize the digital ports of the exchange. This prevents slips (that is, buffer under-or over-flow). If a slip occurs one whole frame of information is lost. To ensure stability of the CLMs local clock reference are used. There are two types of local clock references: Reference Clock Modules (RCM) these contain a quartz crystal oscillator with an ageing of 10-10/days (software memories in RCM compensate for this ageing). Cesium Clock Module (CCM) this is an extremely accurate clock which does not exhibit any ageing. Non-Ericsson reference clocks can be connected through an Incoming Conversion Module (ICM). Connecting the Exchange to the Synchronization Network As long as the exchanges clock equipment is free running (no matter how stable) loss of information in the buffers cannot be avoided. For speech this is not a great problem but for CCS7 data service, Digital mobile telephony etc. it is. To keep information loss for these services at an acceptable level the solution is to connect the exchange to the synchronization network. It is again the same clock equipment that is used for this purpose. Depending on the synchronization plan for the network, AXE can be connected in two ways to the synchronization network:
Quetta Telecom College Quetta
Through an incoming frequency Conversion Module (ICM) Through a normal traffic carrying link terminated in an ETC In figure below, the ETCs extract the timing information from the incoming traffic carrying links that are connected as synchronization references. The ETC forwards this reference information to the CLMs. It is treated by the CLMs like any other reference. A maximum of 24 such references can be connected by to the CLMs. The figure also shows a 5 MHz external reference from a remote cesium clock to an incoming frequency Conversion Module (ICM), which forwards the timing information to the CLMs.
Trunks and Signalling Subsystem (TSS)
Different Supervisions
Blocking Supervision Disturbance Supervision Seizure Quality Supervision Seizure Supervision Dip Quality Supervision ---------Bit Fault Frequency Supervision Disturbance frequency Supervision Slip frequency Supervision
Quetta Telecom College Quetta
Blocking Supervision This function checks that the number of blocked devices in a route do not exceed a preset value. Disturbance Supervision This Function Supervision that the proportion of the number of disturbances to the number of selections will not exceed form ADL (Allowed disturbance Level). Seizure Quality Supervision This Function is used to supervise the ratio of the number of Seizures to the number of Normal calls.
Normal Call
The maximum time specified for a call (Usually 60 sec) (Can be set between 10 to 255 Secs) Two Alarm Limits Device is Suspected Device Should be Blocked
Seizure Supervision
This Function Supervises that the proportion of the number of disturbance to the number of selections will not exceed from ADL (Allowed Disturbance Level).
Quetta Telecom College Quetta
Recommended DIP Supervision Values
Quetta Telecom College Quetta
TRAFFIC HANDLING IN AXE
A PSTN CALL This section describes a call between subscribers connected to different exchanges in the network. It outlines the subsystem and function block inter working involved in the setting up, supervision and clearing of the call
Quetta Telecom College Quetta
Call Reception
The subscriber line is continuously monitored by the subscriber switching subsystem (SSS) hardware when a subscriber lifts the handset it is detected by the subscriber line interface circuit (LIC) in SSS. The function block (LI2) signals the function block combined juncture (CJ) in the subscriber control subsystem (SCS). CJ coordinates the traffic handling functions in SSS. CJ requests the junction terminal (JT) Function Block to seize the channel to the Group Switch (GS). Interrogating the Subscriber Data
The subscriber category (SC) Function Block in the traffic control subsystem (TCS) stores data on all subscribers connected to the exchange, for example, the subscriber phone type (Analogue or Digital). CJ requests information from TCS so tat the correct equipment can be ordered for connection to the LIC, for example, a key set telephone which uses multi frequency tones requires a key set code receiver circuit (KRC).
Quetta Telecom College Quetta
Allocation of Storage Space
CJ orders TCS to reserve memory for data about the call including the subscriber data mentioned above. This data is stored in an RE individual in the Register (RE) Function Block. Once an RE individual is reserved the exchange is ready to receive the B-number. Re inform CJ, which sends a signal to key, set code receiver (KR@) and a dial tone is sent to the Asubscriber. A call supervision and coordination of function (CLCOF) individual and TCS is also reserved for the supervision of the call. Digit Reception
Once dial tone has been received the subscriber can begin dialing. The first digit is received by the SCS and passed to TCS where it is stored in RE. Within TCS the digit is analysis in the Digit Analysis (DA) function block to determine how the call is to be set up. Analysis continues until sufficient digits have been analyzed to set up the call.
Quetta Telecom College Quetta
Digital Analysis
Some analysis results obtained from the function block DA require further analysis. Within TCS, the function block Route Analysis (RA) performs further analysis to determine the route for a call and the number of digits to be sent to the next exchange. Data on how a call is to be charged is stored in the Charging Subsystem (CHS) for analysis. All the analysis results are sent back to the function block RE and stored. Selection of Trunks and Group Switch path
With the route identified from the analysis stage, RE requests the Broadway Trunk (BT) function block in Trunks and Signalling subsystem (PSS) to select a free outgoing trunk line (a BT device within the selected route). Re also requests the Group Switching Subsystem (GSS) to reserve a speech path through the Group Switch that is from the juncture terminal circuit (JTC) to the outgoing trunk (or BT Device) in the Exchange Terminal Circuit (ETC).
Quetta Telecom College Quetta
Digit Sending
All of the digits are now transferred to the BT function block. In this case the call users CCS7 signalling and hence CCS7 hardware and routing function blocks becomes involved in the call. The CCS7 Distribution and Routing (C7BR) function block is responsible for routing of all messages and distributes terminating messages to the correct user part. The CS7 Signalling Terminal (C7ST) Function Block messages the signalling terminal (ST-7) hardware. There is always separate routing for the signalling messages as they do not have to be transmitted on the same ETC as the speech. A signalling path is connected through the Group Switch between the ST-7 and the ETC.
Acknowledgement Reception
If the called subscriber is free the other exchange sends an acknowledgement signal to RE to proceed to the call set up. This signal is sent via TSS and CCS. TCS can now complete the call set up.
Quetta Telecom College Quetta
Completion of Call set-up
TCS completes the call set up: A connection between the LIC and JTC is made in TSW The reserved path in the GSS is activated. A connection is then established to the B-subscriber TCS in conjunction with SCS and CHS completes preparation for recording charging data for the call. Call Supervision and Charging
On completion of call set up the function block call supervision and coordination of functions (CLSOF) takes over control of the call. The A- subscriber will then receive the ringing tone from the B-subscriber exchange. Once the called subscriber answers conservation can begin. Charging data is recorded while the call is in progress and stored in the CHS. Clearing of Call The call is cleared normally when the calling subscriber replaces the hand set. This is detected the SSS hardware and a signal is sent to CLOCOF which then orders all equipment and functions relating to the call to be released.
Quetta Telecom College Quetta
APZ
The Control Part
Quetta Telecom College Quetta
THE REGIONAL PROCESSOR
The complete control system of AXE faces many different types of processing. There are complex analyses requiring much data as well as routine scanning of telephony devices. The APZ system is thus divided into two types of processor: The Central Processor for complex and data-demanding functions such as B-number analysis and storage of subscriber data. Many Regional Processor for time consuming scanning and filtering of signals. The Regional Processor is also used for pre-processing of signals and complex events in order to remove load form the Central Processor. The Regional Processor, abbreviated RP, is connected to the Central Processor by means of a so-called RP Bus. When the RP bus is drawn in figures, it is indicated by a single line. However, the bus is divided into several branches with 32 RPs on each branch. Please study figure below.
The RPs controls the telephony equipment, which is divided into so-called Extension Modules, E.M. The E.M is a concept defined for many purposes: The EM is the smallest handling unit in the system. It is not possible to extend the exchange with only half an EM. The EM is the smallest part that could be knocked out because of power failure. This means that each EM has its own DC/DC converter.
Quetta Telecom College Quetta
The EM is also the handling unit from software point-of-view, and the software scans one EM at a time. The EM is in some cases a complete magazine but it can also be a board inside a magazine. In that case, there is a DC/DC converter in the board itself.
TASKS ALLOCATED TO RPs
As already mentioned, the Regional Processors are mainly responsible for routine tasks. To be correct, one should say that the Regional Software of the block is responsible for the routine tasks. The RP itself only contains an operating system. The application programs are loaded into the RPs when the equipment is defined and the RP is deblocked. Fig 4:1.3 shows the structure of a block containing hardware.
The central software inside the Central Processor performs tasks that concern all devices, while the regional software inside the Regional Processor handles the devices in the Extension Modules. The regional software includes functions such as scanning of test points, reading of error registers and operation of operation points (connected to relays or gates). In some cases, the regional software also performs some type of filtering. That means that the regional software also performs some type of filtering. That means that he regional software takes care of disturbances and faulty signals, e.g. faulty line signals.
LOAD-SHARING
In normal operation, the Regional Processor works in so-called load-sharing mode. It means that one RP takes care of half of the load while the other takes care of the other half. If one of the two RPs in the pair becomes faulty, the other RP in the pair takes over the complete load. In order to make that possible, the data is taken care of by the central software of the blocks that have regional software in the RP-pair. The updating procedure will cause not established calls to be disconnected, connected calls are, however, not affected by the RP error. Figure shows how an RP fault is handled by the system.
Quetta Telecom College Quetta
During normal operation, the Regional Processor get their orders from CP-A (the Aside of the CP). In normal operation, the A-side of the CP is Executive and the B-side is in stand-by Working mode. Signals from the SB/WO-side are received by the RP but only checked regarding parity in the bus interfaces circuit. The parity supervision of signals from the SB/WO supervises the RP-CP communication between the RPs and the CP side, which will be SB/WO at that moment (usually the B side). The messages from the EX-side are also parity-checked, and also read into the RP. Messages from the RPs are sent to both CP-sides. That is necessary, as both CP-sides must have the same information in order to be able to operate in the parallel mode. Figure shows the principle.
THE HARDWARE OF THE REGIONAL PROCESSOR
The hardware of the RP is built around so-called gate-array circuits that each contains a large number of gates. The gates can be combined into registers and logical circuits to perform various tasks. The RP is built up of 5 circuit boards as shown in figure.
Quetta Telecom College Quetta
Here follows a short description of the circuit boards: PRO This board contains the actual processor, and there are 3 gate-array circuits located on the board. The gate-array circuits are called ALU, AHC and DHC. The microprogram, as well as the registers, is also located on the board, more about the gate-array circuits later on. MER The board MER contains the memory of the RP, which is a RAM memory with 256kW. There is also an EPROM memory on the board for the boot program. The gatearray circuit BIC is responsible for communication with the EM bus as well as the RP bus. BIC works autonomously to a great extent with bus communication. RPBU There are two boards of this type, one for each RP bus. One board connects the RP bus from CP-A and one connects the RP bus from CP-B. There is no intelligence located on the boards. POW The power board converts the 48V to the voltage required inside the RP (+ 5V). The converter has a capacity of 20 Watts. Micro-Program The micro-program controls all the work executed inside the processor. The orders are sent to the other units via a control bus, which interconnects the circuits ALU, DHC and AHC with the micro-program.
SUPERVISION OF THE RP
In order to have quick error-detection in the Regional Processors, a special block is dedicated to this task. The block, RPFD (RP Fault Detection), has both central soft wares in the CP as well as regional software loaded in each Regional Processor. The regional software is referred to as RPFDR and the central software RPFDU. The regional software contains several test programs that are run through at the end of each primary interval. The test program takes about 0.1 milliseconds and that corresponds to some 2% of the processing time some of the tests cannot be completed in one test sequence and are thus distributed over a number of intervals. Figure shows the principle.
Quetta Telecom College Quetta
HANDLING OF RP FAULTS
When the alarm is generated, the Operational Instruction with the same name should be followed. The main part of the repair of an RP is based upon three commands. The three commands are:
1.
REPRI
The command initiates a deblocking attempt of the RP in order to check if the error is permanent. In case any error detected during the deblocking, they are recorded in RP Event Record and block RPDI performs a diagnosis on the available error information. The result of the diagnosis is printed in the printout RP Diagnosis. The printout includes a list of the boards suspected of being faulty.
2.
REMRI
The command prepares the system for manual intervention by changing the states of the RP If required. The command also includes the identity of the Boards that must be replaced. The procedures required to repair the board are printed in the printout RP manual intervention.
3.
RECRI
The command initiates a repair check of the RP. The repair check starts with tests of bus senders, parity supervision and PHC function. If the check-sum of the PR is Faulty. It is reloaded before it is deblocked. If the repair check is successful, the board indicated in command REMRI is registered in RP Event Record. Finally, the printout RP REPAIR is printed, indicating the result the repair check.
The main part of the repair procedure is based upon these commands. The sequence can be seen in the figure.
Quetta Telecom College Quetta
CA MAINTENANCE APZ 211 10
The subsystem CPS
CPS stands for central processor subsystem and of course, contains the duplicated central processors of the AXE system However, the subsystem CPS also contains large number of blocks for various functions related to administration of stores and job execution. The subsystem interiors closely with the other subsystems in the APZ system. The maintenance subsystem MAS, is responsible for the maintenance of the processors and will work in close relation with the CPS. The subsystems in the I/O-system also work closely with the CPS in case of loading and jumping of software. Figure shows the subsystem CPS and its environment.
Quetta Telecom College Quetta
The application software of the exchange is also stored in the central Processor and is executed by it. However, from a system structure point of view, the software belongs to the system APT. During normal operation, there is not much interwork between the software of the APZ and the software of APT. The inter work takes place in the event of errors in the APZ (e.g. blocked RP) and during operational changes (e.g. Size Alteration). In case of CP-RP communication, the APZ acts as a transport company and sends the software signals in either direction without knowing the contents. The inter work must follow a certain standard, which the APT software must have in order to get the communication working.
States of the two CP sides
As you probably know one of the two CP sides in always Executive and the other is Standby. During normal operation, when no error exists in the system, the CP-A is in executive state and the CP-B is in the Stand-by working state. The work of the two processors is continuously compared by sending the data on the computer bus from the Executive side to the stand-by working side. The data is compared for each micro-cycle in order to detect hardware errors. In case of mismatch, the states of the two sides change depending on in which side the error is located (more about that later on). The two CP sides can assume the following states, but notice that one side is always executive. 1. Executive (EX) This means that the CP-side is the one that controls the Regional Processors connected to the CP-pair. 2. Stand-by Working (SB-WO) The CP-side is performing exactly the same thing as the EX side. The only difference is that the signals sent to the RPs are not read in into the RPs. The signals are only checked for parity. Signals from RPs are sent to the SB-WO side as well, in order to have the same data in both sides. 3. Stand-by halted (SB-HA) If the system finds a permanent error in one of the CP-sides or if the frequency of temporary errors is too high, the CP-side is stopped. No processing is made in the CP. 4. Stand-by Separated (SB-SE)
Quetta Telecom College Quetta
In some cases, it can be useful to have one CP-side separated. In this state, the CP-side is running but it has no contact with ordinary Regional Processors. While the CP-side is in this state, new software can be loaded or other major changes can be made. The state is set by command. 5. Stand-by Updating (SB-UP) When one CP-side has been halted or separated, the data in the two sides differs. In order to have a parallel system again, the previously halted or separated side must be updated. This means that the EX side transfers data to the SB-UP side via the UMB, Updating and Matching Bus. If updating is successful (e.g. no hardware errors in the stand-by side) the state will change to SB-WO or EX (after switching sides when the updating is completed). Functions implemented in subsystem CPS When one thinks about the subsystem CPS, the hardware is the first thing that comes to mind. However, the hardware is only one part of the subsystem, because many functions are implemented only in the software. The next chapter in this document describes the hardware of the processor. This short chapter describes some of the most important functions implemented in the software of subsystem CPS. 1. Program Execution This function is the Executing System of the processor and is implemented in software as well as in micro-program. The purpose of the function is to allocate processing power to the functions in the system according to a given priority system. The job Buffers, job tables, Time Queues and the Calendar function are all part of this function. 2. System Backup In case of severe system disturbance, the store of the CP is reloaded from an external medium. The function handles both the dumping function (output of data) as well as the reload function. The reload file can be located on a tape, a disk or in the memory of the APZ itself. 3. Loading Administration New blocks can be loaded into the APZ and old ones can be removed. The stores (PS, Ds and RS) can also be reallocated in case of major changes in the software. All these functions must be administrated by various parts of the system. 4. Size Alteration of Data Files If the operator would like to extend the number of data files (extensions), this function takes care of that. Store Reallocation is requested from the function Loading Administration. 5. Program Corrections In case of software errors that require immediate correction, the APZ contains functions for inserting and deleting program corrections. The corrections are written in assembler code. 6. Test System This system, which is mainly used in tests performed by Ericsson, enables the operator to trace signals in the software. Variables can also be traced and printed. This function can be used during ordinary traffic handling. 7. Processor Load Measurements In the case of large exchanges, the upper limits of the processors capacity might be reached at peak traffic. In order to detect the overload before the system starts to reject traffic, the load-measuring function can be used.
Quetta Telecom College Quetta
8. Function Change The function can be used to replace, add and/or delete function blocks in the system. The function takes care of the administrative parts of the Function Change and enables the operator perform the changes with as few disturbances as possible.
Function Blocks in CPS which Consists of Hardware
The hardware of the processor APZ 211 10 has been divided into seven function blocks. Each block has its task in the processor and there are clear interfaces between them. The seven blocks are: AMU Automatic Maintenance Unit AMU determines the states of the CP sides. All errors in the CP sides are reported to the AMU, which takes action accordingly. CPU RPH Central Processor Unit CPU is a micro-program-controlled processor that works with program execution
Regional Processor Handler RPH handles signalling to and from Regional Processors. The RPH is also responsible initial load. MIP MS Micro Program The block MIP is a store containing the micro-program that controls the CPU.
Main store MS is the store of the CP. The store is logically divided into Program Store. Reference Store and Data Store. Some buffers used by the CPU and the RPH are also located in MS. BMU Bus access, update and Match Unit BMU distributes access to the CP Bus. Both the CPU and the RPH can use the Main Store and, consequently, the CP Bus as well. MBU decides which unit should have access to the bus. BMU also handles comparison and updating between the CP sides and communication with the AMU. DPC Display Control This block is responsible for the display of CP status. There is one internal display (with LED) in the CP magazine and an external display can also be connected (optional). Figure shows the hardware of the two CP sides on a Function Block level.
Quetta Telecom College Quetta
Between the two CP sides, and also between the CP sides and the AMU, there are some buses used for different purposes. Here is a short description of the buses indicated in above figure. IRPHB Inter-Regional Processor Handler Bus The bus connects the two RP Handlers in the CP sides and is used to transfer information between the CP sides when function changes are performed. Updating and Match Bus During normal operation, the bus is used to transfer information from the EXside to the SB/WO side for comparison. During update (SB/UP), the bus is used for updating the previously halted or separated CP. AMU Link If any CP side detects errors, these are reported to the AMU via this bus. In the other direction the AMU can send orders to the CP sides to change status or to initiate test programs or system restarts. Regional Processor Bus All Regional processors are connected to the RP bus. The bus is divided into branches where 32 RPs can be connected to the same branches. Extension Module Regional Processor Bus The EMRPB is the processor bus used in the subscriber Switch. It is possible to connect one EMRPB directly to the APZ 211 10. if more than one EM Group (2648 subscribers) is connected to the exchange, the EMRPBs are connected to the RP bus via Regional Processor Bus Converters or Signalling Terminals.
UMB
AML
RPB
EMRPB
The hardware of the Central Processor
The function blocks studied in the previous chapter are, in some cases, implemented in the same circuit. This has been possible as the technology in APZ 211 10 is to a great extent based upon so-called ASIC circuits. ASIC stands for Application Specific Integrated Circuit. The principle is to use a standard circuit containing a large number of gates, to combine these gates into functions and then to define internal buses and registers. In one ASIC circuit, there are 100,000 gates and the gates can be operated at 12 MHz. As an example, the function block MBU and the logic for controlling the Main store have been implemented in the same ASIC circuit. This means that it is impossible to see the function block BMU, in as much as it is part of an ASIC circuit. The figure below shows the hardware of the APZ 211 10, with the different function units and the boards of the CP indicated. When a memory is indicated in the figure, the size and the word length have been indicated. As an example 256k8 means that there are 256 thousand words with a bit length of 8 bits. Please study figure shown below.
Quetta Telecom College Quetta
MPU Main Processing Unit This board contains the ASIC circuit MP, Main Processor. The MP contains all the function for a complete processor (The circuit is more thoroughly described further on in this book). The board also contains the registers used by the processor. The registers referred to as Register Memory, also contain a cache memory referred to as BAS, Base Address Store. MPS Main-Processor Store The board MPS contains two stores that are used to store the micro-program of the CPU. When the processor is started the RP Handler transfers the information from the EPROM memory to the RAM memory on the same board. The length of the micro-program is 56 bits. The main reason for having the micro-program in RAM is the execution speed. MSC Main store Control The board contains the ASIC circuit MUD, Memory and Update. The MUD contains the memory handling logic, as well as the function block MBU (Bus access, Update and Match Unit). The board also has a clock that receives pulses from the reference oscillator in the AMU. STB Store Board On each STB, there are 4M words of 19 bits, 16 bits word length and 3 bits for error correction. It is possible to have 6 boards with memory in the MS, which makes the total size 24M words with 16 bits. RPHP RPH Processor The RPH consists of an M68000 micro-processor with its program stored in an EPROM memory. The board also has an ASIC circuit referred to as HAL, Handler Logic. The HAL contains a scanner that scans the connected RPs and EMRPs. The four boards connected to the HAL circuit (RPBI) are for the physical connection of the RP busses. To each RPBI board, one RP bus is connected and each bus can connect, in turn, 32 RPs. This means that 128 RPs can be connected to the handler as well as one EMRP bus with 32 EMRPs. If more RPs is used in the exchange additional RP Handlers will be connected. In total, 512 RPs can be connected to the APZ 211 10. AMU The hardware of the AMU, Automatic Maintenance Unit, consists of two circuit boards. Please study figure, which shows the hardware of the AMU with the two boards indicated. The board AMUI only contains interface circuits to the two CP sides. That includes error registers used for storage of the error signals sent from the CPs. On board AMU2, there are two micro-processors M6803. To each processor, there is an EPROM that stores the program, as well as a small RAM memory. The two processors execute the same program; their contents are continuously compared with each other. In case of mismatch, the AMU is flagged faulty and the CPs are notified. During normal operation, i.e. the A-side is EX and the B-side is SB/WO, the AMU is passive. The state passive
Quetta Telecom College Quetta
means that the interface to the CPs is blocked and that the AMU is performing self-tests. When one of the CP sides reports an error, the state changes to active and the AMU can order the CP sides to initiate action. This method prevents a faulty AMU stopping the Exchange, e.g. by ordering both sides to halt. The AMU also contains a Reference Oscillator that supplies both CP sides with clocking information. The oscillator is required, because the CP sides work in synchronous mode in normal operation: Priority System
MAL, Maintenance Level This is the highest priority level in the system and it is initiated when there are hardware errors detected inside the processor. Note that this level is a micro-program level that can interrupt ordinary programs in the middle of an instruction. MFL, Malfunction Level This is the highest program level in the system and it will be used to run fault-finding programs in the event of hardware errors. This level will use the interrupted levels register in RM. The registers are saved in the store by the micro-program before the program level is activated. TCL, Test Console Level Jobs related to CPT functions are handled on this level. The CPT system is a tool for testing, starting and changing the status of the CP when it is halted. TRL, Trace Level Software tracings initiated with the so-called Test System uses this level. This level has its own set of registers. ETL, External Trace Level The micro-program level used during the initial test of the processor requires external hardware for test of the CP. IOL, Input/Output Level In case of IO transfer of files, the micro-program uses this level to transfer the signal to the IOG, I/O Group. THL, Traffic Handling Level All jobs related to traffic handling use this level. The level itself is divided into three sub-levels referred to as THL1, THL2 and THL3. These levels correspond to the following: THL1: Run-through of the Job Table, done once every 10 ms.
Quetta Telecom College Quetta
THL2: Handling of jobs stored in job Buffer A. THL3: Handling of jobs stored in job Buffer B. C-level This level is used for jobs stored in job Buffer C, i.e. jobs mainly related to Operation and Maintenance. Commands and printouts are handled on this level, as well as maintenance function such as statistics and traffic recordings. D-level This level is used for jobs stored in job Buffer D, i.e. jobs mainly related to routine tests of the Central Processor and the RP Bus (RP-CP communication). In normal operations, there are always some jobs stored in job Buffer D which means that the processor executes self-tests in case of low traffic. Magazine Layout When alarms are initiated by the system, the relevant Operational Instruction refers to test commands for testing the faulty CP side. When the test is completed, the printout contains a list of boards suspected of being faulty. The board identities are printed on top of the magazines. This makes the repair of the CP safe and easy. There are two variants of magazines available for the APZ 211 10. The only difference between the two variants is the number of RPs that can be connected, and the maximum store size. There is no difference in capacity. The smaller variant is intended to be used for small applications with one Subscriber Switch only (up to 2048 subscribers). The smaller variant can control 32 RPs and 32 EMRPs and 8M words can be used in the Main Store. The following tables show the hardware of the two magazine types.
The boards have the following function: SIU, Status Indicator Unit The board has LEDs for status indication of the CP state. STB, Store Board Each board contains 4M words. The store can be partly equipped. MSC, Main Store Control Contains the logic for control of the Main Store, as well as the functions BMU, Bus access updating and Match Unit the UMB bus as well as the AML link are connected to the board. MPU, Main Processing Unit The Main Processor Circuit as well as the Register Memory is located on the board.
Quetta Telecom College Quetta
MPS, Micro Program Store The board stores the micro-program on EPROM and, during normal operation, on RAM memory. RPHP (RPH Processor) Contains the scanner for the RPs as well as the micro-processor included in the RP Handler. REB If external RP Handlers are required (128 RPs), this board is used to connect the external RPH magazine with the CP magazine. RPBI, Regional Processor Bus Interface The physical interface with the RP bus, no intelligence is located on the board and each board can connect one bus with 32 RPs.
CP Faults
CP Fault means that there is a hardware fault in one of the two CP sides or in the Automatic Maintenance Unit. AMU Hardware faults can either be permanent or temporary, but they are handled in a similar way by the system and, in most cases, also by the operator. In case of a permanent fault, an alarm is generated by the system indicating that a unit is faulty. When temporary errors are detected, the system might have to detect more temporary errors of the same type before a diagnosis can be made. The supervision of the Central Processor must be a continuous process that is active all the time. The supervision must be able to detect a fault before it disturbs the traffic handling in the exchange. If faults can be detected quickly enough, the system can decide which CP side to be halted and let the other CP run the traffic. In that case the switchover can be made without disturbing the traffic handling in any sense. How, then, is such supervision achieved? The answer is that there are many different methods and functions used in order to detect hardware faults. Supervision is implemented by means of the following functions: 1. Supervisory circuits Examples are parity control of all types of data transfer, and comparison of the two CP sides during normal operation. 2. Feasibility check performed by micro-program Before the Main store is accessed, and before signals are sent between blocks in the CP, the micro-program checks the addressing range, pointer values, signal numbers etc. (These tests are mainly used to supervise the software of system and they are not handled in this Chapter). 3. Routine test programs This type of tests have been implemented to check the supervisory circuits and also to test functions that cannot be supervised by means of parity alone. MAS (the Maintenance Subsystem) are responsible for the functions described above. However, some of the functions are implemented by means of hardware in the CP and by means of micro-program sequences in block MIP. Both the hardware and the micro-program belong to the subsystem CPS, Central Processor Subsystem. The main task of MAS is to handle the error signals in a safe and sure way, to keep the system running at all times and to isolate the faulty unit. The subsystem MAS consists only of software but it cooperates closely with both the hardware and the micro-program of the CP. When errors in the CP are handled, MAS also interacts with the AMU.
Quetta Telecom College Quetta
The Maintenance Subsystem is not the only part responsible for handling errors inside the CP. As it is already mentioned, the AMU is an important unit that interacts with the CP sides in case of errors. The supervisory principles of the APZ system are as follows: 1. Supervision of EM
As described in Unit 1 of this module, it is the RP echo that tests all the EMs in the exchange. In case of errors, the software of MAS takes care of the error to minimize the effects of it. 2. Supervision of RP To a great extent, the RPs supervise themselves (by means of software belonging to MAS stored inside each RP). Some tests of the RPs are done from MAS software in the CP. When errors are detected, the MAS software in the CP is responsible for the actions taken. 3. Supervision of CP The two CP sides supervise themselves, but they are also compared with each other to facilitate quick error detection. All errors are reported to the AMU which orders the CP sides to perform various tasks (e.g. changes state, initiate tests). 4. Supervision of AMU In normal operation, the AMU is passive, which means that it cannot change the CP states. The AMU supervises itself but is tested by the CP at regular intervals. Figure shows the principle
Quetta Telecom College Quetta
Fault Detection in CP Fault detection in the CP is based upon the three main principles mentioned before (supervisory circuits, micro-program and routine tests). The supervisory circuits can be divided into two categories: 1. 2. Side-comparing circuits Side-determining circuits
Side-comparing circuits are used to compare the work of the CP sides. Side-Comparison is a very quick and powerful way of detecting hardware errors in the two processor sides, the comparison is always made first in the SB/WO side as that side, is one micro-instructions after the EX side. This time difference is enough to transfer the information to the SB/WO side and theyre to compare it with the data from the SB side. The data to be compared are: Data on the Central Processor Bus Interrupt-signal form the priority logic Refresh-order for memory in MS Parity on the Result bus in the Main Processor Side-comparison is not able to indicate which side is faulty, only that one sides work is starting to deviate. The error-handling procedure is described more thoroughly further on in this unit. The so-called side-determining circuits are able, as their name indicates, to locate the origin of the error. The circuits have been designed in order to supervise the hardware in as many ways as possible. The main principles are: 1. Parity All buses inside the APZ use parity. Parity is generated before the data is transmitted and it is checked before it is read in from the bus. Some of the stores are also equipped with parity. The Main Store is, however, equipped with a 6bit Error Correction Code, which can detect 2bit errors and correct 1-bit errors.
Quetta Telecom College Quetta
2. Voltage The CP as well as the AMU has circuits that detect if the voltage is below permissible limits. 3. Timing Data that is sent on the CP bus as well as on the RP bus is supervised with regard to time. If sending is not concluded within a certain time, an error is registered. Figure below shows some of the circuits inside the CP.
Handling of Hardware Errors
When the AMU has received an error single from either of the two CP sides, it changes state from passive to active. Depending on the type of error signal and the existing state of the system, different action is ordered. In this chapter, we are going to study how a matching error is handled by the system when the two processors are working in parallel. Figure below, shows the sequence in a graphical form. The figure is described in the text as well.
The matching error is reported to the AMU, which then changes its state to active. Both CP sides are ordered to make an interrupt to the highest priority level in the system, Maintenance Level. The AMU also orders the CP sides to run through a 20-millisecond-long test program referred to as the Side-Determining Program SDP. The test program tries to test, as many functions are possible during this short time in order to locate the error to one of the sides. In case the CP-A reports an error signal in the middle of the test program, the AMU orders CPB to be executive and orders CP-A to halt. The CP-B resumes the traffic handling and executes self-tests in order to find errors in case of faulty side indication. Repair of CP When the alarm is generated, the operator should follow the operational instruction OPI, with the same name as the alarm (CP Fault). The OPI will refer to the three commands RECPCI, REMCI and RECCI. Theses commands have the same function as the commands used to repair RP and EM as described in Unit 1 of the module. The commands have the following meaning: REPCI The command initiates a diagnosis of faults in the CP. The diagnosis is made with the data stored in the CP Error Record. The result of the command is a list of boards suspected of being faulty. If more than one fault is found in the system, the printout will be divided into two
Quetta Telecom College Quetta
parts, each part having its own list of boards. The board indicated at the top of the list is the one that is most strongly suspected. REMCI The command prepares the system for a manual intervention by changing the state of units if possible. The command includes magazine and board identities specified by parameters. If manual intervention is possible, the result printout indicates what action to take. After the board has been changed; this command is used to perform a repair check. If no errors are found in the system, the replaced board is registered and the repair sequence is concluded. Below figure shows the principles that should be used when working with the commands. Note that OPI indicates that the same measures and instructions in the OPI must be followed at all times.
RECCI
Quetta Telecom College Quetta
System Restart
Different restart ranks: 1. Small System Restart Small Restart will clear all calls in the register position, which means calls being setup at the moment. This also includes changes of subscriber services being made at the moment. The already set up calls will not be affected by the restart. Semi-permanent connections are not affected. 2. 3. Large System Restart Large Restart will clear all calls except semi-permanent connections. Reload + Large System Restart Reload of the system will stop the exchange from accepting new calls. The time of the stoppage is less than one minute but it depends to a great extent on the media used for the reload file as well as the amount of data (exchange size). A large restart after the reload will clear all calls.
What, then is really done by the system during a restart. The answer is that as much data as possible is reset and checked in order to obtain reliable data after the restart. Here are some of the most important activities performed by the system. 1. All job Buffers and job Tables are cleared and the job Table is built up again in the restart. The job Table is used to generate periodic signals to block performing time supervision. 2. Variables in all blocks, which are to be cleared by the operating system. The designer of each block determines which variables to clear. 3. Important data in all RPs and EMRPs is loaded again in order to ensure its reliability. 4. The program of each block checks lists, tables and states. Every block in the system has a programs different activities depending on the block type. When all these things have been done, the system is ready for handling traffic again. The amount of code to be executed during the restart causes a stop in traffic handling between 30 second and 2 minutes depending on exchange size a restart rank.
System Stoppage
System Stoppage means that the APZ is not able to control the exchange in anyway Stoppage usually means that no traffic is executed and no commands are handled by the system. Why then is the system stopped and what causes this critical state. Well, there is no absolute answer to that question, but here are some errors that may cause a stoppage.
Quetta Telecom College Quetta
1. Software errors causing cyclic restarts or reloads In case of software errors, the system tries to cure the error by initiating a restart. The third will also include a reload of the program, reference and parts of the data store. If the error is not cured by this reload, the system enters a state of cyclic reload. In this state, the processor is busy making reloads and restarts and no traffic is executed. If the reload function is not working for any reason (e.g. hardware error) the system performs cyclic restarts. 2. Hardware error in both CP sides This type of error situation is very rare, in as much as the probability of having two errors at the same time in both sides, is extremely unluckily. It must be noted that an error in the I/O Group should not generate activities relating to system stoppage. This means that the operator must have indications that the exchange is incapable of handling traffic before the relevant operational instructions is used. The OPI that should be used for this type of error situation is Manually initiated System Restart or system start. It is of outmost importance that this OPI is followed step-by-step in all
error situations.
CPT, Central Processor Test
CPT is a system that is built into the Central Processor, which makes it possible for the operator to perform some tasks when the processor is not working. The CPT system is thus used for initial loads and initial tests of the hardware. The CPT is based upon the three main things:
Quetta Telecom College Quetta
1. Software in Support Processor 2. Software in Regional Processor Handler (RPH-0) 3. Micro-program in CPU.
IOG
Input Output Group
Introduction There are two types of IO systems. 1. SP based IO system 2. AP based IO system IOG 11 belongs SP based IO System, several variants of SP-based 10 System exist today IOG 11A, 0G 11B, IOG 11C and 10MC. Input/Output Functions The I/O functions of IOG 11 reflect the tasks to be performed by the equipment. These tasks can be generally described as follows: Handling of data Secondary Storage (binary or alphanumeric) to and from the Central Processor, CP. Thus 1OG 11 is the IO interface to the world outside an AXE exchange. (mass storage) of information on magnetic media, e.g. hard disk, flexible disk and magnetic tape.
The above-mentioned data handling can consist of the transportation of either alphanumeric information e.g. commands and printouts sent to or from a terminal or over a data link or of data stored in files on the magnetic media. Note that the information stored in a file can be either binary information e.g. backs up data or alphanumeric data e.g. commands in a command file. From the above considerations we see that the hardware of IOG 11 must contain the following components: An interface to the Regional Processor Bus (RP Bus) for connection of the IOG to the CP. A Processor with the necessary software to control the different units diagnose IO faults and to communicate with the CP, external mass storage devices (hard disks, flexible disks and magnetic tapes). Data links for both high speed and low speed traffic using both asynchronous and synchronous transfer, Alphanumeric terminals for man-machine communication. As well as the above units, the IO Group is also required to provide alarm information on the alarm panel and alarm printer. The alarm information concerns both internal alarms form APT, APZ and the IOG itself, as well as external alarms (temperature, humidity, and door-control. Etc.). Thus the IOG must also contain: An alarm printer i.e. an alphanumeric terminal to which alarm printouts are automatically routed.
Quetta Telecom College Quetta
An alarm interface to which alarm panels and external alarm sensors are connected.
The above-mentioned components are incorporated in IOG 11 as shown in figure below
CP
RPA SP
RPA SP
HD AT AT
HD
AT FD ALI MT
AT FD
MT
DL
DL
Example of an IOG 11 The above figure shows the standard IOG 11 configurations. The interface to the Regional processor bus is called the RP bus adapter (RPA). The RPA is basically a regional processor with its own unique address. That is adapted to the tasks of helping the main processor in IOG 11 in its communication with the CDP and vice versa. The controlling unit in IOG 11 is a processor called the Support Processor (SP). The SP contains a considerable amount of software and has an internal memory of 32 Mbytes (MB). Furthermore, a large amount of data required by the SP is stored on the hard disks and used by the SP when required. The CP also contains a fairly large amount of software used by IOG 11. As can be seen, the RPA and SP are duplicated in the standard IOG 11 configurations. This is done as precaution against faults (HW or SW) arising in one of the SPs the two SPs are connected by a bus called the ICB (inter Computer Bus). The ICB allows data to be transferred between the two SPs. It is an 8 bit parallel bus and carries data at a maximum nominal rate of 64 Kbytes/s.
Quetta Telecom College Quetta
The SP is often called Node (as it can be used as a node in a packet switched data network). The Nodes are in duplicated configuration shown above are designated Node A and Node B. The RPA is also called Link, as it is a link between the SP and the CP. The link at Node A is called Link 0 and has Rp-1 and the Node B is called Link 1 and has RP-4. The IO devices shown in the figure are as follows. AT ALI HD FD MT DL Alphanumerical Terminal Alarm interface Hard Disk driver Flexible Disk driver Magnetic Tape driver Data Link
An IOG 11 as described above with two nodes each controlling a number of IO devices - is called a support processor. SPG A Support Processor Group is shown in figure below.
CP SP ICB SP
RPB
SPG It is possible to connect up to four SPGs to the CP, as is shown in figure below.
RPB-A RPB-B SP
ICO ICB
SP
ICB
SP
ICB
SP
SP
SPG-O
SP
SPG-1
SP
SPG-2
SP
SPG-3
Four SPGs connected to RP Bus As can be seen form the figure, each SPG is numbered, with the first SPG being designated SPG-0. Most AXE exchanges with IOG 11 will require just one SPG, i.e. SPG-0, whereas exchanges requiring very large amounts of output data storage and transfer would require two or three SPGs.
Quetta Telecom College Quetta
SPG-1, SPG-2 and SPG-3 provide basically separate processors for handling such data. They thus relieve the workload of the SPs in SPG-0, which can thus be used to handle the alphanumeric IO devices and alarms. The data stored in these SPGs is normally Toll Ticketing data, which is subsequently transferred to remote destinations on high data links or transferred to tape. Subsystem in IOG 11 The following subsystems belong to IOG 11: SPS MCS FMS DCS Support Processor Subsystem Man Machine Communication Subsystem File Management Subsystem Data Communication Subsystem
Support Processor Subsystem (SPS) General SPS implements the program control of the Support Processor, the SP-CP communication function and maintenance for the SP and RP Bus Adapter RPA. SPS consists of the following components: The Support Processors (SPs) with their operating system. The regional Processor bus Adapter (RPAs) Software for communication between CP and SP Software for operation and maintenance functions for the SPG.
SPS inter works with the following subsystems: Central Processor Subsystem (CPS). Regional Processor Subsystem (RPS). MCS, FMS, DCS and with several APT subsystems.
At loading or reloading of an SP, a PROM-stored bootstrap is used to initiate loading of the SP operating system and software into the primary memory of the SSP from the hard disk. During start up of IOG 11 the software is first transferred to the hard disk from a number of diskettes. Thus the hardware of SPS is the SP and RPA magazines. The Software of SPS The SPS software is situated in the CP, SP and RPA. In the SP the functions bocks of all the subsystems are divided into units called modules. The modules are written in a real time, high-level language called EriPascal. As mentioned above, the SPS contains the operative system of the SP and software for handling both CP-SP communication and maintenance of the SPG. CP-SP Communication Communication between the RPA and the CP is in accordance with the OSI Model for data communication. The OSI Model principles lie outside the scope of this module and will not be covered here. Communication between the RPA and the SP uses Direct Memory Access (DMA) which allows the SP to read and write directly form and to the memory of the RPA.
Quetta Telecom College Quetta
The CP sees each of the RPAs as an RP and chooses either one when sending signals to a function block in the SP. Normally the CP takes the direct path via the RPA in the EX node side, but can also access this node via the other RPA over the ICB if necessary. A blocked or separated RPA in the EX node are examples of such a case. The SP would take the same path for communication in the opposite direction. Man-Machine Communication Subsystem (MCS) MCS supplies the man machine interface for operation and maintenance. MCS handles two types of information: Alphanumeric information (commands, printouts) Alarm information (internal, external).
The subsystem consists mainly of software mostly in the CP, but also in the SP but some hardware does exist: The alarm interface (ALI) The alarm panel(s). MCS inter works with FMS (File Management Subsystem), which provides storage media for the Transaction Log and for some printouts. MCS also inter works with SPS and DCS (Data Communication Subsystem). This inter work saves three main purposes: Communication between SP and CP (SPS) (transfer of commands/printouts) Communication with the terminals (DCS) Operation & maintenance of the terminals (DCS).
The terminal interfaces belong to DCS. File Management Subsystem (FMS) FMS incorporates hardware and software of handling the external mass storage of AXE. The software of FMS is loaded both in the CP and the SP. The hardware consists of mass storage Winchester hard disks complemented with the file devices, for diskette devices, for magnetic tape drives. FMS inter works with SPC, MCS, DCS and a number of file users in other different subsystems. The Hardware of FMS The hardware of FMS consists of one Mass Storage Magazine (MSM). The MSM contains hard disk drives (HDs) and flexible disk drives (FD). The hardware also consists of Magnetic Tape Group (MTG 10) and Optical Disk Drive. Data Communication Subsystem (DCS) Data communication Subsystem (DCS) supplies data communication support for operation and maintenance applications in AXE 10. DCS is transparent to all data entering or leaving the IOG via the terminals and data link. The structure of DCS is based on the ISO Open Systems International (OSI) model, i.e. a layered structure for data communication that is in general use today.
Quetta Telecom College Quetta
DCS resides entirely in the Support Processor (SP), unlike the other three subsystems which exist in both the CP and SP, Data from ATs or data links enters the system via DCS functions accesses ASPS directly. This inter work serves three main purposes: Basic software maintenance of DCS (SPS) Storage of DCS dependent data (FMS) Operation and maintenance procedures (MCS) DCS offers communication services and provides interfaces to data network users. It provides network services comparable to a stand-alone x.25 packet switching system, which allows connection to external X.25 equipment and X.25 networks. An SP in IOG 11 operates from the DCS point of view as a switch or Communication Module (CM) in a packet switched data network. A CM is a logical concept. It defines logically the presence of DCS in the node (i.e. SP). Within an IOG 11 each CM is numbered internally: in SPG-0, node A is associated with CM1, node B with CM-2. it should be noted that in SPG-1, node-A is associated with CM-17, node-B with CM-18 etc. To the operation and maintenance engineer the CM concept is only of importance when designating the HW interfaces used by DCS. DCS also provides an alphanumeric terminal interface based on X.28/X.3/X.29 recommendations for the connection of asynchronous terminals to synchronous X.25 equipment. The Hardware of DCS The Hardware is realized in the boards of a Line Unit (LU), the only hardware function block. The line units contain the interfaces to the alphanumeric terminals and data links. Local Mode and CPT Commands As has been seen so far, all commands concerned with an SP both entry and subcommands are sent to the CP from the SP. The subcommands are directed by the CP back to the SP or to an SP in another SPG. However, the possibility exists to send commands to the SP which do not go on to the CP, but are handled directly by the SP. To be able to do this, two conditions must be satisfied: One can access the SP in local mode at any time, even if the CP is running, but obviously there is no reason to do this. The number of commands that can be addressed to the SP alone is limited. The main use of local mode is to be able to access the SP when the CP is unavailable for some reason. Thus, if the CP should become seriously faulty and IO commands are not accepted, then access to the system using local mode must be used to initiate a recovery process. Within the SP software exists the function block CPT (central Processor Test system). This software a number of Maintenance Subsystem modules allows us to access CPT hardware in the CP in order to facilitate testing a loading of the CP from hard disk. To do this we must use a set of CPT commands. To be able to give CPT commands then the SP must be accessed in local mode. To use local mode a command is used: MCLOC. Access in local mode can be made from any terminal having authority for this command. At loss of contact with the CP for any reason, following message is given. CP Not Obtainable, Enter EXIT or MCLOC
Quetta Telecom College Quetta
The command MCLOC will always be accepted provided that the SP is running. The sequence is given below: A master user and password are defined in the initial data but can be removed by the administration. Commands can now be given to the support processor in the own SPG. It should be noted that MCS and DCS subcommands require no entry command when one is in local mode. The entry command for these subsystems (IMLCT) is a general entry command and is not required in local mode. It cab be given, however, without causing any problem. The subsystem FMS has its own specific entry command and thus with this subsystem the entry command must be given when FMS is to be accessed in local mode. The subsystem SPS is not accessible from local mode. Making use of the local terminal mentioned above can also attain local mode. IF, for instance, all Line Units are blocked then no access can be made to the system via the IOEXT magazines. A terminal connected to the CPU board in the SP could be used to give SP commands to deblock the LUs. When entering local mode using a local terminal then the command MCLOC is not required. The AT should be working teletype mode (TTY) in this case and for certain functions capital letters should be used. An important difference to notice between normal mode and local mode of access is that when a terminal has to be released in local mode then the command EXIT must be used. To return to local mode the command MCLOC must be used again. Line Unit Status Before looking at Line Unit status the designation of Line Units must be explained. An LU is designated as follows: LU = CM LM LU CM= Communication Modules LM= Line Module (=1OEXT magazine) In the above designation, CM represents the first CM in the CM pair. (The CM pair corresponds to the node pair). Thus for a normal IOG 11A-C, for all Line Units in both 1OEXT magazines: If SPG=0 If SPG=1 If SPG=2 If SPG=3 CM is always 1 CM is always 17 CM is always 33 CM is always 49
LM or Line Module is an older name for 1OEXT magazine. On the node A side, 1OEXT A implies LM = 1 On the node B side, 1OEXT B implies LM = 2 Thus the designation of the third LU in the B Node side in SPG-0 is LU = 1 2 2 A Line Unit can have the following states:
Quetta Telecom College Quetta
Working Manual Blocked Automatic Blocked Hardware Blocked Control Blocked (WO) (MB) (AB) (HB) (CB)
Ports Data Ports are designated in the same way as Line Units with the port number within the LU included in the designation: PP=CM LM LU PP NP=CM LM LU- NP A Network Port (NP) or Physical Prot (PP) can have the same states as a Line Unit. On definition, a port is manual blocked and on deblocking the port becomes working if a terminal or data link is connected to it. If no terminal or data link is connected then the port becomes automatic blocked (AB).
FMS Concepts
Storage Concepts The storage medium for external data storage consists of the hard disk drives, flexible disks and magnetic tapes. Volume A volume is a logical unit that exists on the storage medium. That is a medium can be divided up in to volumes. Volumes on disks can be defined as being a part of one disk or they can cover several disks. On a physical hard disk there are max four volumes, on flexible disks and tapes there is only one volume per media. File Files are stored in volumes. A file is a number of records that are treated as one unit. A record is in turn an amount of associated data that is treated as one unit. Record Records are of predefined lengths and, in certain file types are divided into fields. Subfile Subfiles are files which belong to a parent file and have the same structure. Files in FMS belong to one of three file classes: Composite (CMP) Simple (SL) Device (DEV) A composite file is a file on hard disk that consists of subfiles. A simple file is a file on hard disk. A device file is a file pointing out a file device (Flexible Disk drive or Magnetic Tape drive) where files are located. One unique device file must be defined for each device. The device file names should be defined as: FD0A1 for FD-1 in the A node FD0B1 for FD-1 in the B node MT0A1 for FD-1 in the A node MT0A1 for FD-1 in the B node The different files on the file devices (FD/MT) are subfiles to the device file.
Quetta Telecom College Quetta
File type can be one of the following types: Sequential (SEQ) Direct Access (DIR) Keyed Access (KEY) Sequential files are files written in chronological order. Each new record is written in sequence after the previous one. Reading of the records from a sequential file is done in the same order as they were written. Direct Access files consist of a finite number of records where each record is given a record number. Reading and writing in the file is done directly using the record number, thus, giving rise to fast access times. A keyed access file in FMS consists of two component files, a random access file containing the data and an index file. The index file is built up using the contents of a given file in each record of the random access file. This field in the random access file is called a key field and its contents called a key. The key must be a unique value and can be either a number or a name. When a new record is added to the random access file, the contents of its pre-defined key field together with the record number of the required record in the random access file are inserted into the index file. The random file is unsorted i.e. the data can be added at random in any vacant record. The index file is stored on the key, either numerically. (e.g. telephone number) or alphabetically. The addition of a record to the random access file causes a new record to be inserted into the index file. At data retrieval keyed access files give very fast access. They are used when searching very large files. Keyed access files are used for searching functions in Operator subsystem OPS) e.g. searching for the tickets used in setting up delayed calls so that these calls may be processed at the correct time. Also keyed access files are used extensively by the SP itself in the SP system file.
Functions of FMS
The functions of FMS can be divided into: File functions Service functions File processing Search in sequential files Infinite sequential files Command log Backup Functions of the CP Manual Dumps Updating the system backup files is done in connection with a size alteration, functional change or a program correction. Updating of the system backup files is also done as a routine job. The command SYBUP dumps all information in the CPs main store i.e. Program store, Reference store and Data store via the Support processor to a file on the hard disk. It is particularly important to dump some type of data regularly so that the information will not be lost in the event of a serious fault (stoppage). This is done at automatic dumps.
Quetta Telecom College Quetta
Automatic Dump There are two types of automatic data dumps, large and small, which are performed at times specified by command SYBTS in the operational instruction Specification of output times. <SYBTS:TIME=time, TDMI=tdmi; Time= Time for large dumps TDMI= Time duration in minutes: The interval between two dumps. The automatic dumping function has to be activated by command SYBUI and deactivated by SYBUE. Data which are normally changed by command and changes done occasionally are dumped at large dumps. These data are changed, for example, when an operator connects a new customer line, adds a trunk or changes an alarm threshold. A change of this kind can also be done by a customer using a subscriber feature e.g. ordering a wake up call. When making these types of changes, the values of so called reload marked variables are altered. These reload marked variables are dumped at a large auto dump. This type of dump is normally performed once in away. Charging information i.e. call meter values, changes all the time. This charging data is dumped in small dumps several times a day. The data in main store is automatically dumped is written into a special file on the hard disk. The name of this file is RELFSW0. The Backup File There are at least three backup files on the hard disk. The backup files belong to the volume RELVOLUMSW. The file names are RELFSW0, RELFSW1 and RELFSW2. They contain three different generations of backup files which are manually dumped at different times. RELFSW0 is the latest version and RELFSW2 is the oldest. A backup file is a composite file with six subfiles named R0, R1, R2, R3, R4 and R5. The subfile R0 contains control data for administration of other subfiles such as information indicating the subfiles to be loaded in the event of a reload. The subfiles R1 ad R2 contain different version of charging data obtained on different dumping occasions. The dumping operation alternates between the two subfiles where the older version is overwritten with new data. These data are dumped at small dumps. In case of a reload the newest small dump will be loaded into the system. The subfiles R3 and R4 contain reload marked variables, i.e. variables to be loaded in conjunction with a reload. These variables contain all information about subscriber data, route data etc. R3 and R4 contain different version of data dumped at different times at large dumps. For security reasons, the older large dump will be loaded into the system, if a reload occurs as it is less likely to contain a data fault that may have causes the reload. The subfile R5 contains a copy of the Program store and Reference store which are only dumped at manual dumps. This is the largest subfle. R5 is always loaded at a reload.
Backup Handling
A minimum of two hard disks are needed for system backup. This provides hardware redundancy in case of disk failure. Software redundancy is achieved by storing a minimum of three backup generations on each disk.
Quetta Telecom College Quetta
The automatic dumping goes into RELFSW0 in both hard disks. Thus RELFSW0 is always kept up to date with the latest information. This file is also loaded in case of an automatic reload. To keep the file free in case of an automatic reload, manual dumps cannot be made to RELFSW0. A manually initiated dump creates a new backup generation. This dump will overwrite one of the backup files RELFSW1 or RELFSW2, depending on the parameter value used when ordering the dump. Normally the manual dump is made on the oldest backup file, i.e. RELFSW2.
Auto dump
RELFSW0 RELFSW1 RELFSW2
Reload
Man dump
With commands the file names can be rotated and changed so that, for instance, the latest manual dump file will be renamed RELFSW0 and become the automatic backup file. Command SYTUC can be used for name rotation of system backup files if RELFSW2 is newer than RELFSW0 and RELFSW0 is not empty. SYTUC is normally used after a manual dump to RLFSW2. RELFSW0 RELFSW1 RELFSW2
Command SYNIC can be used to change the file names when RELFSW3 is newer than RELFSW0 or RELFSW0 is empty. SYNIC is normally only used at the first load of the exchange when, after the first manual dump, RELFSW2 is renamed RELFSW0. <SYNIC; There is a third way of rotating the files. With command INFIC the back up files can change names or the given any name. This command should not be used in a live exchange to rename backup files because for a short time there might not be a file called RELFSW0 (the automatic reload file). This method is very useful during installation test or in a test plant environment where the conditions for sending the command SYTUC or SYNIC are not satisfied. Example: <INMCT: SPG=0; INFIC: FILE1=RELFSW0, FILE2=RELFSWX; EXECUTED INFIC: FILE1=RELFSW5, FILE2=RELFSW0; EXECUTED INFIC: FILE1=RELFSWX, FILE2=RELFSW5; EXECUTED
Quetta Telecom College Quetta
This example could have been where an older generation has been loaded into RELFSW2 from a magnetic tape, but is required to be in RELFSW0, and commands SYTUC and SYNIC could not be used. Note that the commands SYTUC and SYNIC are part of the System Backup function and can only be used with the files RELFSWn. The command INFIC can be used to rename any file and is thus a useful command.
Conversion of system backup files
Copying a system backup file from the hard disk to a portable medium (FD, MT) and vice versa is called conversion. To copy backup files from the hard disk to tape or diskettes is a routine procedure performed by the maintenance personnel. This operational instruction also covers the procedure to copy from tape or diskette to hard disk. It should be noted that conversion, just like manual dumping, cannot be performed with RELFSW0 since this backup file is reserved for automatic dumping and loading functions.
Command Log
The command log in the exchange is used for logging of certain commands and subscriber services ordered from a telephone set (these services are translated into commands). The command description tells us whether a command is logged or not. Changes in the exchange data are automatically stored in command log file in the form of commands.
WinFiol
Introduction
FIOL (File transfer and on-line program) for Windows NT, or WinFIOL for short, is a man machine communications program designed for operation and maintenance, installation testing of customer exchanges such as AXE and MD110. WinFIOL includes multi-channel communications a powerful editor for command files and log files, a script language and a macro language as well as several other features.
Application Unit
Overview Reasons for using WinFIOL: WinFIOL is the most powerful easy to use and intuitive tool for operation maintenance and testing of AXE and MD exchanges. It is developed in close relation with end-users to ensure customer satisfaction. WinFIOL features and functions are designed to free the operators time for the most important tasks instead of memorizing commands and routines. WinFIOL command terminal application is a communication program for handling Man-to-Machine Language (MML) commands towards IOG II (AXE). IOG 3 (AXE), MD 110 and Eripax. The functionality of command terminal application ensures efficient and easy operation and maintenance (O&M) work in routine tasks as well as in special operations. Embedded editor, error-handling functions, and several customizing features are integrated in the application. The WinFIOL command terminal application is particularly useful in testing and O&M environments.
Quetta Telecom College Quetta
WinFIOL Functions
The following functions are supported by WinFIOL Sending MML commands and receiving MML printouts. Multiple MML channels to the exchanges. Specific target exchange drive e.g. IOG 11 (AXE) and MD 110. Several communication drivers E.G.RS 2342 and Telnet A powerful editor Browser support to allow exchange library documentation lookup with AXE Library Explorer, Dyna Text and Doc View, KRS Win. Script language Macro language. Plug-in modules Monitoring module Scheduler for command and script files Support for dangerous commands Several logging functions for commands and printouts Comprehensive application Help and context sensitive Help
Pre-Conditions:
Processor 486 or higher (Pentium 120 MHz or better recommended) Operating System: Windows95 or Windows NT 4.0. The user of the WinFIOL needs to be familiar with the MML language of the specific exchange type (AXE, MD 110 or other) the user also needs to be familiar with the Microsoft Windows graphical user interface.
FUNCTIONAL DESCRIPTION
Channels
The entity responsible for communication towards a target exchange is called a channel which is represented by a channel window.
Command Handling
WinFIOL primary function is to send MML commands and receive printouts. WinFIOL has extremely strong command handling capabilities. It is highly configurable, stable and allows a very good user control. WinFIOL supports error detection, error collection ( in a message window ) and allows error correction by the user.
Command Files
One or more MML commands (and script commands) can be sent from a command file window. Command files or the scheduler. Any ASCII text file can be loaded in a command file window. This text (typically AXE or MD110 commands) can be edited, saved and sent to a channel (i.e. Target exchange)
Communication Drivers
The communication protocols are implemented in special drivers. Similarly target exchange support is implemented in other drivers. All drivers are DLLs that can be loaded dynamically. The communication protocol determines the means of data transportation WinFIOLi supplied with drivers for RS 232 without modem support. RS 232 with modem support and Telnet using TCP/IP. Other protocol drivers like MTP/X29 for X.25 can be installed separately.
Quetta Telecom College Quetta
The target exchange type specifies to what type of target exchange the channel is connected. WinFIOL supports the target types APG 30 (AXE), IOG 11 (AXE), IOG 3 (AXE), MD110 and Eripax 65.
Editor
All command file windows have a powerful editor. The editor is especially designed for editing exchange data. The editor in the input window ( input panel of the channel window ) is line oriented and does not support undo and any actions that merge or delete lines.
Log Files
An output log file can be opened for every channel. The log file contains information about all received data. Several other log files can be defined. Out put log, -active to printer Input log, - log to printer. Daily log, - (monitoring module)
Hotkeys
WinFIOL has eight function keys that have the same functionality as FIOL, (except F1 which now is Help according with Windows standard) Altogether, there are 67 non-configurable hot keys. Up to 28 extra function keys can be assigned by the user to an AXE /MD110 command or macro. All hot keys are application global, i.e. they can be used anywhere.
Macros
There is a macro language for accessing various functions in Win FIOL; a macro can be written in any text editor and complied by Wino after loading it to the command file window. After compiling a macro that is being used by a user button on the tool bar, the tool tip text of that button is updated to reflect any changes in the macro.
Plug-in Modules
WinFIOL has a plug-in module concept where a module can be installed as a separate product and interact with WinFIOL. The plug-in modules can have their own user interface. Examples of plug-in modules are the Monitoring Module, Active printouts, Dangerous Commands and Command Forms (not part of WinFIOL).
Monitoring Module
The Monitoring Module is a plug in, which enables you to determine an action to be performed for a specified printout in the target exchange.
Phone book
WinFIOL has a phone book that can be used to connect a target exchange or disconnect. It is used when dialing (using modem protocol) running macros and sending MML commands.
On -Line Help
WinFIOL is supplied with an on-line, context sensitive help system. All help pages have many hyper links. WinFIOL functionality is extensively described in the help system.
Scheduler
The scheduler provides functionally to send a command file at a set date and time. Command files can be sent periodically using one of several interval types-daily, weekly etc. The scheduler provides a list of command files which are scheduled to be sent indicating date, time and destination. Changes can be made to any of these parameters.
User defined dangerous commands
WinFIOL supports user defined dangerous commands. A user can associate a massage with a command which will be displayed whenever that command is transmitted from the command
Quetta Telecom College Quetta
line. Inexperienced users can thus be aided to prevent them from sending in appropriate commands.
Script Commands
Script commands are commands that start with the @ character. Script commands are put in command files and they perform special actions when being transmitted. It is possible to ignore script commands during transmission.
RELFSW0 RELFSW1 RELFSW2
Das könnte Ihnen auch gefallen
- Axe 10Dokument40 SeitenAxe 10Mukesh Kumar Kurdiya100% (7)
- Overview of AXE-10 System: By: Sukh Dev Raj D. E. (AXE-10)Dokument58 SeitenOverview of AXE-10 System: By: Sukh Dev Raj D. E. (AXE-10)Mukesh Kumar Kurdiya100% (2)
- Axe 10 (A)Dokument50 SeitenAxe 10 (A)Raina MimiNoch keine Bewertungen
- Ericsson Axe PlatformDokument27 SeitenEricsson Axe Platformtongai_mutengwa5194100% (1)
- AXE IntroductionDokument21 SeitenAXE Introductionsenjamir100% (1)
- H5.2 - 5ESS Switch Features OverviewDokument27 SeitenH5.2 - 5ESS Switch Features OverviewmanjtobssNoch keine Bewertungen
- AXE Central Processor APZ 212 40: Maximizing Call Processing CapacityDokument5 SeitenAXE Central Processor APZ 212 40: Maximizing Call Processing Capacityledungvms0% (1)
- AXE Equipment Management: User GuideDokument61 SeitenAXE Equipment Management: User GuideNosa Okunrobo100% (1)
- AXE 10 System Testing - Subscriber Services SubsystemDokument54 SeitenAXE 10 System Testing - Subscriber Services Subsystemqv1985100% (1)
- EWSD Digital Switching System OverviewDokument57 SeitenEWSD Digital Switching System Overviewjingjongkingkong100% (1)
- AXE BSC board port positionsDokument12 SeitenAXE BSC board port positionsvikram_singh_210100% (1)
- Backup and recovery procedures for telecom networkDokument21 SeitenBackup and recovery procedures for telecom networkvikram_singh_21067% (3)
- Ericsson Axe 810 - GMSCDokument29 SeitenEricsson Axe 810 - GMSCKumar SenthilNoch keine Bewertungen
- Ericsson AXE 810 Offer enDokument4 SeitenEricsson AXE 810 Offer enEnokela Onoja PiusNoch keine Bewertungen
- BSCDokument120 SeitenBSCOsama Abbass100% (2)
- DMS100 Technical Specification PDFDokument858 SeitenDMS100 Technical Specification PDFWissem WissemNoch keine Bewertungen
- Over View of Ocb283Dokument118 SeitenOver View of Ocb283Subin KalaryNoch keine Bewertungen
- Ericsson RNC3820Dokument6 SeitenEricsson RNC3820Saqib JabbarNoch keine Bewertungen
- ALU ManualDokument886 SeitenALU Manualdilligas1234Noch keine Bewertungen
- Ericsson AXE 810Dokument4 SeitenEricsson AXE 810Kao Sun HoNoch keine Bewertungen
- Clock Synchronization of BSC ExternallyDokument9 SeitenClock Synchronization of BSC ExternallyNguyen Xuan NhamNoch keine Bewertungen
- Alcatel Lucent RRH 9341 PDFDokument12 SeitenAlcatel Lucent RRH 9341 PDFPhuongLeNoch keine Bewertungen
- Hardware SSNC Modules and ArchitectureDokument68 SeitenHardware SSNC Modules and Architecturefiras1976Noch keine Bewertungen
- Huawei RNC Parameter ReferenceDokument1.783 SeitenHuawei RNC Parameter Referencerdmiguel_19836100% (2)
- Other Error Allocating Carrier WCDMA BW 4200 Fullband Adding Carrier To Carrier List Failed! Mixed Mode With Other MEDokument10 SeitenOther Error Allocating Carrier WCDMA BW 4200 Fullband Adding Carrier To Carrier List Failed! Mixed Mode With Other ME3GSERO100% (1)
- HW Differences Between Apg40 Apg43Dokument7 SeitenHW Differences Between Apg40 Apg43sanjNoch keine Bewertungen
- Huawei 3G RNC 2G BSC TrainingDokument2 SeitenHuawei 3G RNC 2G BSC TrainingHasan100% (2)
- Zte BSC Hardware Presentation 159843Dokument53 SeitenZte BSC Hardware Presentation 159843Rakesh MadaanNoch keine Bewertungen
- Zte BSC Hardware PresentationDokument53 SeitenZte BSC Hardware PresentationNgoy Saro100% (2)
- AXE 810 Inro-1Dokument8 SeitenAXE 810 Inro-1Ajaykumar SinghNoch keine Bewertungen
- Ericsson - WCDMADokument9 SeitenEricsson - WCDMABassem AbouamerNoch keine Bewertungen
- Ewsd Overview One DayDokument58 SeitenEwsd Overview One DayWaqar AsmatNoch keine Bewertungen
- Ericsson 2G CommangsDokument2 SeitenEricsson 2G CommangsbettyNoch keine Bewertungen
- EwsdDokument13 SeitenEwsdEngr Gohar MumtazNoch keine Bewertungen
- AXE 810 Basics and EvolutionDokument14 SeitenAXE 810 Basics and EvolutionAkhil ChandelNoch keine Bewertungen
- Hand Outs of SDH Basics (1) IntroductionDokument32 SeitenHand Outs of SDH Basics (1) IntroductionKarthikeyan PandianNoch keine Bewertungen
- UMTS-BTS-Fault-Analysis 2020 PDFDokument516 SeitenUMTS-BTS-Fault-Analysis 2020 PDFNaftal MassingueNoch keine Bewertungen
- Iub Over SatelliteDokument7 SeitenIub Over SatelliteSiva KumarNoch keine Bewertungen
- TK145 - Rel 41.1 - v9.8 Student GuideDokument385 SeitenTK145 - Rel 41.1 - v9.8 Student GuideCung LevanNoch keine Bewertungen
- APG40 Health CheckDokument3 SeitenAPG40 Health CheckShah ArifNoch keine Bewertungen
- ISAM R2.2 CLI Command GuideDokument923 SeitenISAM R2.2 CLI Command GuideNesa Vidojevic100% (4)
- TN4XE System Description PDFDokument310 SeitenTN4XE System Description PDFgluzdovNoch keine Bewertungen
- BB Alarm ListDokument3 SeitenBB Alarm ListSumit SaxenaNoch keine Bewertungen
- SJ-20100211152857-006-ZXWN MSCS (V3.09.21) MSC Server Data Configuration Guide (MSCS)Dokument396 SeitenSJ-20100211152857-006-ZXWN MSCS (V3.09.21) MSC Server Data Configuration Guide (MSCS)adeepcdma50% (2)
- ZTE ZXMP S325 Datasheet PDFDokument3 SeitenZTE ZXMP S325 Datasheet PDFGeovanyNoch keine Bewertungen
- CCS7 (Isup)Dokument120 SeitenCCS7 (Isup)dayoladejo777Noch keine Bewertungen
- TOPEX SIMSERVER Installation enDokument50 SeitenTOPEX SIMSERVER Installation enmario_iv1Noch keine Bewertungen
- GPRS For 2 Hours TrainingDokument105 SeitenGPRS For 2 Hours Trainingh_hadidiNoch keine Bewertungen
- Making Telecoms Work: From Technical Innovation to Commercial SuccessVon EverandMaking Telecoms Work: From Technical Innovation to Commercial SuccessNoch keine Bewertungen
- VoLTE and ViLTE: Voice and Conversational Video Services over the 4G Mobile NetworkVon EverandVoLTE and ViLTE: Voice and Conversational Video Services over the 4G Mobile NetworkNoch keine Bewertungen
- Mirror Demo Application PDFDokument6 SeitenMirror Demo Application PDFkakathiNoch keine Bewertungen
- 01 01 CT53331EN53GLA0 RNC Architecture and FunctionalitiesDokument71 Seiten01 01 CT53331EN53GLA0 RNC Architecture and FunctionalitiesDragos SmoleanuNoch keine Bewertungen
- Axe 10Dokument8 SeitenAxe 10Vinay Gadekar100% (1)
- Operations Support Systems (Osss) : Web Proforum Tutorials The International Engineering Consortium 1/24Dokument24 SeitenOperations Support Systems (Osss) : Web Proforum Tutorials The International Engineering Consortium 1/24Gaurav PathakNoch keine Bewertungen
- Prepared By: DR - Ahmed BaalehDokument14 SeitenPrepared By: DR - Ahmed Baalehscribdkhatn100% (1)
- CAN Configuration Within AutosarDokument6 SeitenCAN Configuration Within Autosarmail87523Noch keine Bewertungen
- Ericsson Openness in AXEDokument10 SeitenEricsson Openness in AXEyahoo234422Noch keine Bewertungen
- What Is A Distributed Control System?Dokument62 SeitenWhat Is A Distributed Control System?Kharol A. Bautista100% (1)
- Factory Overhead - RFDDokument32 SeitenFactory Overhead - RFDSamantha DionisioNoch keine Bewertungen
- ElearningDokument1.488 SeitenElearningsudhansu0% (1)
- Wiring 87T E01Dokument4 SeitenWiring 87T E01Hau NguyenNoch keine Bewertungen
- Non-Ferrous Metal SmeltingDokument47 SeitenNon-Ferrous Metal SmeltinggtdomboNoch keine Bewertungen
- Dr.A.P.Sastri: Software Project Management Bob Hughes and Mike Cotterell: Book 1 Unit - 1 Page Nos: 1-36Dokument30 SeitenDr.A.P.Sastri: Software Project Management Bob Hughes and Mike Cotterell: Book 1 Unit - 1 Page Nos: 1-36Dr. A. Pathanjali Sastri0% (1)
- Dr. Amen Penquin AnalogyDokument64 SeitenDr. Amen Penquin AnalogyStephanie StarkNoch keine Bewertungen
- Flood Studies 2010Dokument13 SeitenFlood Studies 2010Sarath VkNoch keine Bewertungen
- 10 Simultaneous - in - Situ - Direction - Finding - and - Field - Manipulation - Based - On - Space-Time-Coding - Digital - MetasurfaceDokument10 Seiten10 Simultaneous - in - Situ - Direction - Finding - and - Field - Manipulation - Based - On - Space-Time-Coding - Digital - MetasurfaceAnuj SharmaNoch keine Bewertungen
- Approach To NEA V0.3Dokument16 SeitenApproach To NEA V0.3mohammedomar1974Noch keine Bewertungen
- Socio-Economic and Government Impact On Business: Lesson 4.4Dokument18 SeitenSocio-Economic and Government Impact On Business: Lesson 4.4racelNoch keine Bewertungen
- Balochistan Wildlife Rodini KachoDokument17 SeitenBalochistan Wildlife Rodini KachoMohammad Yahya MusakhelNoch keine Bewertungen
- It Complaint Management SystemDokument26 SeitenIt Complaint Management SystemKapil GargNoch keine Bewertungen
- Affidavit of LossDokument2 SeitenAffidavit of LossmigsNoch keine Bewertungen
- BRCC Selection Policy HP Sept 2014 by Vijay Kumar Heer PDFDokument7 SeitenBRCC Selection Policy HP Sept 2014 by Vijay Kumar Heer PDFVIJAY KUMAR HEERNoch keine Bewertungen
- Network File SystemDokument29 SeitenNetwork File SystemYosef TayeNoch keine Bewertungen
- Process Maps and Turtle DiagramsDokument1 SeiteProcess Maps and Turtle Diagramskyle1991100% (1)
- Data Sheets DW Instrumentation 1590398977404Dokument39 SeitenData Sheets DW Instrumentation 1590398977404leonardseniorNoch keine Bewertungen
- Industrial Coatings: Recommended ProductsDokument2 SeitenIndustrial Coatings: Recommended ProductsAPEX SONNoch keine Bewertungen
- Documentation Matrix DS QMS 00 R2Dokument19 SeitenDocumentation Matrix DS QMS 00 R2DhinakaranNoch keine Bewertungen
- 349 Advance Us CT Boiler DesDokument6 Seiten349 Advance Us CT Boiler DesRobin IndiaNoch keine Bewertungen
- Financial Ratio AnalysisDokument8 SeitenFinancial Ratio AnalysisrapsisonNoch keine Bewertungen
- Heat Round Grade 2 HKIMO: Part I: Logical ThinkingDokument6 SeitenHeat Round Grade 2 HKIMO: Part I: Logical ThinkingThu Thủy NguyễnNoch keine Bewertungen
- Ala CalculationDokument4 SeitenAla CalculationAgus SupriadiNoch keine Bewertungen
- 6420B: Fundamentals of Windows Server® 2008 Microsoft® Hyper-V™ Classroom Setup GuideDokument17 Seiten6420B: Fundamentals of Windows Server® 2008 Microsoft® Hyper-V™ Classroom Setup GuideVladko NikolovNoch keine Bewertungen
- Project ReportDokument61 SeitenProject Reportlove goyal100% (2)
- Pembangunan Modal Insan Perspektif Pengurusan IslamDokument26 SeitenPembangunan Modal Insan Perspektif Pengurusan IslamMujiburrahmanNoch keine Bewertungen
- Thursday: Dhaka Electric Supply Company Limited (DESCO) Load Shedding Schedule On 11 KV FeedersDokument16 SeitenThursday: Dhaka Electric Supply Company Limited (DESCO) Load Shedding Schedule On 11 KV FeedersaajahidNoch keine Bewertungen
- Unit I Fundamentals of Computer GraphicsDokument25 SeitenUnit I Fundamentals of Computer GraphicsChockalingamNoch keine Bewertungen
- PGP-AIML Curriculum - Great LakesDokument43 SeitenPGP-AIML Curriculum - Great LakesArnabNoch keine Bewertungen
- Example of A Chronological CVDokument2 SeitenExample of A Chronological CVThe University of Sussex Careers and Employability CentreNoch keine Bewertungen