Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Seatel Dac-2200 Operation PDFDokument76 SeitenSeatel Dac-2200 Operation PDFIonut NeamtuNoch keine Bewertungen
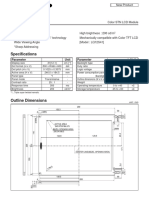
- Features: Parameter Unit Parameter UnitDokument1 SeiteFeatures: Parameter Unit Parameter UnitEliecer MenesesNoch keine Bewertungen
- MCRNC Architecture and ConfigurationsDokument65 SeitenMCRNC Architecture and Configurationskone mounaNoch keine Bewertungen
- Global Fire: Addressable Zone Monitoring UnitDokument1 SeiteGlobal Fire: Addressable Zone Monitoring UnitGabrielNoch keine Bewertungen
- 13 - Ansys Maxwell 3D vs. FEMAG 2D.LaubeDokument18 Seiten13 - Ansys Maxwell 3D vs. FEMAG 2D.LaubeRamnik SinghNoch keine Bewertungen
- TO-92 塑封封装 PNP 半导体三极管。Silicon PNP transistor in a TO-92 Plastic Package. Dokument6 SeitenTO-92 塑封封装 PNP 半导体三极管。Silicon PNP transistor in a TO-92 Plastic Package. Smart ControlNoch keine Bewertungen
- TLM Model For The Lightning Transient Analysis of The GSM Base StationDokument30 SeitenTLM Model For The Lightning Transient Analysis of The GSM Base StationCesar ZamudioNoch keine Bewertungen
- Jci - 6935 2951JDokument3 SeitenJci - 6935 2951JByron RieraNoch keine Bewertungen
- Xe-145F Modbus Rev B EN-2Dokument1 SeiteXe-145F Modbus Rev B EN-2Daniel PestanaNoch keine Bewertungen
- Chapter 3: Symmetrical ComponentsDokument18 SeitenChapter 3: Symmetrical ComponentsKvv BapirajuNoch keine Bewertungen
- Authentic TextDokument2 SeitenAuthentic TextKeandre LeukesNoch keine Bewertungen
- StreetView PhilipsDokument4 SeitenStreetView PhilipsAlberto Cruz VelázquezNoch keine Bewertungen
- Amiko-7900-8000-8800 Manual - enDokument43 SeitenAmiko-7900-8000-8800 Manual - enBobBobsunNoch keine Bewertungen
- Breaker Failure Protection - HRS 2012 - Brent Carper - Presentation SlidesDokument53 SeitenBreaker Failure Protection - HRS 2012 - Brent Carper - Presentation Slidesshanks263Noch keine Bewertungen
- Pre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)Dokument3 SeitenPre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)saji kumarNoch keine Bewertungen
- 09-Humble Homemade Hifi - PhleaDokument4 Seiten09-Humble Homemade Hifi - Phleajns0110Noch keine Bewertungen
- Introduction With The WiMAX Equipments AlvarionDokument38 SeitenIntroduction With The WiMAX Equipments AlvarionSubir Chandra Mazumdar50% (2)
- Durag Dust MonitorDokument13 SeitenDurag Dust MonitorVivek KumarNoch keine Bewertungen
- 1.eti-Psi-137 LaDokument30 Seiten1.eti-Psi-137 LaTarun BhatejaNoch keine Bewertungen
- Adjustable Precision Shunt Regulators Az431Dokument20 SeitenAdjustable Precision Shunt Regulators Az431Jesús M. Marcano C.Noch keine Bewertungen
- Primamax PVT LTDDokument30 SeitenPrimamax PVT LTDSalman HashmiNoch keine Bewertungen
- ASHISH Gaur ResumeDokument2 SeitenASHISH Gaur ResumeAshish SharmaNoch keine Bewertungen
- Manual Rps 450 GB Vec626r0Dokument86 SeitenManual Rps 450 GB Vec626r0hernangyc100% (1)
- ACCBM1 Datasheet R1 PDFDokument1 SeiteACCBM1 Datasheet R1 PDFmalileoNoch keine Bewertungen
- TM9 2920 242 35Dokument110 SeitenTM9 2920 242 35Rulax MtzNoch keine Bewertungen
- Saudi Aramco Test ReportDokument8 SeitenSaudi Aramco Test Reportkarthi51289Noch keine Bewertungen
- Scatalo Duo Station Datasheet A4Dokument2 SeitenScatalo Duo Station Datasheet A4wmcNoch keine Bewertungen
- Battery Chargers Data Sheet enUS 1895966475Dokument3 SeitenBattery Chargers Data Sheet enUS 1895966475Ahmed ShawkyNoch keine Bewertungen
- Emi Zeeshan Naac CFDokument163 SeitenEmi Zeeshan Naac CFsumaiyah syedNoch keine Bewertungen