Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Special Relativity: Problems: 7.1 KinematicsDokument12 SeitenSpecial Relativity: Problems: 7.1 Kinematicsfree_progNoch keine Bewertungen
- HW3 Potential SOLNDokument23 SeitenHW3 Potential SOLNEmanuel Santa Cruz Casiano100% (1)
- Quantum Field Theory II Lectures Notes: Part IV: Spontaneous Symmetry BreakingDokument27 SeitenQuantum Field Theory II Lectures Notes: Part IV: Spontaneous Symmetry Breakingcifarha venantNoch keine Bewertungen
- 033 - PR 20 - Quartic LagrangianDokument1 Seite033 - PR 20 - Quartic LagrangianBradley NartowtNoch keine Bewertungen
- An Empirical Equation For Thermodynamic Properties of Light Hydrocarbons and Their Mixtures Ii. Mixtures of Methane, Ethane, Propane, and NbutaneDokument13 SeitenAn Empirical Equation For Thermodynamic Properties of Light Hydrocarbons and Their Mixtures Ii. Mixtures of Methane, Ethane, Propane, and NbutanelucasNoch keine Bewertungen
- Cal 11 Q3 0401 Final PDFDokument25 SeitenCal 11 Q3 0401 Final PDFKat DumpNoch keine Bewertungen
- Shell Balance and Velocity Distributions in Laminar FlowDokument7 SeitenShell Balance and Velocity Distributions in Laminar Flowtatoo1Noch keine Bewertungen
- Theory and Application of Density MatrixDokument60 SeitenTheory and Application of Density MatrixHasan Rahman100% (1)
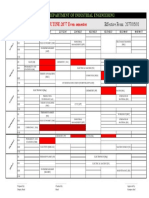
- ONLINE ROUTINE:2077 Even Semester: Department of Industrial EngineeringDokument1 SeiteONLINE ROUTINE:2077 Even Semester: Department of Industrial EngineeringBISHAL AdhikariNoch keine Bewertungen
- Statistical Thermodynamics by Erwin Schrodinger: Read Online and Download EbookDokument7 SeitenStatistical Thermodynamics by Erwin Schrodinger: Read Online and Download EbookSaurav PaulNoch keine Bewertungen
- Thermodynamics: Engr. Renel M. AlucijaDokument48 SeitenThermodynamics: Engr. Renel M. AlucijaRenel AluciljaNoch keine Bewertungen
- Calculus I - Derivatives of Hyperbolic FunctionsDokument3 SeitenCalculus I - Derivatives of Hyperbolic Functionsptfbbgwfs2Noch keine Bewertungen
- RT/PV PV RTZ (1.17) : Molecular InteractionsDokument12 SeitenRT/PV PV RTZ (1.17) : Molecular InteractionsYuliantari YuliantariNoch keine Bewertungen
- 7 Diagonalization and Quadratic FormsDokument45 Seiten7 Diagonalization and Quadratic FormsAchuan ChenNoch keine Bewertungen
- 39-Infinite Bodies-Flat Plate, Cylinder and sphere.-27-Aug-2019Material - I - 27-Aug-2019 - Infinite - Bodies - Flat - Cylinder - Sphere PDFDokument12 Seiten39-Infinite Bodies-Flat Plate, Cylinder and sphere.-27-Aug-2019Material - I - 27-Aug-2019 - Infinite - Bodies - Flat - Cylinder - Sphere PDFsiva yandraNoch keine Bewertungen
- Andrei Linde and Vitaly Vanchurin - How Many Universes Are in The Multiverse?Dokument12 SeitenAndrei Linde and Vitaly Vanchurin - How Many Universes Are in The Multiverse?Dex30KMNoch keine Bewertungen
- MTH603 Final Term Solved MCQs by JUNAIDDokument41 SeitenMTH603 Final Term Solved MCQs by JUNAIDUmerNoch keine Bewertungen
- Floquetlecture - Konrad ViebahnDokument12 SeitenFloquetlecture - Konrad ViebahnMarc de MiguelNoch keine Bewertungen
- Intro Thermo Public in Felt A PartialDokument67 SeitenIntro Thermo Public in Felt A PartialWade WattsNoch keine Bewertungen
- C4 Heat EffectsDokument25 SeitenC4 Heat EffectsJack Ho100% (1)
- Culegere PeterDokument157 SeitenCulegere PeterIoana AvramNoch keine Bewertungen
- Improving The Condition Number of Estimated Covariance MatricesDokument20 SeitenImproving The Condition Number of Estimated Covariance MatricesNatasha Elena TarunadjajaNoch keine Bewertungen
- Bertram 22 SGDokument307 SeitenBertram 22 SGAzano RenardoNoch keine Bewertungen
- 43-th Math Paper 2nd FinalDokument5 Seiten43-th Math Paper 2nd FinalOjasNoch keine Bewertungen
- Signals and Systems Booklet (124 Pages)Dokument124 SeitenSignals and Systems Booklet (124 Pages)koustubha sriNoch keine Bewertungen
- 7 Marking Scheme: Worksheet: P V NRT P 1.22 × 10 PV NRT y PVDokument3 Seiten7 Marking Scheme: Worksheet: P V NRT P 1.22 × 10 PV NRT y PVН. НаранцацралтNoch keine Bewertungen
- Moody DiagramDokument18 SeitenMoody DiagramAnonymous uL3JlWfh100% (1)
- Study Material Xii (Maths) 041 2023-24Dokument85 SeitenStudy Material Xii (Maths) 041 2023-24AimbotNoch keine Bewertungen
- Be Summer 2022Dokument3 SeitenBe Summer 2022M.I.K 72Noch keine Bewertungen