Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Round Your Answer Off To 4 Decimal Places: 2 PointsDokument4 SeitenRound Your Answer Off To 4 Decimal Places: 2 PointsPam MshweshweNoch keine Bewertungen
- Godzilla VS. Kong (2021) Movie ScriptDokument5 SeitenGodzilla VS. Kong (2021) Movie ScriptlucasNoch keine Bewertungen
- BP's Proposed Findings - Combined FileDokument1.303 SeitenBP's Proposed Findings - Combined FileOSDocs2012Noch keine Bewertungen
- HESI's Proposed FOF and COLDokument335 SeitenHESI's Proposed FOF and COLOSDocs2012Noch keine Bewertungen
- To's Proposed FOF and COLDokument326 SeitenTo's Proposed FOF and COLOSDocs2012Noch keine Bewertungen
- PSC Post-Trial Brief (Phase One) (Doc 10458) 6-21-2013Dokument72 SeitenPSC Post-Trial Brief (Phase One) (Doc 10458) 6-21-2013OSDocs2012100% (1)
- BP's Post-Trial BriefDokument72 SeitenBP's Post-Trial BriefOSDocs2012Noch keine Bewertungen
- Foam Stability Testing: Request Date Slurry I.D. Result CommentsDokument1 SeiteFoam Stability Testing: Request Date Slurry I.D. Result CommentsOSDocs2012Noch keine Bewertungen
- Plaintiffs Proposed Findings and Conclusions (Phase One) (Doc 10459) 6-21-2013Dokument199 SeitenPlaintiffs Proposed Findings and Conclusions (Phase One) (Doc 10459) 6-21-2013OSDocs2012Noch keine Bewertungen
- Circa 2003Dokument1 SeiteCirca 2003OSDocs2012Noch keine Bewertungen
- Exterior: Circa 2003Dokument1 SeiteExterior: Circa 2003OSDocs2012Noch keine Bewertungen
- USAs Proposed Findings Phase I (Doc. 10460 - 6.21.2013)Dokument121 SeitenUSAs Proposed Findings Phase I (Doc. 10460 - 6.21.2013)OSDocs2012Noch keine Bewertungen
- Macondo Bod (Basis of Design)Dokument23 SeitenMacondo Bod (Basis of Design)OSDocs2012Noch keine Bewertungen
- Driller HITEC Display CCTV Camera System: Source: TREX 4248 8153Dokument1 SeiteDriller HITEC Display CCTV Camera System: Source: TREX 4248 8153OSDocs2012Noch keine Bewertungen
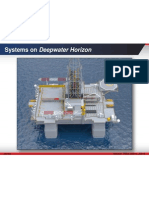
- Systems On Deepwater Horizon: Source: TREX-30014, 30015 D6753Dokument1 SeiteSystems On Deepwater Horizon: Source: TREX-30014, 30015 D6753OSDocs2012Noch keine Bewertungen
- Webster:: Trial Transcript at 3975:2-4Dokument1 SeiteWebster:: Trial Transcript at 3975:2-4OSDocs2012Noch keine Bewertungen
- DR Gene: CloggedDokument1 SeiteDR Gene: CloggedOSDocs2012Noch keine Bewertungen
- Arnaud Bobillier Email: June 17, 2010: "I See Some Similarities With What Happened On The Horizon"Dokument5 SeitenArnaud Bobillier Email: June 17, 2010: "I See Some Similarities With What Happened On The Horizon"OSDocs2012Noch keine Bewertungen
- April 20, BLOWOUT: BP Misreads Logs Does Not IdentifyDokument22 SeitenApril 20, BLOWOUT: BP Misreads Logs Does Not IdentifyOSDocs2012Noch keine Bewertungen
- Laboratory Results Cement Program Material Transfer TicketDokument13 SeitenLaboratory Results Cement Program Material Transfer TicketOSDocs2012Noch keine Bewertungen
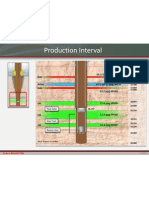
- Production Interval: 14.1-14.2 PPG M57B Gas Brine GasDokument1 SeiteProduction Interval: 14.1-14.2 PPG M57B Gas Brine GasOSDocs2012Noch keine Bewertungen
- End of Transmission: Transocean Drill Crew Turned The Pumps Off To InvestigateDokument1 SeiteEnd of Transmission: Transocean Drill Crew Turned The Pumps Off To InvestigateOSDocs2012Noch keine Bewertungen
- Webster:: Trial Transcript at 4136:17-18Dokument1 SeiteWebster:: Trial Transcript at 4136:17-18OSDocs2012Noch keine Bewertungen
- Webster:: Trial Transcript at 4015:14-16Dokument1 SeiteWebster:: Trial Transcript at 4015:14-16OSDocs2012Noch keine Bewertungen
- Thrusters: Propulsion (PROP)Dokument1 SeiteThrusters: Propulsion (PROP)OSDocs2012Noch keine Bewertungen
- Transocean 2009 Annual Report: D6732 Source: TREX-5649Dokument3 SeitenTransocean 2009 Annual Report: D6732 Source: TREX-5649OSDocs2012Noch keine Bewertungen
- Engines: Electrical Power Generation (ELPG) Emergency Shutdown System (ESD)Dokument1 SeiteEngines: Electrical Power Generation (ELPG) Emergency Shutdown System (ESD)OSDocs2012Noch keine Bewertungen
- Major DWH Maintenance Timeline: April 20, 2010 Rig in ServiceDokument7 SeitenMajor DWH Maintenance Timeline: April 20, 2010 Rig in ServiceOSDocs2012Noch keine Bewertungen
- BP September 2009 Audit: Total Items 188Dokument3 SeitenBP September 2009 Audit: Total Items 188OSDocs2012Noch keine Bewertungen
- Time Out For Safety Think Start: D6731 Source: TREX-4942Dokument1 SeiteTime Out For Safety Think Start: D6731 Source: TREX-4942OSDocs2012Noch keine Bewertungen
- BP Is The OperatorDokument1 SeiteBP Is The OperatorOSDocs2012Noch keine Bewertungen
- Lloyd's Report - Appendix C: Deepwater Horizon Summary ReportDokument1 SeiteLloyd's Report - Appendix C: Deepwater Horizon Summary ReportOSDocs2012Noch keine Bewertungen
- Raghad AlRoumi I ResumeDokument1 SeiteRaghad AlRoumi I ResumeAli AlharbiNoch keine Bewertungen
- Reflective Essay.1Dokument31 SeitenReflective Essay.1Nora Lyn M. TorresNoch keine Bewertungen
- Fake News Detection - ReportDokument59 SeitenFake News Detection - ReportSANGEETHKUMAR C100% (1)
- Chap07y atDokument192 SeitenChap07y atAulia Luqman LionarNoch keine Bewertungen
- Minh Nguyen ResumeDokument2 SeitenMinh Nguyen Resumeapi-537841053Noch keine Bewertungen
- TA400/800 FXS Gateway User Manual: Yeastar Information Technology Co. LTDDokument59 SeitenTA400/800 FXS Gateway User Manual: Yeastar Information Technology Co. LTDIliescu CristianNoch keine Bewertungen
- 10 1109@IoT-SIU 2019 8777722 PDFDokument6 Seiten10 1109@IoT-SIU 2019 8777722 PDFAkshay KumarNoch keine Bewertungen
- DU - MD 50 - EITC Receipts Web Adi V 1.0Dokument20 SeitenDU - MD 50 - EITC Receipts Web Adi V 1.0Mohamed Osama ZakiNoch keine Bewertungen
- SpringBoot All ProgramsDokument16 SeitenSpringBoot All ProgramsHitesh WadhwaniNoch keine Bewertungen
- Sandys SlidesCarnivalDokument40 SeitenSandys SlidesCarnivalEman KhanNoch keine Bewertungen
- Core 6 SuccinctlyDokument102 SeitenCore 6 Succinctlyrtfvhwzz7wNoch keine Bewertungen
- 20Dokument83 Seiten20altaminNoch keine Bewertungen
- Flatness-Based ControlDokument6 SeitenFlatness-Based ControlQuyết Nguyễn CôngNoch keine Bewertungen
- Exam - Chinese PDFDokument81 SeitenExam - Chinese PDFmlachake1978100% (1)
- Chapter 8 Enterprise Data Models PDFDokument40 SeitenChapter 8 Enterprise Data Models PDFJaliya ThilakawardaneNoch keine Bewertungen
- Extending TeamsDokument88 SeitenExtending TeamsYo Gin YunenNoch keine Bewertungen
- Iot Based Waste Collection Management System For Smart Cities: An OverviewDokument4 SeitenIot Based Waste Collection Management System For Smart Cities: An OverviewApurv ChoubeyNoch keine Bewertungen
- TCharles - Contemporary Issues Final Exam PDFDokument1 SeiteTCharles - Contemporary Issues Final Exam PDFAnonymous 4p0xl0dNoch keine Bewertungen
- AB350M Pro4Dokument72 SeitenAB350M Pro4DanReteganNoch keine Bewertungen
- Compagne Di Collegio - I Racconti Erotici Migliori11Dokument169 SeitenCompagne Di Collegio - I Racconti Erotici Migliori11kyleNoch keine Bewertungen
- Pashchimanchal Campus: Set ADokument1 SeitePashchimanchal Campus: Set AAnonymous uTC8baNoch keine Bewertungen
- SAP-IT Internal Migration From XI3 To BI4 SCNDokument9 SeitenSAP-IT Internal Migration From XI3 To BI4 SCNa567786Noch keine Bewertungen
- How To Add Fonts To Xdo FileDokument5 SeitenHow To Add Fonts To Xdo Fileseethal_2Noch keine Bewertungen
- Green University of Bangladesh Department of Computer Science and Engineering (CSE)Dokument8 SeitenGreen University of Bangladesh Department of Computer Science and Engineering (CSE)Rakibul KarimNoch keine Bewertungen
- ISO26262 and IEC61508Dokument12 SeitenISO26262 and IEC61508최재호100% (1)
- PreviewpdfDokument23 SeitenPreviewpdfstudio lineNoch keine Bewertungen
- Activity 1Dokument4 SeitenActivity 1Benedict SungaNoch keine Bewertungen
- Obia Release NotesDokument40 SeitenObia Release Notesprakash9565Noch keine Bewertungen