Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Portable hardness tester - Thiết bị đo độ cứng cầm tay- Liên hệ: 0989653832Dokument15 SeitenPortable hardness tester - Thiết bị đo độ cứng cầm tay- Liên hệ: 0989653832Đặng Đình TuấnNoch keine Bewertungen
- Computer Repair Business PlanDokument31 SeitenComputer Repair Business PlanBerihun Engda100% (1)
- GX Works2 Version 1 Operating Manual (Simple Project, Function Block)Dokument112 SeitenGX Works2 Version 1 Operating Manual (Simple Project, Function Block)Nhut Nguyen KeNoch keine Bewertungen
- ReWaRD User ManualDokument112 SeitenReWaRD User Manualfrog15Noch keine Bewertungen
- S7 400HDokument504 SeitenS7 400HSaverioCorNoch keine Bewertungen
- Manual 831Dokument102 SeitenManual 831Salvador LuisNoch keine Bewertungen
- FP-001 Programmer OverviewDokument4 SeitenFP-001 Programmer OverviewFlavio G MiguelNoch keine Bewertungen
- DUAL VIEW AND SINGLE VIEW 320kV Installation and Maintenance Manual 5 PDFDokument260 SeitenDUAL VIEW AND SINGLE VIEW 320kV Installation and Maintenance Manual 5 PDFRamilson43% (7)
- Leica FlexField v2.50 Software Release NotesDokument5 SeitenLeica FlexField v2.50 Software Release NotesMauricio RuizNoch keine Bewertungen
- HydroBat Product DescriptionDokument12 SeitenHydroBat Product DescriptionNur HabibNoch keine Bewertungen
- Simplified Datasheet For EX900 M.2 EN PDFDokument2 SeitenSimplified Datasheet For EX900 M.2 EN PDFWyler Gamarra LeonNoch keine Bewertungen
- Twenty Years of Measuring The Missing Link (Maitland+20)Dokument9 SeitenTwenty Years of Measuring The Missing Link (Maitland+20)ICTdocsNoch keine Bewertungen
- Business Startup Proposal for Sales RepresentativeDokument4 SeitenBusiness Startup Proposal for Sales RepresentativeBranson Kaution Peters II100% (9)
- Hardware NetworkingDokument2 SeitenHardware Networkingbca onlineclassNoch keine Bewertungen
- CX-Server Runtime 17 Manual PDFDokument109 SeitenCX-Server Runtime 17 Manual PDFSergio Eu CaNoch keine Bewertungen
- Results of A Case Study On Information Technology at A UniversityDokument24 SeitenResults of A Case Study On Information Technology at A UniversitypushmbaNoch keine Bewertungen
- Vodafone Station Complete User ManualDokument18 SeitenVodafone Station Complete User ManualFergus GardnerNoch keine Bewertungen
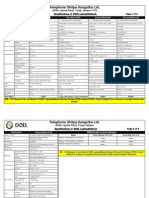
- Telephone Shilpa Sangstha LTD.: (DOEL Laptop Plant), Tongi, Gazipur-1710Dokument2 SeitenTelephone Shilpa Sangstha LTD.: (DOEL Laptop Plant), Tongi, Gazipur-1710krhaque2004Noch keine Bewertungen
- Thermal Take DH101 ManualDokument25 SeitenThermal Take DH101 Manualgrom381Noch keine Bewertungen
- Philips UpdateDokument3 SeitenPhilips UpdatesorintvrNoch keine Bewertungen
- G5vD E-Manual IDokument10 SeitenG5vD E-Manual Ijwvh25Noch keine Bewertungen
- Business Analysis HPDokument9 SeitenBusiness Analysis HPRizki Saputro0% (1)
- Software TiSwitchBoardDevice PDFDokument50 SeitenSoftware TiSwitchBoardDevice PDFAnthony VelezNoch keine Bewertungen
- Airnavx IT Prerequisites For Standalone v1Dokument7 SeitenAirnavx IT Prerequisites For Standalone v1Khalid DaghariNoch keine Bewertungen
- Lead Acid Battery Management System For Electrical VehiclesDokument11 SeitenLead Acid Battery Management System For Electrical VehiclesIAEME PublicationNoch keine Bewertungen
- PC Build NEW!! PDFDokument1 SeitePC Build NEW!! PDFAnonymous 1AEufxhKrNoch keine Bewertungen
- EB8000 Manual All in One PDFDokument702 SeitenEB8000 Manual All in One PDFgarm0704Noch keine Bewertungen
- Users Manual 154390 PDFDokument68 SeitenUsers Manual 154390 PDFhectorNoch keine Bewertungen
- Linux DownloadDokument6 SeitenLinux DownloadsaurabhNoch keine Bewertungen
- SDHmini-Ex: Intrinsically Safe Portable Dewpoint HygrometerDokument4 SeitenSDHmini-Ex: Intrinsically Safe Portable Dewpoint Hygrometerabdurahman143Noch keine Bewertungen