Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
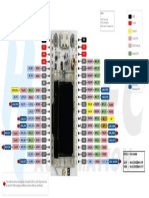
- Wifi Lora 32 (V2) Pinout Diagram: GND PowerDokument1 SeiteWifi Lora 32 (V2) Pinout Diagram: GND PowerCristhian FradeNoch keine Bewertungen
- Performing Mensuration and Calculations QuizDokument2 SeitenPerforming Mensuration and Calculations QuizArt Dollosa100% (4)
- Dod STD 2167Dokument95 SeitenDod STD 2167Hercules WuNoch keine Bewertungen
- Disk Copy 6Dokument28 SeitenDisk Copy 6scriNoch keine Bewertungen
- Elnec SmartProg2 ManualDokument171 SeitenElnec SmartProg2 ManualTamizhNoch keine Bewertungen
- Xeno ManualDokument122 SeitenXeno Manualzbhp z100% (1)
- Brocade M6505 16 Gbps : Fibre Channel San I/O Module Quickstart GuideDokument10 SeitenBrocade M6505 16 Gbps : Fibre Channel San I/O Module Quickstart GuidesreenivasanNoch keine Bewertungen
- Contactless Digital Tachometer Using Microcontroll-1 PDFDokument7 SeitenContactless Digital Tachometer Using Microcontroll-1 PDFparamasivan Raju KNoch keine Bewertungen
- Pinnacle DV500 User GuideDokument188 SeitenPinnacle DV500 User GuideDarko BelevNoch keine Bewertungen
- Guide Installation DFW ReseauDokument23 SeitenGuide Installation DFW Reseaulabakoum badr-eddineNoch keine Bewertungen
- E-Manual: First Edition October 2015Dokument108 SeitenE-Manual: First Edition October 2015Mario VegaNoch keine Bewertungen
- An Introduction To VirtualizationDokument27 SeitenAn Introduction To VirtualizationBerrezeg MahieddineNoch keine Bewertungen
- Introduction To Cmos Vlsi Design: Sequential CircuitsDokument54 SeitenIntroduction To Cmos Vlsi Design: Sequential Circuitsamitmodak89Noch keine Bewertungen
- EMC Control CenterDokument3 SeitenEMC Control CenterMadhavendra WankhadeNoch keine Bewertungen
- Rainbow TechnologyDokument18 SeitenRainbow Technologysaec08450100% (1)
- List of Laptop Brands and Manufacturers - WikipediaDokument18 SeitenList of Laptop Brands and Manufacturers - WikipediaNUTHI SIVA SANTHANNoch keine Bewertungen
- IS2083 - DatasheetDokument65 SeitenIS2083 - DatasheetStefanoViganóNoch keine Bewertungen
- EFSDokument4 SeitenEFSRobson RogérioNoch keine Bewertungen
- Informatics BookDokument142 SeitenInformatics BookSHILPA SURESHNoch keine Bewertungen
- IBM DS8000 Performance Monitoring and TuningDokument600 SeitenIBM DS8000 Performance Monitoring and TuningVăn Tạ TrungNoch keine Bewertungen
- A1 1a Extreme 5320 S Core Switch v4Dokument99 SeitenA1 1a Extreme 5320 S Core Switch v4nofiardiman saputraNoch keine Bewertungen
- M.drive - dms08bf - Rev.05.eng - Final (Drive Barufaldi)Dokument23 SeitenM.drive - dms08bf - Rev.05.eng - Final (Drive Barufaldi)Claudio Almici100% (2)
- Logo History: Harman International IndustriesDokument2 SeitenLogo History: Harman International IndustriesrobertoNoch keine Bewertungen
- BACnet Development Board-User-Manual PDFDokument24 SeitenBACnet Development Board-User-Manual PDFThếSơnNguyễnNoch keine Bewertungen
- 250/150/100/60Mhz Digital Storage Oscilloscope: GDS-820S GDS-806S GDS-820C GDS-806C GDS-840S GDS-810S GDS-840C GDS-810CDokument4 Seiten250/150/100/60Mhz Digital Storage Oscilloscope: GDS-820S GDS-806S GDS-820C GDS-806C GDS-840S GDS-810S GDS-840C GDS-810CSummer RamirezNoch keine Bewertungen
- ISA and PC104 Bus DescriptionDokument20 SeitenISA and PC104 Bus DescriptionUsamaNoch keine Bewertungen
- XTS-DVR72 XX-V Versatile Series: Downloaded From Manuals Search EngineDokument137 SeitenXTS-DVR72 XX-V Versatile Series: Downloaded From Manuals Search EnginermsercomNoch keine Bewertungen
- H Series ASIO Driver Installation Guide (Windows)Dokument11 SeitenH Series ASIO Driver Installation Guide (Windows)CamanhoNoch keine Bewertungen
- Free BTC 2Dokument1 SeiteFree BTC 2k0lanNoch keine Bewertungen
- Acer x1228 BrochureDokument4 SeitenAcer x1228 Brochurelord.cheteckNoch keine Bewertungen