Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Functional and Structural Tensor Analysis For EngineersDokument323 SeitenFunctional and Structural Tensor Analysis For EngineersManuel F. Presnilla100% (16)
- Chapter 2-Force SystemDokument52 SeitenChapter 2-Force SystemGrace GuyNoch keine Bewertungen
- MATH G9 - Q3 - M5 (24pages)Dokument24 SeitenMATH G9 - Q3 - M5 (24pages)Shekinah Dela CruzNoch keine Bewertungen
- Vector AlgebraDokument39 SeitenVector AlgebraKuntal Satpathi100% (1)
- Review of Vector AlgebraDokument39 SeitenReview of Vector AlgebraDivyansh RathiNoch keine Bewertungen
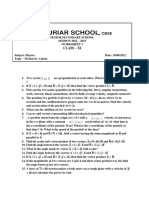
- Motion in A Plane Worksheet1Dokument2 SeitenMotion in A Plane Worksheet1Shreyash Meher [9A][41]Noch keine Bewertungen
- General Physics 1: Phys100Dokument20 SeitenGeneral Physics 1: Phys100Ahven EmbestroNoch keine Bewertungen
- MomentDokument34 SeitenMomentMohd Azhari Mohd RodziNoch keine Bewertungen
- Walter Lewin Notes 3Dokument6 SeitenWalter Lewin Notes 3Romesor ApolNoch keine Bewertungen
- G11 Physics Extreme Series BookDokument435 SeitenG11 Physics Extreme Series BookHabtamu Worku100% (2)
- Classical Electromagnetism - FitzpatrickDokument227 SeitenClassical Electromagnetism - FitzpatrickTarwin WinNoch keine Bewertungen
- Levi CivitaDokument4 SeitenLevi CivitaLana IlseNoch keine Bewertungen
- Calculus 3 Lecture Notes 1 PDFDokument240 SeitenCalculus 3 Lecture Notes 1 PDFJamena AbbasNoch keine Bewertungen
- Vectors and Matrices FinalDokument64 SeitenVectors and Matrices FinalPG ChongNoch keine Bewertungen
- MCQs Chap 2Dokument3 SeitenMCQs Chap 2Sharjeel PervaizNoch keine Bewertungen
- Model Paper-4Dokument122 SeitenModel Paper-4S Kalu SivalingamNoch keine Bewertungen
- Lecture Math With VectorsDokument8 SeitenLecture Math With VectorsBill WhiteNoch keine Bewertungen
- Solution Chap 1 - Introduction To Electrodynamics, 4th EdDokument22 SeitenSolution Chap 1 - Introduction To Electrodynamics, 4th EdAhmad HassanNoch keine Bewertungen
- جميع سلايدات الاستاتيكاDokument129 Seitenجميع سلايدات الاستاتيكاDanaabdurNoch keine Bewertungen
- Ruin A Pratap ProblemsDokument118 SeitenRuin A Pratap Problemstea777_ro4774Noch keine Bewertungen
- Problems Theory and Solutions in Linear AlgebraDokument169 SeitenProblems Theory and Solutions in Linear AlgebraCủa Tôi Thần TuợngNoch keine Bewertungen
- BSCPH 101 PDFDokument328 SeitenBSCPH 101 PDFPankaj RajNoch keine Bewertungen
- 3RD Term S2 Further MathematicsDokument35 Seiten3RD Term S2 Further MathematicsFaith OzuahNoch keine Bewertungen
- Markus Zahn SolucionaryDokument381 SeitenMarkus Zahn SolucionaryVillarroel Claros MichaelNoch keine Bewertungen
- Hayt8e SM Ch1Dokument11 SeitenHayt8e SM Ch1Kevin KanzelmeyerNoch keine Bewertungen
- Summary of Coordinate Systems: Cartesian, Cylindrical, SphericalDokument25 SeitenSummary of Coordinate Systems: Cartesian, Cylindrical, SphericalMalekNoch keine Bewertungen
- Mechanics BindDokument375 SeitenMechanics BindFrancisco BezerraNoch keine Bewertungen
- VectoranalysisDokument466 SeitenVectoranalysisrjd150Noch keine Bewertungen
- AMA2112: Mathematics II Chapter 6. Vector Calculus: Dr. ZHANG Guofeng Guofeng - Zhang@polyu - Edu.hkDokument40 SeitenAMA2112: Mathematics II Chapter 6. Vector Calculus: Dr. ZHANG Guofeng Guofeng - Zhang@polyu - Edu.hkHollowq RixkNoch keine Bewertungen