Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- IEEE Conf 2018 TrackNet - A - Deep - Learning - Based - Fault - Detection - For - Railway - Track - InspectionDokument5 SeitenIEEE Conf 2018 TrackNet - A - Deep - Learning - Based - Fault - Detection - For - Railway - Track - InspectionkaruldeepaNoch keine Bewertungen
- A Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONDokument14 SeitenA Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONalfonsoNoch keine Bewertungen
- Tquins Resources Training Template For MT Work Programme SCS RevisedDokument12 SeitenTquins Resources Training Template For MT Work Programme SCS RevisedLileth LagasimNoch keine Bewertungen
- Usermanual en Manual Arium Bagtanks WH26010 ADokument33 SeitenUsermanual en Manual Arium Bagtanks WH26010 AԳոռ ԽաչատրյանNoch keine Bewertungen
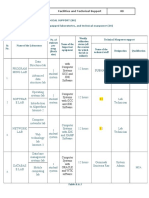
- Criterion 6 Facilities and Technical Support 80: With Computer Systems GCC and JDK SoftwareDokument6 SeitenCriterion 6 Facilities and Technical Support 80: With Computer Systems GCC and JDK SoftwareVinaya Babu MNoch keine Bewertungen
- Cycle CountDokument58 SeitenCycle CountPJ190275% (4)
- Method Statement For PaintDokument5 SeitenMethod Statement For Paintxxx100% (2)
- Jaipur Foot 2014 India Business ConferenceDokument22 SeitenJaipur Foot 2014 India Business Conferencepratt100% (1)
- Piping SpecificationDokument3 SeitenPiping SpecificationShashi RanjanNoch keine Bewertungen
- Surdial Service Manual PDFDokument130 SeitenSurdial Service Manual PDFHelpmedica IDI100% (1)
- 20140630-A2384 ALTRONIXDokument30 Seiten20140630-A2384 ALTRONIXRicardo MercadoNoch keine Bewertungen
- Pooja CVDokument3 SeitenPooja CVEl Cajon de AmeliaNoch keine Bewertungen
- ABB Surge Arrester MWK - Data Sheet 1HC0075865 E01 ABDokument5 SeitenABB Surge Arrester MWK - Data Sheet 1HC0075865 E01 ABsriniNoch keine Bewertungen
- Operating Check List For Disel Generator: Date: TimeDokument2 SeitenOperating Check List For Disel Generator: Date: TimeAshfaq BilwarNoch keine Bewertungen
- Wind LoadDokument1 SeiteWind Loadvikramjain66Noch keine Bewertungen
- Building A Custom Rifle StockDokument38 SeitenBuilding A Custom Rifle Stock24HR Airgunner Channel100% (1)
- Alternator LSA42.3j enDokument12 SeitenAlternator LSA42.3j enArdi Wiranata PermadiNoch keine Bewertungen
- SYS600 System ConfigurationDokument256 SeitenSYS600 System ConfigurationDang JinlongNoch keine Bewertungen
- LabVIEW Project Report Complete HPK Kumar DetailedDokument62 SeitenLabVIEW Project Report Complete HPK Kumar DetailedDanny Vu75% (4)
- Xample Program in C++ Using File Handling To Perform Following OperationsDokument6 SeitenXample Program in C++ Using File Handling To Perform Following OperationsNamita SahuNoch keine Bewertungen
- Yamaha Model Index 1958 2010 PDFDokument442 SeitenYamaha Model Index 1958 2010 PDFSanja Krajinovic100% (2)
- Naruto - NagareboshiDokument2 SeitenNaruto - NagareboshiOle HansenNoch keine Bewertungen
- Oracle - Fusion - Middleware - 11g ADF I Volume IDokument374 SeitenOracle - Fusion - Middleware - 11g ADF I Volume IMaged AliNoch keine Bewertungen
- HCF Spec 190 1.0 PDFDokument31 SeitenHCF Spec 190 1.0 PDFvikulovNoch keine Bewertungen
- Distributed Exam 2017Dokument3 SeitenDistributed Exam 2017Israel Oteka0% (1)
- Coil PDFDokument2 SeitenCoil PDFhandbookNoch keine Bewertungen
- PCBA-WP543HV HW Manual Rev1.05Dokument21 SeitenPCBA-WP543HV HW Manual Rev1.05Surapong Pongchaiprateep100% (1)
- Unit 2Dokument3 SeitenUnit 2lewlking123Noch keine Bewertungen
- PSS Report206Dokument90 SeitenPSS Report206Abhishek TiwariNoch keine Bewertungen