Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- NullDokument20 SeitenNullrc_casas99Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Identifying Counterfeit Square D Circuit Breakers: P I C BDokument2 SeitenIdentifying Counterfeit Square D Circuit Breakers: P I C Brc_casas99Noch keine Bewertungen
- Capacitor Bank-Protection and ControlDokument3 SeitenCapacitor Bank-Protection and Controlrc_casas99Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
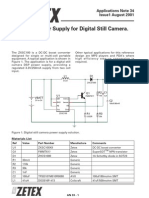
- ZXSC100 Power Supply For Digital Still Camera.: Applications Note 34 Issue1 August 2001Dokument5 SeitenZXSC100 Power Supply For Digital Still Camera.: Applications Note 34 Issue1 August 2001rc_casas99Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- NullDokument31 SeitenNullrc_casas99100% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Product Locator Index - Alphanumeric Numerics: ClipsalDokument22 SeitenProduct Locator Index - Alphanumeric Numerics: Clipsalrc_casas99Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Trans Calc HelpDokument13 SeitenTrans Calc HelpSajeeth AliNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Preliminary Preliminary: Safety SolutionsDokument7 SeitenPreliminary Preliminary: Safety Solutionsrc_casas99Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Z80 User ManualDokument308 SeitenZ80 User ManualLaFlibusteNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Cat5e Cable Wiring SchemesDokument3 SeitenCat5e Cable Wiring Schemesrc_casas99Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Cat5e WiringDokument2 SeitenCat5e Wiringrc_casas99Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Water Seepage AlarmDokument1 SeiteWater Seepage Alarmrc_casas99Noch keine Bewertungen
- Elite 707 Patching & Equipment Frame: Standard Build Optional ExtrasDokument1 SeiteElite 707 Patching & Equipment Frame: Standard Build Optional Extrasrc_casas99Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- NullDokument5 SeitenNullrc_casas99Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 250W High Power Factor Supply For TV: Application NoteDokument6 Seiten250W High Power Factor Supply For TV: Application Noterc_casas99Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Assembly Manual: In-Circuit LOPT/FBT Tester K 7205Dokument6 SeitenAssembly Manual: In-Circuit LOPT/FBT Tester K 7205majanaam100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Appliance Tester/Power Analyzer: Compact, Battery Operated Device For Analyzing AC Power LoadsDokument1 SeiteAppliance Tester/Power Analyzer: Compact, Battery Operated Device For Analyzing AC Power Loadsrc_casas99Noch keine Bewertungen
- Power Power Factor Controller RVTDokument8 SeitenPower Power Factor Controller RVTrc_casas99Noch keine Bewertungen
- Remote Monitoring System For Transformer SubstationDokument3 SeitenRemote Monitoring System For Transformer SubstationscribdkkkNoch keine Bewertungen
- Installation/Operation Manual: Model Voice-Activated INTERCOMDokument2 SeitenInstallation/Operation Manual: Model Voice-Activated INTERCOMrc_casas99Noch keine Bewertungen
- FSK Power Line Transceiver: General FeaturesDokument44 SeitenFSK Power Line Transceiver: General Featuresrc_casas99Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Powerline ComDokument107 SeitenPowerline ComTyreek D-Angel YamiNoch keine Bewertungen
- NullDokument11 SeitenNullrc_casas99Noch keine Bewertungen
- Coil Oscillator Trigger Circuit Output Circuit Motion Direction Proximity Switch TargetDokument14 SeitenCoil Oscillator Trigger Circuit Output Circuit Motion Direction Proximity Switch Targetrc_casas99Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- NullDokument28 SeitenNullrc_casas99Noch keine Bewertungen
- Basic Instrumentation Measuring Devices and Basic Pid ControlDokument125 SeitenBasic Instrumentation Measuring Devices and Basic Pid ControlCuong Nguyen ChiNoch keine Bewertungen
- Introduction To Programmable Logic Controllers in A Mechanical Engineering Instrumentation CourseDokument8 SeitenIntroduction To Programmable Logic Controllers in A Mechanical Engineering Instrumentation Courserc_casas99Noch keine Bewertungen
- NullDokument2 SeitenNullrc_casas99Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- USX8-6W Product SpecificationsDokument6 SeitenUSX8-6W Product Specificationswarley izquierdo macanaNoch keine Bewertungen
- FMDokument52 SeitenFMZafar KhanNoch keine Bewertungen
- 01-Basics of AntennasDokument40 Seiten01-Basics of Antennaskomar33Noch keine Bewertungen
- 1.5W 1-2 KM Range FM Transmitter by 2N2219 - Circuit ProjectDokument4 Seiten1.5W 1-2 KM Range FM Transmitter by 2N2219 - Circuit ProjectManpreet SinghNoch keine Bewertungen
- V AntennaDokument5 SeitenV Antennaማሙየ አይቸውNoch keine Bewertungen
- Odp 065R17DB PDFDokument1 SeiteOdp 065R17DB PDFfaapctba2913Noch keine Bewertungen
- Planning and Optimization Guideline For Multi Sector Project (Standard Operation Procedure)Dokument22 SeitenPlanning and Optimization Guideline For Multi Sector Project (Standard Operation Procedure)triastana100% (1)
- NR-SPREAD SPECTRUM COMMUNICATIONSfr-8703 PDFDokument1 SeiteNR-SPREAD SPECTRUM COMMUNICATIONSfr-8703 PDFNaresh KumarNoch keine Bewertungen
- EE3012 Communication Principles - OBTLDokument5 SeitenEE3012 Communication Principles - OBTLAaron Tan0% (1)
- Mikko Valtonen - Omnitele NewDokument20 SeitenMikko Valtonen - Omnitele NewNurles TurdumanbetovNoch keine Bewertungen
- PrinCom Chapter 3Dokument7 SeitenPrinCom Chapter 3BenjhonElarcosaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Floc'h Et Al-2006-Microwave and Optical Technology LettersDokument7 SeitenFloc'h Et Al-2006-Microwave and Optical Technology LettersFabiano SilveiraNoch keine Bewertungen
- Passive Parts BR 101366 enDokument20 SeitenPassive Parts BR 101366 enIbrahim UsmanNoch keine Bewertungen
- A Flexible Corrugated Vivaldi Antenna For Radar and See-Through Wall ApplicationsDokument1 SeiteA Flexible Corrugated Vivaldi Antenna For Radar and See-Through Wall ApplicationsPratul NijhawanNoch keine Bewertungen
- Analog CommunicationDokument46 SeitenAnalog Communicationsrirocking9Noch keine Bewertungen
- MBF-40 Series: Single, Dual, Tri and Quad Band For BrazilDokument3 SeitenMBF-40 Series: Single, Dual, Tri and Quad Band For BrazilClaudia MendesNoch keine Bewertungen
- Overview: 1.1 FeaturesDokument104 SeitenOverview: 1.1 FeaturesAhamed Shiraz ARNoch keine Bewertungen
- Data Sheet Mseb4Dokument2 SeitenData Sheet Mseb4Marciel AmorimNoch keine Bewertungen
- DME and TACANDokument8 SeitenDME and TACANMalou Ruiz DenolanNoch keine Bewertungen
- MW - ANTENA - 2.4m W6G Dual Polarization AntennaDokument3 SeitenMW - ANTENA - 2.4m W6G Dual Polarization AntennaAlfonso Rodrigo Garcés GarcésNoch keine Bewertungen
- Antenna Theory TutorialDokument24 SeitenAntenna Theory TutorialHashem AllahamNoch keine Bewertungen
- HFV 8040Dokument3 SeitenHFV 8040deyede2003Noch keine Bewertungen
- FT Commscope Egzv5-65d-R6Dokument5 SeitenFT Commscope Egzv5-65d-R6Alex CosmaNoch keine Bewertungen
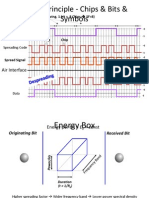
- CDMA Principle - Chips & Bits & SymbolsDokument10 SeitenCDMA Principle - Chips & Bits & SymbolsGregory CapellaNoch keine Bewertungen
- Bordeless Mobility in 5G Outdoor Ultra Dense NetworkDokument15 SeitenBordeless Mobility in 5G Outdoor Ultra Dense Networkreynaldo12Noch keine Bewertungen
- GSM Optimization Guide Book-Han Bin JieDokument43 SeitenGSM Optimization Guide Book-Han Bin JieOmer Waqar100% (1)
- Wideband Log-Periodic AntennaDokument2 SeitenWideband Log-Periodic AntennaDaniel Manole100% (1)
- RF - ZE554KL Trouble Shooting Guide - DiscreteDokument41 SeitenRF - ZE554KL Trouble Shooting Guide - DiscreteVinicius TeixeiraNoch keine Bewertungen
- EE 499, Lecture 03 Frequency ReuseDokument6 SeitenEE 499, Lecture 03 Frequency ReuselakshmiNoch keine Bewertungen
- Interference PDFDokument4 SeitenInterference PDFmoeen.tariq9252100% (1)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (57)
- Hero Found: The Greatest POW Escape of the Vietnam WarVon EverandHero Found: The Greatest POW Escape of the Vietnam WarBewertung: 4 von 5 Sternen4/5 (19)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (242)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)