Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Radio Frequency SystemDokument8 SeitenRadio Frequency SystemMAnohar KumarNoch keine Bewertungen
- Transmission and Distribution For Electrical Engineering - Electricalnotes4uDokument10 SeitenTransmission and Distribution For Electrical Engineering - Electricalnotes4uNitin Maurya100% (1)
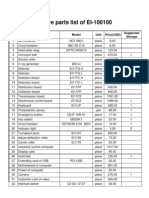
- Ei 100100Dokument2 SeitenEi 100100Tabassum BanuNoch keine Bewertungen
- Operation ManualDokument9 SeitenOperation Manualapi-202718495Noch keine Bewertungen
- Experiment-3 30KV Insulation TesterDokument4 SeitenExperiment-3 30KV Insulation TesterAbhinav SinhaNoch keine Bewertungen
- Ts A300dDokument42 SeitenTs A300dEvgeniy KotNoch keine Bewertungen
- LTC 4041Dokument26 SeitenLTC 4041mar_barudjNoch keine Bewertungen
- Leds201902 DL PDFDokument52 SeitenLeds201902 DL PDFoana_asafteiNoch keine Bewertungen
- Bab 1 (Material Science)Dokument9 SeitenBab 1 (Material Science)Muhd AriffNoch keine Bewertungen
- Pneumatic BikeDokument20 SeitenPneumatic BikeAjithspykeNoch keine Bewertungen
- Teco Ma7200 2 PDFDokument209 SeitenTeco Ma7200 2 PDFDung LeNoch keine Bewertungen
- 1000 KVA DG Generator ParametersDokument14 Seiten1000 KVA DG Generator ParametersdinukaeeNoch keine Bewertungen
- Automatic Distance Measurement& Braking-UltrasonicDokument24 SeitenAutomatic Distance Measurement& Braking-Ultrasonicjyothisaravind100% (8)
- APC Smart-UPS SC BrochureDokument16 SeitenAPC Smart-UPS SC BrochurePTR77Noch keine Bewertungen
- Service Notes: Issued by RJADokument25 SeitenService Notes: Issued by RJAshekinah oficialNoch keine Bewertungen
- WSDA-USB Datasheet (8400-0074)Dokument2 SeitenWSDA-USB Datasheet (8400-0074)paulkohanNoch keine Bewertungen
- S202P-C40 Miniature Circuit Breaker - 2P - C - 40 A: Product-DetailsDokument6 SeitenS202P-C40 Miniature Circuit Breaker - 2P - C - 40 A: Product-DetailsBilalNoch keine Bewertungen
- Alfie Mini Spot ManualDokument10 SeitenAlfie Mini Spot ManualDaniel MalagoliNoch keine Bewertungen
- Tda 2611aqDokument13 SeitenTda 2611aqban4444Noch keine Bewertungen
- NS3000 Modem BD 2Dokument2 SeitenNS3000 Modem BD 2Andy ChanNoch keine Bewertungen
- What Is A Phase SequenceDokument5 SeitenWhat Is A Phase SequencedanielNoch keine Bewertungen
- Practical 8: Foundation of Engineering School of Engineering Taylor's University MalaysiaDokument7 SeitenPractical 8: Foundation of Engineering School of Engineering Taylor's University Malaysiapokemon khaiNoch keine Bewertungen
- Mba RenacDokument1 SeiteMba RenacRati GabisoniaNoch keine Bewertungen
- Moscap5mar 2020Dokument2 SeitenMoscap5mar 2020Omkar KatkarNoch keine Bewertungen
- 1339fas-1271399 lt1339cswDokument21 Seiten1339fas-1271399 lt1339cswMuhammad ShamrezNoch keine Bewertungen
- Indesit Idce745euDokument13 SeitenIndesit Idce745euMилош ЛукићNoch keine Bewertungen
- Continental Directional-Proportional Valves PDFDokument98 SeitenContinental Directional-Proportional Valves PDFhebert perezNoch keine Bewertungen
- Eee-Vi-Switchgear & Protection (10ee62) - Notes PDFDokument92 SeitenEee-Vi-Switchgear & Protection (10ee62) - Notes PDFRK KNoch keine Bewertungen
- 6204 Parts Lists PDFDokument51 Seiten6204 Parts Lists PDFMirzaNoch keine Bewertungen
- QAP22-Sensor de TemperaturaDokument4 SeitenQAP22-Sensor de TemperaturaLH JhonathanNoch keine Bewertungen