Das könnte Ihnen auch gefallen
- 7.magnetic Effect of Electric Current - Doc (VII)Dokument25 Seiten7.magnetic Effect of Electric Current - Doc (VII)Haerfing AuwNoch keine Bewertungen
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Von EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (5)
- Second Year Physics ObjectiveDokument51 SeitenSecond Year Physics ObjectiveUsman Mustafvi100% (5)
- Johndro ArticlesDokument22 SeitenJohndro Articlesthebay5Noch keine Bewertungen
- MFL PPT NotesDokument3 SeitenMFL PPT NotesGaurav ChopraNoch keine Bewertungen
- High Voltage Xlpe Cable Systems Technical User Guide For 127 - 500 KVDokument12 SeitenHigh Voltage Xlpe Cable Systems Technical User Guide For 127 - 500 KVmani_208eeNoch keine Bewertungen
- ABB Pocket Book 11th Edition Chapter 16Dokument24 SeitenABB Pocket Book 11th Edition Chapter 16macNoch keine Bewertungen
- Earthing Calculation PDFDokument10 SeitenEarthing Calculation PDFTimothy Green75% (4)
- Power Cables and Wires Technical Manual 2010 EditionDokument183 SeitenPower Cables and Wires Technical Manual 2010 EditionRamiro Magbanua FelicianoNoch keine Bewertungen
- Electronic PackagingDokument32 SeitenElectronic PackaginglkeathongNoch keine Bewertungen
- Introduction To CSAMTDokument7 SeitenIntroduction To CSAMTNurlia AduNoch keine Bewertungen
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterVon EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNoch keine Bewertungen
- Lib Thermal HydraulicDokument59 SeitenLib Thermal HydraulicboroumandNoch keine Bewertungen
- System Level Simulation of Acoustic DevicesDokument8 SeitenSystem Level Simulation of Acoustic DevicesErdet NasufiNoch keine Bewertungen
- Wait 1954 GeophysicsDokument9 SeitenWait 1954 GeophysicsEvanz LazaroNoch keine Bewertungen
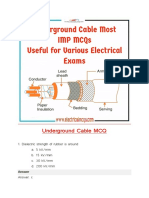
- Underground Cable MCQDokument42 SeitenUnderground Cable MCQshukla dhavalNoch keine Bewertungen
- Time Domain Electromagnetic MethodsDokument16 SeitenTime Domain Electromagnetic MethodsAydin Nejati100% (1)
- Time-Domain Electromagnetic: 9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is ADokument12 SeitenTime-Domain Electromagnetic: 9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is ARoland Rawlins IgaborNoch keine Bewertungen
- Electromagnetic MethodsDokument22 SeitenElectromagnetic MethodsJavedkhanaNoch keine Bewertungen
- Unsworth Basic MT, Skin Depth, TE, TMDokument8 SeitenUnsworth Basic MT, Skin Depth, TE, TMFernando OktavianNoch keine Bewertungen
- Microwave Communications and Radar: Target Scattering Cross-SectionDokument6 SeitenMicrowave Communications and Radar: Target Scattering Cross-SectionOmotowa DapoNoch keine Bewertungen
- The Gentleman'S Guide To Frequency Selective SurfacesDokument18 SeitenThe Gentleman'S Guide To Frequency Selective Surfacesamitgh88100% (1)
- Magnetotelluric Method: A Tool For Deep Crustal Study: Pritam Bera, Dr. C. K. Rao, IIGDokument7 SeitenMagnetotelluric Method: A Tool For Deep Crustal Study: Pritam Bera, Dr. C. K. Rao, IIGGian Angga PratamaNoch keine Bewertungen
- 9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is A GeophysicalDokument7 Seiten9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is A GeophysicalRoland Rawlins IgaborNoch keine Bewertungen
- Plasmon SpectrumDokument7 SeitenPlasmon SpectrumTayyab NoumanNoch keine Bewertungen
- Cavity Writeup ExpDokument7 SeitenCavity Writeup ExpKr PrajapatNoch keine Bewertungen
- Electromagnetic TechniquesDokument15 SeitenElectromagnetic TechniquesYaparla DeepthiNoch keine Bewertungen
- Magnetotellurics-Field Techniques - Week 7Dokument7 SeitenMagnetotellurics-Field Techniques - Week 7shabila gadisNoch keine Bewertungen
- Predict Resonances of Shielded PCBsDokument8 SeitenPredict Resonances of Shielded PCBskhanafzaal2576Noch keine Bewertungen
- TDEM For Martian in Situ Resource Prospecting MissionsDokument11 SeitenTDEM For Martian in Situ Resource Prospecting MissionsAyoub KhémiriNoch keine Bewertungen
- VACUUM SPPsDokument4 SeitenVACUUM SPPswade.naylorNoch keine Bewertungen
- Airborne Electromagnetic SurveysDokument21 SeitenAirborne Electromagnetic SurveysAdhitya RahadhiNoch keine Bewertungen
- Segment 016 of Geophysics - Capabilities - Rev06-Without LogoDokument2 SeitenSegment 016 of Geophysics - Capabilities - Rev06-Without LogoDesai NileshNoch keine Bewertungen
- Electromagnetic MethodDokument29 SeitenElectromagnetic Method'ara' 'fara'Noch keine Bewertungen
- 9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is ADokument2 Seiten9.0 Transient Electromagnetics, (Also Time-Domain Electromagnetics / TDEM), Is ARoland Rawlins IgaborNoch keine Bewertungen
- Trans Line GND Cond NelsonDokument4 SeitenTrans Line GND Cond NelsonVishwanath HegdeNoch keine Bewertungen
- b03 SendDynamical Susceptibility Close To A Critical Point in Sr3Ru2O7aiDokument2 Seitenb03 SendDynamical Susceptibility Close To A Critical Point in Sr3Ru2O7aiS GrixNoch keine Bewertungen
- High-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissDokument34 SeitenHigh-Field Laser Physics: ETH Zürich Spring Semester 2010 H. R. ReissjasmonNoch keine Bewertungen
- Source Inversion of The 1988 Upland, CaliforniaDokument12 SeitenSource Inversion of The 1988 Upland, CaliforniabuitrungthongNoch keine Bewertungen
- Chapter 3. The Lorentz System - Paul TobinDokument55 SeitenChapter 3. The Lorentz System - Paul TobinN DNoch keine Bewertungen
- Yunita M.P. 2C TTDokument6 SeitenYunita M.P. 2C TTYunita Maulidia PratiwiNoch keine Bewertungen
- Cosmic Ray Muons and The Muon LifetimeDokument13 SeitenCosmic Ray Muons and The Muon Lifetimejohnsmith37758Noch keine Bewertungen
- Spectrum Analysis of 2-D Plasmon in Gan-Based High Electron Mobility TransistorsDokument7 SeitenSpectrum Analysis of 2-D Plasmon in Gan-Based High Electron Mobility TransistorsrsrinivasavaradanNoch keine Bewertungen
- 567 215 PDFDokument4 Seiten567 215 PDFconcord1103Noch keine Bewertungen
- 4 Light Waveguiding in Thin Magnetic Films: 4.1 Normal Modes, and Waveguiding ConditionsDokument12 Seiten4 Light Waveguiding in Thin Magnetic Films: 4.1 Normal Modes, and Waveguiding ConditionsatifbhattNoch keine Bewertungen
- Chapter 3Dokument28 SeitenChapter 3Dean HazinehNoch keine Bewertungen
- TIS (Travel Information System) : These System Is Used To Data Communication System in Medium Frequency (MF)Dokument20 SeitenTIS (Travel Information System) : These System Is Used To Data Communication System in Medium Frequency (MF)Basuki Rahmat HakimNoch keine Bewertungen
- Lecture 2 - Transmission Line Theory (Part1)Dokument65 SeitenLecture 2 - Transmission Line Theory (Part1)Younis FadlNoch keine Bewertungen
- Chapter 3Dokument22 SeitenChapter 3Pedro MiguelNoch keine Bewertungen
- Ch6 PDFDokument34 SeitenCh6 PDFVennela VasupilliNoch keine Bewertungen
- Adam 1990Dokument15 SeitenAdam 1990M. UmarNoch keine Bewertungen
- Nga Tdem Teq 3Dokument7 SeitenNga Tdem Teq 3Gian Angga PratamaNoch keine Bewertungen
- Raouf 1986Dokument12 SeitenRaouf 1986VicNoch keine Bewertungen
- Longitudinal Behaviour of Grounding Electrodes Subjected To Lightning Currents Using SSR Based TLMDokument5 SeitenLongitudinal Behaviour of Grounding Electrodes Subjected To Lightning Currents Using SSR Based TLMnam321985Noch keine Bewertungen
- X.Wang Et Al - Interference-Induced Terahertz Transparency in A Semiconductor Magneto-PlasmaDokument5 SeitenX.Wang Et Al - Interference-Induced Terahertz Transparency in A Semiconductor Magneto-PlasmaDublin000Noch keine Bewertungen
- Waveguide 2Dokument58 SeitenWaveguide 2Frederico Maila50% (2)
- 2Dokument39 Seiten2Masood NizamiNoch keine Bewertungen
- Modes:: Oh. UsaDokument4 SeitenModes:: Oh. UsaMurthyNoch keine Bewertungen
- Patch Antennas: ObjectivesDokument17 SeitenPatch Antennas: ObjectivesNaveed ahmadNoch keine Bewertungen
- Lecture 14Dokument8 SeitenLecture 14captainhassNoch keine Bewertungen
- Web Mit Edu Mouser WWW Railgun Physics HTMLDokument4 SeitenWeb Mit Edu Mouser WWW Railgun Physics HTMLBISWAJIT NAYAKNoch keine Bewertungen
- Microstrip Stripline and CPW Design PDFDokument27 SeitenMicrostrip Stripline and CPW Design PDFGECM85Noch keine Bewertungen
- Application & Development of MTDokument7 SeitenApplication & Development of MTafrisalminerNoch keine Bewertungen
- El5753 1Dokument26 SeitenEl5753 1Pari PatelNoch keine Bewertungen
- Single-Cycle Terahertz Electromagnetic Pulses: A New Test Bed For Physical Seismic ModelingDokument6 SeitenSingle-Cycle Terahertz Electromagnetic Pulses: A New Test Bed For Physical Seismic ModelingBayer MitrovicNoch keine Bewertungen
- Steady-Periodic Method For Modelingmode Instability in Fiber AmplifiersDokument18 SeitenSteady-Periodic Method For Modelingmode Instability in Fiber Amplifiersali2296Noch keine Bewertungen
- Cambridge IGCSE: Physics 0625/23Dokument20 SeitenCambridge IGCSE: Physics 0625/23...Noch keine Bewertungen
- Ideal Dependent SourceDokument6 SeitenIdeal Dependent SourceLarios, Miguel Angelo S. -CEANoch keine Bewertungen
- Module 6 NANODokument12 SeitenModule 6 NANOKatari SreenuNoch keine Bewertungen
- SG920 Electrically Conductive GreaseDokument2 SeitenSG920 Electrically Conductive GreaseRaghavendra MurthyNoch keine Bewertungen
- 3 - Current Electricity - Theory & Solved Exam Module-4Dokument40 Seiten3 - Current Electricity - Theory & Solved Exam Module-4Raju SinghNoch keine Bewertungen
- Skin EffectDokument12 SeitenSkin EffectbizarunNoch keine Bewertungen
- 12 Physics Revision Notes Chapter 14Dokument20 Seiten12 Physics Revision Notes Chapter 14Shahbaz KhanNoch keine Bewertungen
- Electro Chemistry: Short Answer QuestionsDokument10 SeitenElectro Chemistry: Short Answer QuestionsSameer SalmanNoch keine Bewertungen
- EPS Test 2 Conductor & Cables April 2022-Ans-3Dokument7 SeitenEPS Test 2 Conductor & Cables April 2022-Ans-3Nyoka DunnNoch keine Bewertungen
- Jiao Wsu 0251E 11175Dokument182 SeitenJiao Wsu 0251E 11175Aarti ChameNoch keine Bewertungen
- Kingspan Kooltherm k106 90mm Standard Details Brochure en GB v04Dokument80 SeitenKingspan Kooltherm k106 90mm Standard Details Brochure en GB v04Alexandru VasileNoch keine Bewertungen
- Citing (2019) - Role of Material On The Performance of Multi-Stage Depressed CollectorsDokument4 SeitenCiting (2019) - Role of Material On The Performance of Multi-Stage Depressed CollectorsEnginNoch keine Bewertungen
- Electric Current and Theory of Electricity - Heating & Magnetic Effect - Electrical4uDokument13 SeitenElectric Current and Theory of Electricity - Heating & Magnetic Effect - Electrical4uteju2812Noch keine Bewertungen
- IES 2003 EE Conventional Paper01Dokument5 SeitenIES 2003 EE Conventional Paper01Shubham KumarNoch keine Bewertungen
- Aluminium Automotive Innovation BrochureDokument29 SeitenAluminium Automotive Innovation BrochureMohamed NasrNoch keine Bewertungen
- Resistance and ResisitivityDokument18 SeitenResistance and ResisitivitySophiaFayeBiongNoch keine Bewertungen
- Instrumentation CablesDokument24 SeitenInstrumentation CablesNAO_198Noch keine Bewertungen
- Pauli Exclusion PrincipleDokument66 SeitenPauli Exclusion PrincipleAtul SinghNoch keine Bewertungen
- SMT - Sharanamma S.Diggavi Memorial Education Trust (R)Dokument4 SeitenSMT - Sharanamma S.Diggavi Memorial Education Trust (R)Raghuram SwamyNoch keine Bewertungen
- Cap Ngam 24KV-1x500mm2Dokument10 SeitenCap Ngam 24KV-1x500mm2Minh VienNoch keine Bewertungen