Das könnte Ihnen auch gefallen
- 1-Architecture of 8085Dokument34 Seiten1-Architecture of 8085Pinki KumariNoch keine Bewertungen
- Body Electrical SystemDokument360 SeitenBody Electrical Systemsebastião SantosNoch keine Bewertungen
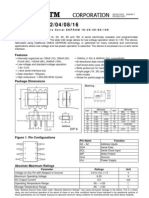
- 2-Wire Serial EEPROM: FeaturesDokument23 Seiten2-Wire Serial EEPROM: FeaturesgillupilluNoch keine Bewertungen
- Quick Start Platinum 2000 V11 PDFDokument20 SeitenQuick Start Platinum 2000 V11 PDFSarif AkbarNoch keine Bewertungen
- Tang NANO 2704 (Schematic)Dokument1 SeiteTang NANO 2704 (Schematic)June Anthony Asistio100% (1)
- Body Electrical System - PDF - LIL EVODokument107 SeitenBody Electrical System - PDF - LIL EVOShannon AsimNoch keine Bewertungen
- Can Communication: Can Communication System: Terminals ofDokument11 SeitenCan Communication: Can Communication System: Terminals ofKiddNoch keine Bewertungen
- Insulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeDokument16 SeitenInsulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeSalah Al-AbsiNoch keine Bewertungen
- 2-Wire Serial EEPROM: FeaturesDokument26 Seiten2-Wire Serial EEPROM: FeaturesLinkyNoch keine Bewertungen
- Low Boy Ganzo DollyDokument55 SeitenLow Boy Ganzo DollyDaniel Vargas RibeiroNoch keine Bewertungen
- ESCL Tpi Diagnosis FlowchartDokument36 SeitenESCL Tpi Diagnosis FlowchartCristian SindieNoch keine Bewertungen
- Apexi PowerFC WikipediaDokument9 SeitenApexi PowerFC WikipediarxhughesNoch keine Bewertungen
- 26MF605W - LCD TV MonitorDokument108 Seiten26MF605W - LCD TV MonitorJesus SilvaNoch keine Bewertungen
- Lecture-6 (Microprocessors and Microcontrollers)Dokument25 SeitenLecture-6 (Microprocessors and Microcontrollers)KhuleedShaikhNoch keine Bewertungen
- PC Control Using TV RemoteDokument46 SeitenPC Control Using TV RemoteManojKumarNoch keine Bewertungen
- Timers, Serial, InterDokument107 SeitenTimers, Serial, Inters sreehari,Noch keine Bewertungen
- Lab 09 - MESDokument8 SeitenLab 09 - MESMuhammad Sarmad BaigNoch keine Bewertungen
- Typical LED SymbolDokument4 SeitenTypical LED Symbolthy thy thyNoch keine Bewertungen
- AP3213211 TriCore AUDO F BootloaderDokument40 SeitenAP3213211 TriCore AUDO F BootloaderAnonymous xTGQYFrNoch keine Bewertungen
- 1541383764248Dokument85 Seiten1541383764248draNoch keine Bewertungen
- DatasheetDokument50 SeitenDatasheetLuis BarbosaNoch keine Bewertungen
- Esquema Elétrico Asus Nexus 7 ME370TDokument44 SeitenEsquema Elétrico Asus Nexus 7 ME370TCarlos VenturaNoch keine Bewertungen
- "Keypad and LCD Interfacing Using MicrocontrollerDokument23 Seiten"Keypad and LCD Interfacing Using MicrocontrollerKamal PatidarNoch keine Bewertungen
- FSM DesignDokument61 SeitenFSM DesignParesh SawantNoch keine Bewertungen
- 5a-AVR-Timers (8 Bit)Dokument32 Seiten5a-AVR-Timers (8 Bit)Muhammad BilalNoch keine Bewertungen
- TV Philips LC4.2HE-Service ManualDokument0 SeitenTV Philips LC4.2HE-Service ManualAnonymous RCPxaonfvNoch keine Bewertungen
- Sfi System: PrecautionDokument60 SeitenSfi System: PrecautionChristian Linares AbreuNoch keine Bewertungen
- MicrocontrollerDokument53 SeitenMicrocontrollerMoumita Bera100% (3)
- Microsquirt-Module Developers Guide-3.4Dokument17 SeitenMicrosquirt-Module Developers Guide-3.4Pedro Felipe Alves de OliveiraNoch keine Bewertungen
- SIM7600G H 4G HAT Schematic PDFDokument1 SeiteSIM7600G H 4G HAT Schematic PDFshri02Noch keine Bewertungen
- Datasheet EEPROMDokument9 SeitenDatasheet EEPROMIram Loya ValladaresNoch keine Bewertungen
- Guía Transistores SankenDokument179 SeitenGuía Transistores SankeneudoNoch keine Bewertungen
- Sanken IC RegulatorsDokument126 SeitenSanken IC RegulatorsCarlos Eduardo FreuNoch keine Bewertungen
- Plume P8-PGN605 DiagramDokument1 SeitePlume P8-PGN605 DiagramncirNoch keine Bewertungen
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Dokument83 SeitenSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaNoch keine Bewertungen
- Digital Electronics Circuit: Assignment - 2Dokument28 SeitenDigital Electronics Circuit: Assignment - 2Rubal SharmaNoch keine Bewertungen
- stm32 Microcontroller System Memory Boot Mode StmicroelectronicsDokument431 Seitenstm32 Microcontroller System Memory Boot Mode StmicroelectronicsMarius NoybNoch keine Bewertungen
- MicrocontrollersDokument34 SeitenMicrocontrollersFaridNoch keine Bewertungen
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDokument29 SeitenAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Panasonic 2007 LCD Models TV Service Guide PDFDokument109 SeitenPanasonic 2007 LCD Models TV Service Guide PDFOakkar OrgNoch keine Bewertungen
- Electronic Control Unit (ECU) : Ankul GuptaDokument20 SeitenElectronic Control Unit (ECU) : Ankul Guptadarkim ajahNoch keine Bewertungen
- New 8051 MeterialDokument113 SeitenNew 8051 Meterialpraneeth saiNoch keine Bewertungen
- Unit 2-3Dokument38 SeitenUnit 2-3vidhya sNoch keine Bewertungen
- 11.3.2013 19:01:46 D:/work/eagle - projects/Mustang/ECU - SCH (Sheet: 1/6)Dokument6 Seiten11.3.2013 19:01:46 D:/work/eagle - projects/Mustang/ECU - SCH (Sheet: 1/6)Boris Zhilkin100% (1)
- Analysis and Design of Combinational Logic CirciutsDokument74 SeitenAnalysis and Design of Combinational Logic CirciutsMS RahilNoch keine Bewertungen
- 1-1 AVR Studio TutorialDokument19 Seiten1-1 AVR Studio TutorialRaluca RaluNoch keine Bewertungen
- Port ProgrammingDokument29 SeitenPort ProgrammingWaleed Ullah Wahlah100% (1)
- Interfacing Stepper Motor With LPC2148 Arm7Dokument8 SeitenInterfacing Stepper Motor With LPC2148 Arm7Ravi RajanNoch keine Bewertungen
- Infineon TC1767 DS v01 04 enDokument126 SeitenInfineon TC1767 DS v01 04 enAnonymous OFfJVrQY6Noch keine Bewertungen
- STM32 Nucleo Boards User Manual - ST PDFDokument54 SeitenSTM32 Nucleo Boards User Manual - ST PDFSebastian PeñaNoch keine Bewertungen
- Rfid Security Access Control System: Submitted byDokument20 SeitenRfid Security Access Control System: Submitted byVale Conde CuatzoNoch keine Bewertungen
- Arduino Arduino Arduino Arduino 2 2 2 2 Channel Channel Channel Channel Relay Relay Relay Relay Shield Shield Shield ShieldDokument8 SeitenArduino Arduino Arduino Arduino 2 2 2 2 Channel Channel Channel Channel Relay Relay Relay Relay Shield Shield Shield ShieldWisnuNoch keine Bewertungen
- TC1797 - DS - V1 3Dokument192 SeitenTC1797 - DS - V1 3Anonymous xTGQYFrNoch keine Bewertungen
- Generate 1Khz PWM Using TMS320F2812 DSPDokument13 SeitenGenerate 1Khz PWM Using TMS320F2812 DSPVisu Tamil100% (1)
- Course Title: Microprocessor Interfacing TechnologiesDokument22 SeitenCourse Title: Microprocessor Interfacing Technologiesaftab_afzal_2Noch keine Bewertungen
- Isa ArchitectureDokument108 SeitenIsa ArchitectureseyfiNoch keine Bewertungen
- Instruction Set ArchitectureDokument8 SeitenInstruction Set ArchitecturekalpanasripathiNoch keine Bewertungen
- 16-Channel Relay Module Board 16 - Channel Relay Module BoardDokument2 Seiten16-Channel Relay Module Board 16 - Channel Relay Module BoardAliNoch keine Bewertungen
- 8051 PPT For MSCDokument138 Seiten8051 PPT For MSCvikash sharmaNoch keine Bewertungen
- Basic Concepts in Serial I/O Interfacing I/O DevicesDokument33 SeitenBasic Concepts in Serial I/O Interfacing I/O DevicessubendNoch keine Bewertungen
- What Are The Physical Addresses For The Following Logical AddressesDokument5 SeitenWhat Are The Physical Addresses For The Following Logical AddressesObelisk4100% (2)
- FEM Continum Overview and SolutionDokument22 SeitenFEM Continum Overview and Solutionsubash sahNoch keine Bewertungen
- Delmia IgripDokument6 SeitenDelmia Igrip6toNoch keine Bewertungen
- RSLTE020 MIMO and OFDM RSLTEDokument114 SeitenRSLTE020 MIMO and OFDM RSLTEAnonymous DUua3A5Noch keine Bewertungen
- Chapter - 1 - Introduction To Eng EconomyDokument11 SeitenChapter - 1 - Introduction To Eng Economyliyana2030Noch keine Bewertungen
- 8086 Family Users M 00 IntelDokument132 Seiten8086 Family Users M 00 IntelfcoppoleNoch keine Bewertungen
- Notes On Managed Service and Outsourcing Implementation and ManagementDokument40 SeitenNotes On Managed Service and Outsourcing Implementation and ManagementAlan McSweeney100% (2)
- Samr Classification Guide (By: DR - Rapatan)Dokument2 SeitenSamr Classification Guide (By: DR - Rapatan)Jalieca Lumbria GadongNoch keine Bewertungen
- All Autolisp CommandsDokument6 SeitenAll Autolisp CommandsJay RammaNoch keine Bewertungen
- Validation of An Actuator Disc Model: Pire@risoe - Dtu.dk Nsqr@risoe - Dtu.dk Frza@risoe - Dtu.dkDokument10 SeitenValidation of An Actuator Disc Model: Pire@risoe - Dtu.dk Nsqr@risoe - Dtu.dk Frza@risoe - Dtu.dkpierre_elouanNoch keine Bewertungen
- BMC Remedy Action Request System 7.6.04 Concepts GuideDokument102 SeitenBMC Remedy Action Request System 7.6.04 Concepts GuidepepeNoch keine Bewertungen
- Project ReportDokument3 SeitenProject ReportMehzin BakerNoch keine Bewertungen
- Third Party SalesDokument4 SeitenThird Party SalesVicky KumarNoch keine Bewertungen
- For More Free KCSE Revision Past Papers and AnswersDokument4 SeitenFor More Free KCSE Revision Past Papers and Answerslixus mwangi100% (1)
- CMME 2 ReportDokument7 SeitenCMME 2 ReportMicro YuchenNoch keine Bewertungen
- DDI Dimensional Imaging DI3DDokument4 SeitenDDI Dimensional Imaging DI3DgildsonrjNoch keine Bewertungen
- Manual Testing Interview Questions AnswersDokument17 SeitenManual Testing Interview Questions AnswerssakibssNoch keine Bewertungen
- Data Compression UNIT-2: B) Greedy AlgorithmDokument4 SeitenData Compression UNIT-2: B) Greedy AlgorithmTushar BakshiNoch keine Bewertungen
- Guide To Using Toad For Oracle Quickstartguide 7681 PDFDokument162 SeitenGuide To Using Toad For Oracle Quickstartguide 7681 PDFdjtachuNoch keine Bewertungen
- CS 610 Solved MCQS Mega FileDokument50 SeitenCS 610 Solved MCQS Mega Filecool_eyez56% (9)
- Centran Getting Started Guide PDFDokument131 SeitenCentran Getting Started Guide PDFbobbysetiawan91Noch keine Bewertungen
- Communication Workflow ProcessDokument1 SeiteCommunication Workflow ProcessNylocNoch keine Bewertungen
- FB Audience InsightsDokument1 SeiteFB Audience InsightsJJ VIINoch keine Bewertungen
- New Flow GraphDokument8 SeitenNew Flow GraphImam Gunawan100% (1)
- Pve Cross Reference en PDFDokument4 SeitenPve Cross Reference en PDFIvailo ZapryanovNoch keine Bewertungen
- Introduction To ArcMapDokument22 SeitenIntroduction To ArcMapAshok PeddiNoch keine Bewertungen
- NX Nastran Guide PDFDokument886 SeitenNX Nastran Guide PDFPedro FélixNoch keine Bewertungen
- CV For SwissDokument14 SeitenCV For SwissEko Bambang SaputroNoch keine Bewertungen
- Tally ERP 9 For Fixed Asset For DepreciationDokument23 SeitenTally ERP 9 For Fixed Asset For DepreciationAbdur RahmanNoch keine Bewertungen