Das könnte Ihnen auch gefallen
- Lecture 5 - Load Flow SolutionsDokument5 SeitenLecture 5 - Load Flow Solutions12onn1eNoch keine Bewertungen
- 6002 MidDokument10 Seiten6002 MidboyhuesdNoch keine Bewertungen
- Bode Lesson1Dokument32 SeitenBode Lesson1Fairus AffiniNoch keine Bewertungen
- Violin 2020 Grade 8 PDFDokument18 SeitenViolin 2020 Grade 8 PDFSam Cheng100% (1)
- Lecture 9-10 - Frequency Response MethodsDokument68 SeitenLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Oral Communication 2nd Quarter First Sem Final ExaminationDokument3 SeitenOral Communication 2nd Quarter First Sem Final ExaminationRyan Bustillo79% (14)
- Contradictions David ReidDokument92 SeitenContradictions David ReidSteven SmithNoch keine Bewertungen
- Newnes Mathematics Pocket Book for EngineersVon EverandNewnes Mathematics Pocket Book for EngineersBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Theoretical Information About Tapered Coupled Line HybridDokument18 SeitenTheoretical Information About Tapered Coupled Line HybridDaniel ManoleNoch keine Bewertungen
- Lateral Load Design EtabsDokument142 SeitenLateral Load Design Etabsalijahromi94Noch keine Bewertungen
- Queue Tree - Mutiple Wan Interfaces - What Should Be The Parent - MikroTikDokument25 SeitenQueue Tree - Mutiple Wan Interfaces - What Should Be The Parent - MikroTikTony CervantesNoch keine Bewertungen
- Column Design EC2Dokument41 SeitenColumn Design EC2Azrai AzizNoch keine Bewertungen
- Calculation of PCB Track ImpedanceDokument6 SeitenCalculation of PCB Track ImpedanceDurbha RaviNoch keine Bewertungen
- Bellman FordDokument4 SeitenBellman Fordacharya_s2005100% (1)
- Matlab Plotting For EeDokument15 SeitenMatlab Plotting For EeNarayana Sarma MarthiNoch keine Bewertungen
- Derivation of K0 FactorDokument6 SeitenDerivation of K0 FactorrajutadhikariNoch keine Bewertungen
- A Uniform Line Model For Non-Uniform Single-Phase Lines With Frequency Dependent Electrical ParametersDokument6 SeitenA Uniform Line Model For Non-Uniform Single-Phase Lines With Frequency Dependent Electrical ParametersItalo ChiarellaNoch keine Bewertungen
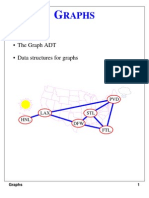
- Raphs: - Definitions - The Graph ADT - Data Structures For GraphsDokument27 SeitenRaphs: - Definitions - The Graph ADT - Data Structures For GraphsGowtham KrishnaNoch keine Bewertungen
- Xiicleee RBP 1754revDokument6 SeitenXiicleee RBP 1754revrbargallo0Noch keine Bewertungen
- Randomized Speedup of The Bellman-Ford AlgorithmDokument12 SeitenRandomized Speedup of The Bellman-Ford AlgorithmSammar AbbasNoch keine Bewertungen
- Algorithm Homework HelpDokument9 SeitenAlgorithm Homework HelpProgramming Homework HelpNoch keine Bewertungen
- PS2 Lab ManualDokument37 SeitenPS2 Lab ManualFariha shaikhNoch keine Bewertungen
- Programming Homework HelpDokument9 SeitenProgramming Homework HelpProgramming Homework HelpNoch keine Bewertungen
- Algorithm Exam HelpDokument9 SeitenAlgorithm Exam HelpProgramming Exam HelpNoch keine Bewertungen
- Pss Lab 4Dokument49 SeitenPss Lab 4BHUVANESHWARI MNoch keine Bewertungen
- Computer Applicaation in Power System Lab. ManualDokument19 SeitenComputer Applicaation in Power System Lab. ManualVarsha MeharNoch keine Bewertungen
- End TermDokument12 SeitenEnd TermCarmela Elaco VillanuevaNoch keine Bewertungen
- TechRef Overhead Line ModelsDokument12 SeitenTechRef Overhead Line ModelsLalo PatoNoch keine Bewertungen
- Pertemuan 4. Analisis Rangkaian DigitalDokument28 SeitenPertemuan 4. Analisis Rangkaian DigitalADeka SapoetraNoch keine Bewertungen
- KIL1005: Numerical Methods For Engineering: Semester 2, Session 2019/2020 7 May 2020Dokument16 SeitenKIL1005: Numerical Methods For Engineering: Semester 2, Session 2019/2020 7 May 2020Safayet AzizNoch keine Bewertungen
- Inertial Sensor Noise Analysis Using Allan Variance - MATLAB & SimulinkDokument10 SeitenInertial Sensor Noise Analysis Using Allan Variance - MATLAB & SimulinkParasaram SrinivasNoch keine Bewertungen
- Matlab Control ToolsDokument6 SeitenMatlab Control ToolsAhmad ElsheemyNoch keine Bewertungen
- ('Christos Papadimitriou', 'Final', ' (Solution) ') Fall 2009Dokument7 Seiten('Christos Papadimitriou', 'Final', ' (Solution) ') Fall 2009John SmithNoch keine Bewertungen
- Smith ChartDokument14 SeitenSmith ChartEmiaj LabampaNoch keine Bewertungen
- Digital Design ch3Dokument63 SeitenDigital Design ch3gaascrNoch keine Bewertungen
- Project 13 - Impedance Matching Design Using Lumped and Distributed Implementations in ADS (October 2013)Dokument12 SeitenProject 13 - Impedance Matching Design Using Lumped and Distributed Implementations in ADS (October 2013)Stephen J. WattNoch keine Bewertungen
- Graph Theory: Dr. Safaa O. Al-MamoryDokument34 SeitenGraph Theory: Dr. Safaa O. Al-MamoryAhmed HussainNoch keine Bewertungen
- Macheler 1993Dokument22 SeitenMacheler 1993Domenico VizzariNoch keine Bewertungen
- Matlab For Electric CircuitsDokument12 SeitenMatlab For Electric CircuitsIftikhar KhanNoch keine Bewertungen
- 10 1 1 112 2812Dokument49 Seiten10 1 1 112 2812Abdulazeez Ayomide AdebimpeNoch keine Bewertungen
- 1.1 Simple Span Beams: CHAPTER 1: Analysis of BeamsDokument11 Seiten1.1 Simple Span Beams: CHAPTER 1: Analysis of BeamsRaza AidanNoch keine Bewertungen
- EE101A Practice+Final+with+SolutionsDokument14 SeitenEE101A Practice+Final+with+SolutionsrandomDayNoch keine Bewertungen
- Best Algorithms Design Assignment HelpDokument17 SeitenBest Algorithms Design Assignment HelpProgramming Homework HelpNoch keine Bewertungen
- Tikz Package For EconomistsDokument29 SeitenTikz Package For Economistsskydiver_tf8156Noch keine Bewertungen
- Unit 4 Graph Theory: Prepared By: Ramesh RimalDokument129 SeitenUnit 4 Graph Theory: Prepared By: Ramesh RimalramnathNoch keine Bewertungen
- Re-Exam "Discrete: Optimization"Dokument5 SeitenRe-Exam "Discrete: Optimization"LotteWeedageNoch keine Bewertungen
- ECE 1311 Ch9Dokument41 SeitenECE 1311 Ch9Fatihah AinaNoch keine Bewertungen
- Three Phase Power System in MathcadDokument11 SeitenThree Phase Power System in MathcadkamuikNoch keine Bewertungen
- Power Line ParametersDokument11 SeitenPower Line ParametersurdemalezNoch keine Bewertungen
- SNS Lab14Dokument12 SeitenSNS Lab14I190845 Samana NayyabNoch keine Bewertungen
- 1802SupplementaryNotes FullDokument235 Seiten1802SupplementaryNotes FullCourtney WilliamsNoch keine Bewertungen
- 13 Freq Response AICDokument84 Seiten13 Freq Response AICDavid BayuNoch keine Bewertungen
- 2 4 The Smith Chart PackageDokument100 Seiten2 4 The Smith Chart PackageEsmail AhouziNoch keine Bewertungen
- Frequency Domain Controller DesignDokument45 SeitenFrequency Domain Controller Designmarcum01Noch keine Bewertungen
- Combinatorial Optimisation, Exam 20 October 2009Dokument3 SeitenCombinatorial Optimisation, Exam 20 October 2009narendraNoch keine Bewertungen
- V e V e: V V Voltage reflection coefficient - Complex = + − ΓDokument13 SeitenV e V e: V V Voltage reflection coefficient - Complex = + − ΓTomáš ShejbalNoch keine Bewertungen
- دوائر كهربية 5Dokument36 Seitenدوائر كهربية 5mustafasalaheldin2003Noch keine Bewertungen
- ps5 Thermal GuideDokument6 Seitenps5 Thermal GuideSundaramNoch keine Bewertungen
- Horn AntennasDokument29 SeitenHorn AntennasAbderrahmane BadisNoch keine Bewertungen
- Error Analysis And: Graph DrawingDokument26 SeitenError Analysis And: Graph DrawingNischay KaushikNoch keine Bewertungen
- Lovely Professional University: DeclarationDokument5 SeitenLovely Professional University: DeclarationShekhar RanaNoch keine Bewertungen
- Topographical Tools for Filtering and Segmentation 2: Flooding and Marker-based Segmentation on Node- or Edge-weighted GraphsVon EverandTopographical Tools for Filtering and Segmentation 2: Flooding and Marker-based Segmentation on Node- or Edge-weighted GraphsNoch keine Bewertungen
- Laura. " - ". A. Yes, It's An Absurd Idea B. ItDokument5 SeitenLaura. " - ". A. Yes, It's An Absurd Idea B. ItThai Thi Hong LoanNoch keine Bewertungen
- Mark The Letter A, B, C, or D On Your Answer Sheet To Indicate The Correct Answer To Each of The Following QuestionsDokument5 SeitenMark The Letter A, B, C, or D On Your Answer Sheet To Indicate The Correct Answer To Each of The Following QuestionsThai Thi Hong LoanNoch keine Bewertungen
- Choose The Best Option Among A, B, C, or D To Finish The FollowingDokument5 SeitenChoose The Best Option Among A, B, C, or D To Finish The FollowingThai Thi Hong LoanNoch keine Bewertungen
- D. Neither Here Nor There: WWW - Violet.vn/quocbinh72Dokument9 SeitenD. Neither Here Nor There: WWW - Violet.vn/quocbinh72Thai Thi Hong LoanNoch keine Bewertungen
- C. Square C. ChemistDokument5 SeitenC. Square C. ChemistThai Thi Hong LoanNoch keine Bewertungen
- Sở Gd&Đt Vĩnh Phúc Trường Thpt Liễn Sơn (ĐỀ LUYỆN 224) Đề Thi Thử Thpt Quốc Gia Năm 2015 Môn Thi: Tiếng Anh Thời gian: 90 phút Phần Trắc Nghiệm: (8 Điểm)Dokument5 SeitenSở Gd&Đt Vĩnh Phúc Trường Thpt Liễn Sơn (ĐỀ LUYỆN 224) Đề Thi Thử Thpt Quốc Gia Năm 2015 Môn Thi: Tiếng Anh Thời gian: 90 phút Phần Trắc Nghiệm: (8 Điểm)Thai Thi Hong LoanNoch keine Bewertungen
- Phần Trắc Nghiệm: (8 Điểm) : that the room was quite bareDokument6 SeitenPhần Trắc Nghiệm: (8 Điểm) : that the room was quite bareThai Thi Hong LoanNoch keine Bewertungen
- Read The Following Passage and Mark The Letter A, B, C, or D On Your Answer Sheet To Indicate The Correct Answer To Each of The QuestionsDokument6 SeitenRead The Following Passage and Mark The Letter A, B, C, or D On Your Answer Sheet To Indicate The Correct Answer To Each of The QuestionsThai Thi Hong LoanNoch keine Bewertungen
- Cigarette Fatally: Following Questions. The Use of Lasers in Surgery Has Become Relatively Commonplace in Recent YearsDokument5 SeitenCigarette Fatally: Following Questions. The Use of Lasers in Surgery Has Become Relatively Commonplace in Recent YearsThai Thi Hong LoanNoch keine Bewertungen
- since massage: (Đề thi gồm: 06 trang) Thời gian làm bài: 90 phút, không kể thời gian phát đềDokument6 Seitensince massage: (Đề thi gồm: 06 trang) Thời gian làm bài: 90 phút, không kể thời gian phát đềThai Thi Hong LoanNoch keine Bewertungen
- Tense Simple PresentDokument3 SeitenTense Simple PresentThai Thi Hong LoanNoch keine Bewertungen
- Sở Giáo Dục Và Ðào Tạo Bắc Ninh: Thời gian làm bài: 90 phút (Ðề thi gồm 7 trang)Dokument23 SeitenSở Giáo Dục Và Ðào Tạo Bắc Ninh: Thời gian làm bài: 90 phút (Ðề thi gồm 7 trang)Thai Thi Hong LoanNoch keine Bewertungen
- Sở Gd&Đt Vĩnh Phúc Trường Thpt Liễn Sơn (ĐỀ LUYỆN 258) Đề Thi Thử Thpt Quốc Gia Năm 2015 Môn Thi: Tiếng Anh Thời gian: 90 phút Phần Trắc Nghiệm: (8 Điểm)Dokument5 SeitenSở Gd&Đt Vĩnh Phúc Trường Thpt Liễn Sơn (ĐỀ LUYỆN 258) Đề Thi Thử Thpt Quốc Gia Năm 2015 Môn Thi: Tiếng Anh Thời gian: 90 phút Phần Trắc Nghiệm: (8 Điểm)Thai Thi Hong LoanNoch keine Bewertungen
- Choose Among A.B.C.D A Word Whose Underlined Part Is Pronounciated Differently From The RestDokument5 SeitenChoose Among A.B.C.D A Word Whose Underlined Part Is Pronounciated Differently From The RestThai Thi Hong LoanNoch keine Bewertungen
- Họ, tên thí sinh: ………………………….. Lớp: ………… Số báo danh: ……………Dokument23 SeitenHọ, tên thí sinh: ………………………….. Lớp: ………… Số báo danh: ……………Thai Thi Hong LoanNoch keine Bewertungen
- Work Protein Elephant Cupboard Assist: From "Reading Power" by Beatrice S. Mikulecky and Linda JeffriesDokument5 SeitenWork Protein Elephant Cupboard Assist: From "Reading Power" by Beatrice S. Mikulecky and Linda JeffriesThai Thi Hong LoanNoch keine Bewertungen
- Reading The Following Passage and Mark The Letter A, B, C or D On Your Answer Sheet To Indicate The CorrectDokument5 SeitenReading The Following Passage and Mark The Letter A, B, C or D On Your Answer Sheet To Indicate The CorrectThai Thi Hong LoanNoch keine Bewertungen
- PART 1: MULTIPLE CHOICE (0.125 X 64 8.0p) : WWW - Violet.vn/quocbinh72Dokument6 SeitenPART 1: MULTIPLE CHOICE (0.125 X 64 8.0p) : WWW - Violet.vn/quocbinh72Thai Thi Hong LoanNoch keine Bewertungen
- Kiểm tra 1 tiết tiếng Anh lớp 10 HKIIDokument11 SeitenKiểm tra 1 tiết tiếng Anh lớp 10 HKIIThai Thi Hong LoanNoch keine Bewertungen
- Ôn tập HKII tiếng Anh lớp 10Dokument9 SeitenÔn tập HKII tiếng Anh lớp 10Thai Thi Hong LoanNoch keine Bewertungen
- n tập bài 4, 5, 6 tiếng Anh lớp 10Dokument12 Seitenn tập bài 4, 5, 6 tiếng Anh lớp 10Thai Thi Hong LoanNoch keine Bewertungen
- De Thi Hoc Ki 1 Lop 10 Anh Nguyen Cong Hoan PDFDokument13 SeitenDe Thi Hoc Ki 1 Lop 10 Anh Nguyen Cong Hoan PDFThai Thi Hong LoanNoch keine Bewertungen
- De Thi Thu Khao Sat Chat Luong Mon Tieng Anh Lop 11 Truong THPT Nong Cong 1 Lan 2Dokument7 SeitenDe Thi Thu Khao Sat Chat Luong Mon Tieng Anh Lop 11 Truong THPT Nong Cong 1 Lan 2Thai Thi Hong LoanNoch keine Bewertungen
- De Thi Hoc Ki I Mon Tieng Anh Lop 10 Nam 2014 2015 Truong THPT Lien SonDokument3 SeitenDe Thi Hoc Ki I Mon Tieng Anh Lop 10 Nam 2014 2015 Truong THPT Lien SonThai Thi Hong LoanNoch keine Bewertungen
- Bo de Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Nam Hoc 2018 2019Dokument53 SeitenBo de Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Nam Hoc 2018 2019Thai Thi Hong LoanNoch keine Bewertungen
- Họ, tên thí sinh:.......................................................................... Số báo danh:..............................................................................Dokument4 SeitenHọ, tên thí sinh:.......................................................................... Số báo danh:..............................................................................Thai Thi Hong LoanNoch keine Bewertungen
- De Kiem Tra 1 Tiet Hoc Ky 1 Mon Tieng Anh Lop 11 Truong Quoc Te A Chau Nam Hoc 2014 2015Dokument6 SeitenDe Kiem Tra 1 Tiet Hoc Ky 1 Mon Tieng Anh Lop 11 Truong Quoc Te A Chau Nam Hoc 2014 2015Thai Thi Hong LoanNoch keine Bewertungen
- Dap An de Thi Hoc Ki I Mon Tieng Anh Lop 10 Nam 2014 2015 Truong THPT Lien SonDokument2 SeitenDap An de Thi Hoc Ki I Mon Tieng Anh Lop 10 Nam 2014 2015 Truong THPT Lien SonThai Thi Hong LoanNoch keine Bewertungen
- De Thi Giua Hoc Ki 1 Mon Tieng Anh Lop 11 Truong THPT Xuan Giang Nam Hoc 2017 2018 Co Dap AnDokument2 SeitenDe Thi Giua Hoc Ki 1 Mon Tieng Anh Lop 11 Truong THPT Xuan Giang Nam Hoc 2017 2018 Co Dap AnThai Thi Hong LoanNoch keine Bewertungen
- Decided Postpone: Vndoc - Tải Tài Liệu, Văn Bản Pháp Luật, Biểu Mẫu Miễn PhíDokument17 SeitenDecided Postpone: Vndoc - Tải Tài Liệu, Văn Bản Pháp Luật, Biểu Mẫu Miễn PhíThai Thi Hong LoanNoch keine Bewertungen
- Kyle Gallardo 3-1 TemplateDokument13 SeitenKyle Gallardo 3-1 Templateapi-654429634Noch keine Bewertungen
- CISCO Books ListDokument2 SeitenCISCO Books ListLourdes LealNoch keine Bewertungen
- SyntaxDokument20 SeitenSyntaxFrances ColeNoch keine Bewertungen
- Aristotle's Model of CommunicationDokument10 SeitenAristotle's Model of CommunicationJomana Macalnas100% (1)
- d49986gc20 App A PLSQLDokument208 Seitend49986gc20 App A PLSQLMoy EsquivelNoch keine Bewertungen
- 10.17 Triangle Congruence Proofs Day 2Dokument33 Seiten10.17 Triangle Congruence Proofs Day 2RETCHELLE GUILLERMONoch keine Bewertungen
- Efi Fiery Fs300pro How-To Print Perfect Bound BookletDokument5 SeitenEfi Fiery Fs300pro How-To Print Perfect Bound Bookletandria kasumaNoch keine Bewertungen
- Lifting Capacity Chart - Tabelle Di Carico Tableaux Des Charges - Tragkraft Tabelle Lasttabel - Tablas de CargaDokument46 SeitenLifting Capacity Chart - Tabelle Di Carico Tableaux Des Charges - Tragkraft Tabelle Lasttabel - Tablas de CargaLuis GonzaloNoch keine Bewertungen
- Envision G5 01 07 APDokument2 SeitenEnvision G5 01 07 APNitin NegiNoch keine Bewertungen
- Grammar New BookletDokument95 SeitenGrammar New BookletMahdi SharkawiNoch keine Bewertungen
- Ageless Shakespeare PDFDokument7 SeitenAgeless Shakespeare PDFBetty PinoNoch keine Bewertungen
- 14 - Chapter 4Dokument24 Seiten14 - Chapter 4suryamishraNoch keine Bewertungen
- Comp 4 DocumentationDokument213 SeitenComp 4 DocumentationStevenstrange001 CattyNoch keine Bewertungen
- Notes For 110.311 - Complex Analysis: 1 Contour IntegrationDokument4 SeitenNotes For 110.311 - Complex Analysis: 1 Contour IntegrationJoe BloeNoch keine Bewertungen
- Literature Assignment 1Dokument2 SeitenLiterature Assignment 1Anonymous 44sliO100% (2)
- 3 Evans V Dooley J Wright S Information TechnolDokument37 Seiten3 Evans V Dooley J Wright S Information TechnolAnna Golovko0% (1)
- Class 6 EnglishDokument66 SeitenClass 6 EnglishRahul SinghNoch keine Bewertungen
- Sample Contents: "SW Development Plan" Template: CA305 Project & Process ManagementDokument9 SeitenSample Contents: "SW Development Plan" Template: CA305 Project & Process ManagementRichard Ngalu YalakwansoNoch keine Bewertungen
- 11th Video RubricDokument1 Seite11th Video RubricFernanda CortesNoch keine Bewertungen
- Critique PaperDokument1 SeiteCritique PaperNoemi Jane AmbonNoch keine Bewertungen
- Syllabus SLC201-SpringA 2018Dokument7 SeitenSyllabus SLC201-SpringA 2018Zalacain07Noch keine Bewertungen
- 07 Introductory Lessons in AramaicDokument134 Seiten07 Introductory Lessons in AramaicTorres EdznáNoch keine Bewertungen
- ĐỀ CƯƠNG NNHĐCDokument58 SeitenĐỀ CƯƠNG NNHĐCHòa NguyễnNoch keine Bewertungen
- Lesson Plan For Science 10Dokument2 SeitenLesson Plan For Science 10Kevin GeradaNoch keine Bewertungen
- Scott - Criticism and Culture 1992Dokument25 SeitenScott - Criticism and Culture 1992Letícia CesarinoNoch keine Bewertungen