Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sample PaperDokument7 SeitenSample PaperDhiman DeyNoch keine Bewertungen
- ChapterStat 2Dokument77 SeitenChapterStat 2Md Aziq Md RaziNoch keine Bewertungen
- السمات الفنية للزخارف الهندسية وزخارف الأطباق النجميةDokument20 Seitenالسمات الفنية للزخارف الهندسية وزخارف الأطباق النجميةabdelrahman elgawish (Dr)Noch keine Bewertungen
- Discrete Structures, Logic, and Computability: Student Study GuideDokument161 SeitenDiscrete Structures, Logic, and Computability: Student Study GuideluminenttNoch keine Bewertungen
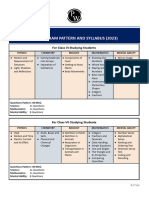
- PWNSAT 2023 SyllabusDokument5 SeitenPWNSAT 2023 SyllabusBaby SinghNoch keine Bewertungen
- MCH3008 Lab ProjectDokument4 SeitenMCH3008 Lab ProjectEJAZ AHMADNoch keine Bewertungen
- 11th National ISMO Class 8 Question Paper With SolutionsDokument10 Seiten11th National ISMO Class 8 Question Paper With SolutionsArbaz Khan100% (1)
- Ross12e - CHAPTER 4 - NMIMS - Practice Problems and Solutions For ClassDokument8 SeitenRoss12e - CHAPTER 4 - NMIMS - Practice Problems and Solutions For Classwander boyNoch keine Bewertungen
- The Hamilton Jacobi EquationDokument7 SeitenThe Hamilton Jacobi Equationcool_gardens20074304Noch keine Bewertungen
- 1.1 Classification of SignalsDokument37 Seiten1.1 Classification of SignalsIbrahim MansourNoch keine Bewertungen
- Grigori PerelmanDokument9 SeitenGrigori PerelmanMarios DarvirasNoch keine Bewertungen
- Code Using Java Fun Coding Activities For Absolute BeginnersDokument63 SeitenCode Using Java Fun Coding Activities For Absolute BeginnersLigia333Noch keine Bewertungen
- Cherry Rose T. Malgapo: Probability and StatisticsDokument26 SeitenCherry Rose T. Malgapo: Probability and StatisticscherryNoch keine Bewertungen
- Midterm Exam in Gen Math Sy 2022 2023Dokument4 SeitenMidterm Exam in Gen Math Sy 2022 2023Portgas D. AceNoch keine Bewertungen
- DSPA Solution Manual Chap 5 - KK ParhiDokument7 SeitenDSPA Solution Manual Chap 5 - KK ParhiNESEGANoch keine Bewertungen
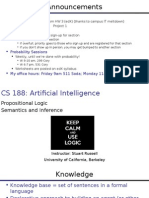
- FA15 CS188 Lecture 08 PL Semantics and Inference - pptx-2Dokument25 SeitenFA15 CS188 Lecture 08 PL Semantics and Inference - pptx-2ateiskaNoch keine Bewertungen
- Riemann Hypothesis PDFDokument6 SeitenRiemann Hypothesis PDFRafik Zeraoulia100% (1)
- CBSE Class 6 Maths Chapter 3 - Playing With Numbers Important Questions 2023-24Dokument15 SeitenCBSE Class 6 Maths Chapter 3 - Playing With Numbers Important Questions 2023-24saruNoch keine Bewertungen
- Ebook PDF Calculus AP Edition 11th Edition PDFDokument41 SeitenEbook PDF Calculus AP Edition 11th Edition PDFsandra.putnam416100% (33)
- Universal Evangelical Christian School Inc. S.Y. 2018 - 2019 Second Periodical Examination Math - 4-BDokument2 SeitenUniversal Evangelical Christian School Inc. S.Y. 2018 - 2019 Second Periodical Examination Math - 4-BJurelieNoch keine Bewertungen
- TOK ConnectionsDokument15 SeitenTOK ConnectionsLorraine SabbaghNoch keine Bewertungen
- C CheatsheetDokument1 SeiteC CheatsheetRay WanNoch keine Bewertungen
- ErrataDokument13 SeitenErrataKadir Alf GünaydınNoch keine Bewertungen
- mt2076 ch1-3Dokument78 Seitenmt2076 ch1-3Finn DonnelyNoch keine Bewertungen
- 11 CS Hy Sample Paper 2022Dokument4 Seiten11 CS Hy Sample Paper 2022aaravNoch keine Bewertungen
- DLL-9th-week 52-59Dokument8 SeitenDLL-9th-week 52-59Reina Chenna SaulongNoch keine Bewertungen
- Lecture 1 Introduction To Control SystemsDokument22 SeitenLecture 1 Introduction To Control SystemsDr. Haider Zaman Lecturer Electronics ABTNoch keine Bewertungen
- The Kalman Decomposition PDFDokument5 SeitenThe Kalman Decomposition PDFJose H. Vivas100% (2)
- Patterns and AlgebraDokument20 SeitenPatterns and AlgebrajatothuNoch keine Bewertungen
- Modular NumberDokument70 SeitenModular NumberPeiEnOngNoch keine Bewertungen